") 視覺運(yùn)控一體機(jī)在DELTA并聯(lián)機(jī)械手動態(tài)跟隨抓取的應(yīng)用
視覺運(yùn)控一體機(jī)在DELTA并聯(lián)機(jī)械手動態(tài)跟隨抓取的應(yīng)用
市場應(yīng)用背景
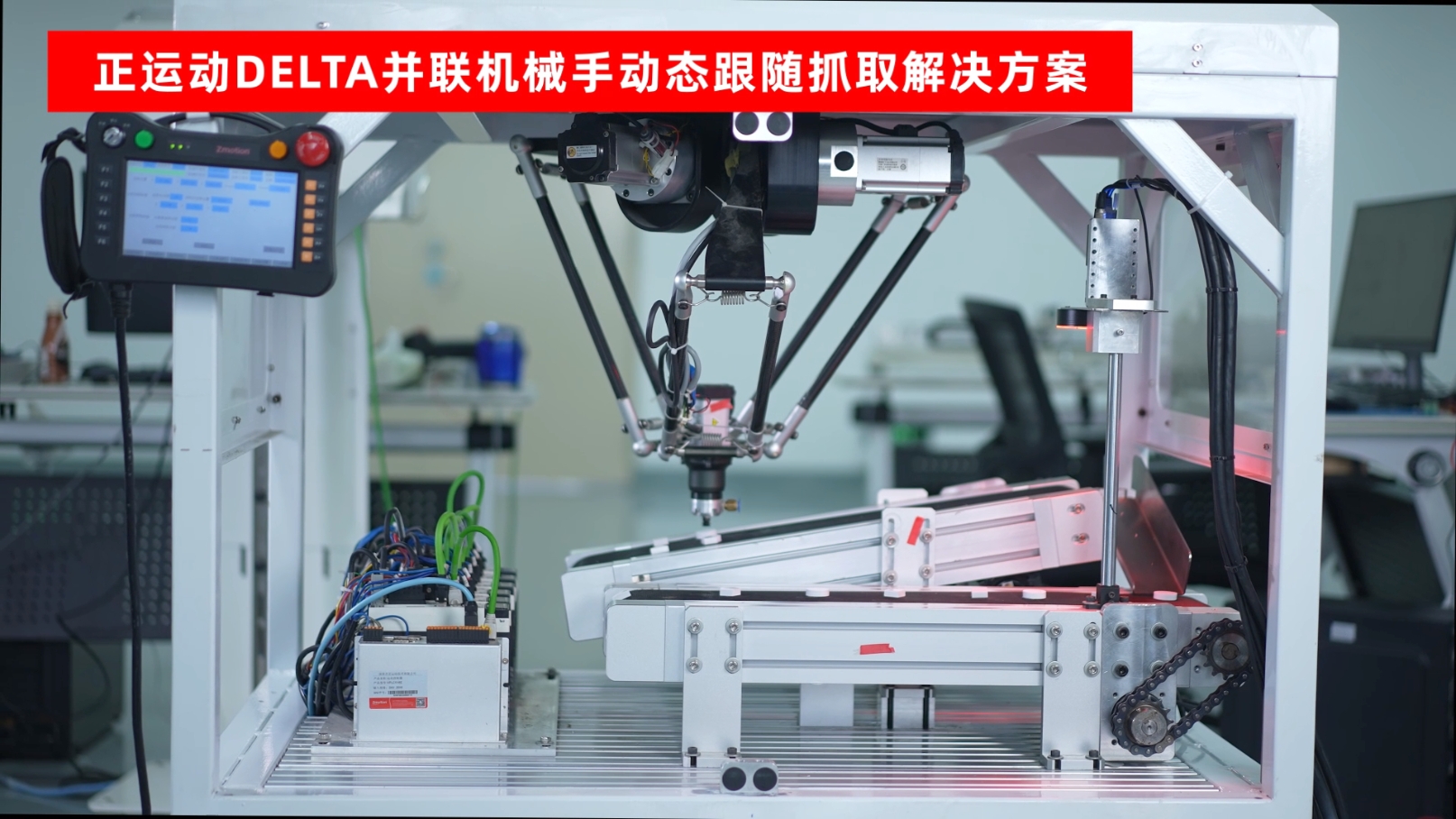
DELTA并聯(lián)機(jī)械手是由三個相同的支鏈所組成,每個支鏈包含一個轉(zhuǎn)動關(guān)節(jié)和一個移動關(guān)節(jié),具有結(jié)構(gòu)緊湊剛性高、占地面積小、高速高靈活性、無累積誤差、適合高頻次的重復(fù)作業(yè)等特點(diǎn),可在有限的空間內(nèi)進(jìn)行高效的作業(yè),廣泛應(yīng)用于食品包裝、制造加工、消費(fèi)電子等領(lǐng)域。
隨著工業(yè)水平的提高,對工作速度與精度提出了更高的要求,并聯(lián)機(jī)器人也開始向著 高速、輕型化方向發(fā)展。
食品、醫(yī)藥、3C電子行業(yè)對高效自動化需求激增,小批量多品種趨勢凸顯。動態(tài)分揀自動化成為提質(zhì)降本關(guān)鍵,并聯(lián)機(jī)器人取代人工分揀實(shí)現(xiàn)智能化突破。通過視覺系統(tǒng)精準(zhǔn)定位傳送帶上的異形物品,結(jié)合運(yùn)動控制系統(tǒng)協(xié)調(diào)機(jī)械臂軌跡,配合吸盤/夾爪等智能末端執(zhí)行器,完成高速精準(zhǔn)抓取分裝。該技術(shù)突破柔性生產(chǎn)瓶頸,滿足現(xiàn)代制造業(yè)快速換型需求。
市面上傳統(tǒng)方案的痛點(diǎn):
