 接口兼容性陷阱:聚徽廠家解碼RS232/RS485/CAN總線如何匹配設備聯動
接口兼容性陷阱:聚徽廠家解碼RS232/RS485/CAN總線如何匹配設備聯動

在工業自動化、智能交通、樓宇自控等眾多領域,不同設備間的互聯互通至關重要。RS232、RS485 與 CAN 總線作為常見的串行通信接口,各自在數據傳輸特性、應用場景等方面存在差異,這使得設備聯動時的接口兼容性成為棘手難題。深入了解這些總線特性及匹配方法,是保障系統穩定運行、實現高效設備聯動的關鍵。
RS232 是美國電子工業協會(EIA)頒布的串行接口標準,在早期計算機與外部設備通信中廣泛應用 。它采用負邏輯電平,邏輯 “1” 為 -3V 至 -15V,邏輯 “0” 為 +3V 至 +15V,與常見的 TTL 電平(5V 為邏輯正,0V 為邏輯負)不兼容,需要額外的電平轉換電路,如常用的 MAX232 芯片來實現與 TTL 電路連接 。這種較高的信號電平值,雖在一定程度上增強了抗干擾能力,但也增加了接口電路芯片損壞的風險。
RS232 接口采用單端信號傳輸,僅用一根信號線和一根信號返回線與地線構成共地傳輸形式,這使得其極易受到共模干擾影響,抗噪聲干擾性較弱 。在異步傳輸時,其傳輸速率較低,比特率通常為 20Kbps 。并且傳輸距離有限,標準最大傳輸距離為 50 英尺(約 15 米),實際應用中往往只能達到 15 米左右。因其這些特性,RS232 主要適用于短距離、低速、點對點的通信場景,如早期計算機與調制解調器、打印機等設備的連接 。
RS485:工業領域的多節點通信能手
RS485 總線專為解決長距離、多節點通信問題而設計,在工業自動化、安防監控等領域應用廣泛 。與 RS232 不同,它采用差分信號傳輸,通過兩根線(A 和 B)之間的電壓差來表示邏輯狀態,能有效抑制共模干擾,大大增強了抗干擾能力 。
在 100Kbps 的波特率下,RS485 的傳輸距離可達 1200 米,滿足了工業場景中設備分散、距離遠的通信需求 。它支持多節點通信,一條總線上可連接多個從機設備,最多可并聯 32 臺驅動器和 32 臺接收器 。不過,RS485 通常采用半雙工通信方式,即同一時刻總線上只能有一個設備進行數據發送,發送電路需由使能信號加以控制,以避免信號沖突 。這一特性使得 RS485 非常適合構建分布式控制系統,眾多傳感器、執行器等設備可通過 RS485 總線連接至主控制器,實現數據的集中采集與控制 。
CAN 總線:高可靠性的汽車及工業通信選擇
CAN(Controller Area Network)總線最初為汽車電子領域設計,如今在工業自動化、醫療設備等對可靠性要求極高的場景中也得到廣泛應用 。它同樣采用差分信號傳輸,使用兩根差分線(CAN_H 和 CAN_L),顯性電平(邏輯 0)時,CAN_H 和 CAN_L 之間的壓差為 2V;隱性電平(邏輯 1)時,壓差為 0V 。
CAN 總線的傳輸距離與速度成反比,在 1Mbps 的波特率下,傳輸距離可達 40 米;在 50Kbps 的波特率下,傳輸距離可達 10km 。其卓越的抗干擾能力不僅源于差分信號傳輸,還得益于循環冗余校驗(CRC)等多種校驗機制 。CAN 總線支持多主仲裁,多個節點可同時嘗試發送數據,通過標識符(ID)確定優先級,ID 越小優先級越高,有效避免了總線沖突 。有標準幀和擴展幀兩種幀格式,能滿足不同數據量和應用場景的需求 。在汽車電子系統中,發動機控制單元、變速器控制單元、車載儀表等眾多設備通過 CAN 總線實時、可靠地交換數據,保障汽車的穩定運行 。
設備聯動中接口兼容性的挑戰與解決方法
電平轉換與信號匹配
由于 RS232 與 TTL 電平不兼容,在與其他基于 TTL 電平的設備聯動時,必須使用電平轉換芯片,如 MAX232、MAX3232 等 。這些芯片能將 RS232 的高電平信號轉換為 TTL 電平,反之亦然,確保設備間信號的正確傳輸 。而 RS485 和 CAN 總線雖然都是差分信號,但電平特性與其他接口不同,在連接時需要專用的收發器芯片,如 RS485 常用的 SN75176、MAX485,CAN 總線常用的 TJA1050 等,將微控制器的 TTL 電平信號轉換為符合 RS485 或 CAN 總線標準的差分信號,同時實現信號的隔離,增強系統抗干擾能力 。
通信協議適配
RS232、RS485 和 CAN 總線本身只是物理層接口標準,在設備聯動時,還需考慮上層通信協議的適配 。例如,許多設備基于 MODBUS 協議進行通信,MODBUS 協議可運行在 RS232、RS485 等物理層上 。但不同設備對 MODBUS 協議的實現細節可能存在差異,如數據幀格式、功能碼定義等 。在設備聯動前,需要仔細核對設備手冊,確保通信雙方對協議的理解一致 。對于一些不支持通用協議的設備,可能需要開發自定義通信協議,并編寫相應的驅動程序,實現設備間的數據交互 。
網絡拓撲與布線
RS232 僅適用于點對點通信,布線相對簡單 。而 RS485 和 CAN 總線支持多節點連接,在構建網絡拓撲時需要考慮節點數量、傳輸距離、信號衰減等因素 。RS485 網絡通常采用總線型拓撲結構,所有節點并聯在總線上,為減少信號反射,總線兩端需連接匹配電阻(一般為 120Ω) 。CAN 總線網絡拓撲也多為總線型,布線時要注意 CAN_H 和 CAN_L 兩根線需采用雙絞線,以進一步增強抗干擾能力,且要合理規劃節點位置,避免因布線過長導致信號失真。
通信速率與同步
不同設備支持的通信速率可能不同,RS232 速率一般較低,RS485 和 CAN 總線則可支持較高速率 。在設備聯動時,需根據設備性能和通信需求,選擇合適的通信速率,并確保所有設備設置一致 。對于異步通信的 RS232 和 RS485,設備間通過設置相同的波特率來實現數據同步 。而 CAN 總線在通信前,節點需通過波特率配置寄存器等方式,設置一致的波特率,同時利用幀同步機制確保數據的正確接收與發送 。
結語
RS232、RS485 和 CAN 總線在不同應用場景中各有優勢,在實現設備聯動時,要充分考慮它們在電平特性、通信協議、網絡拓撲及通信速率等方面的差異,通過合理的電平轉換、協議適配、布線設計及速率同步等措施,跨越接口兼容性陷阱,構建穩定、高效的設備聯動系統,為各領域的智能化發展提供有力支撐 。
-
CAN總線
+關注
關注
145文章
1986瀏覽量
132814 -
接口
+關注
關注
33文章
8997瀏覽量
153707 -
RS232
+關注
關注
13文章
808瀏覽量
95932
發布評論請先 登錄
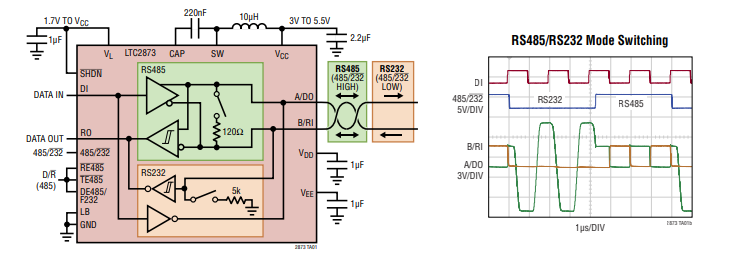
LTC2873具可通斷終端的單總線RS485/RS232多協議收發器技術手冊
RS485通信的必要性和接線方法

STM32F103上位機升級,RS485升級、CAN升級
485接口與RS232的區別 485接口在工業自動化中的應用
OpenHarmony測試RS232/RS485串口方法,觸覺智能SBC3528工控主板演示
RS485和CAN總線的比較分析
RS485與RS232的區別和選擇
RS232串口連接設備的注意事項
RS232與RS485接口之間的區別
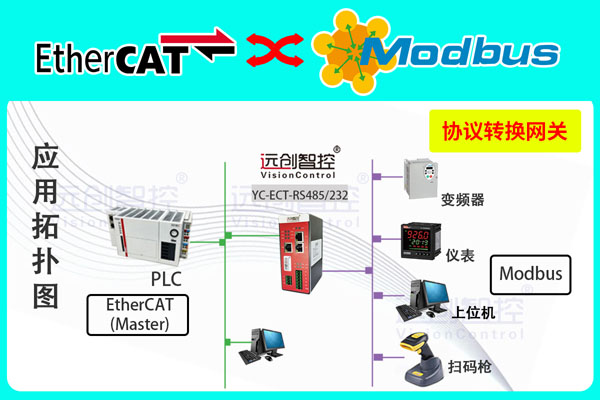
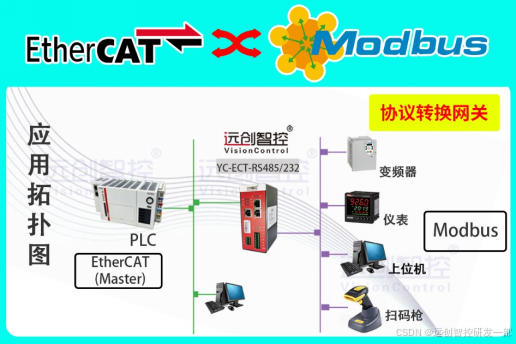
EtherCAT轉RS232/RS485主站總線協議轉換網關
RS232、RS422、RS485怎么選?串口通信標準的深度剖析!

EtherCAT從站轉RS232/RS485主站總線協議轉換網關配置詳情
RS485 RS232轉EtherCAT協議轉換網關配置案例
RS485 RS232轉EtherCAT協議轉化網關功能及配置步驟





 工商網監
工商網監
評論