傳統(tǒng)食品包裝流程依賴人工在皮帶流水線進(jìn)行作業(yè),效率低且容錯率差。采用DELTA并聯(lián)機(jī)械手可實(shí)現(xiàn)高速自動化箱、封箱等工序,大幅提升包裝效率。該設(shè)備結(jié)合視覺系統(tǒng)可對產(chǎn)品進(jìn)行自動識別與檢測,有效增強(qiáng)分揀精準(zhǔn)性。當(dāng)前主流DELTA系統(tǒng)通常包含機(jī)械手控制柜、工業(yè)計(jì)算機(jī)和視覺軟件,若需整合附加傳送帶、氣動元件及傳感器則還需額外配置PLC控制系統(tǒng)。此類方案普遍存在以下缺陷:
● 硬件系統(tǒng)分散,多模塊拼裝架構(gòu);
● 通信協(xié)議繁雜,多節(jié)點(diǎn)交互困難;
● 硬件采購及運(yùn)維成本過高;
● 非標(biāo)異形件處理能力薄弱;
● 作業(yè)精度與生產(chǎn)效率雙重不足。
正運(yùn)動技術(shù)解決方案優(yōu)勢:
正運(yùn)動技術(shù)的DELTA同步跟隨分揀解決方案基于VPLC系列視覺運(yùn)動控制一體機(jī)和RTFuse視覺系統(tǒng),通過一體化集成機(jī)械手控制柜、視覺軟件、工業(yè)計(jì)算機(jī)及 PLC控制器,實(shí)現(xiàn)全功能整合式解決方案。實(shí)現(xiàn)即插即用一站式解決方案,滿足市場常見的各種物品的抓取和擺放的需求,實(shí)現(xiàn)了快速物料切換和配置工藝,提升兼容性等。方案核心優(yōu)勢如下:
● 一體化架構(gòu)設(shè)計(jì):無需額外配置工控機(jī),有效降低硬件成本與占地面積,同步縮短項(xiàng)目部署周期,降低技術(shù)實(shí)施門檻并提升系統(tǒng)響應(yīng)速度
● 三自由度并聯(lián)機(jī)構(gòu):結(jié)構(gòu)設(shè)計(jì)精密緊湊,重復(fù)定位精度高。結(jié)合伺服驅(qū)動與傳送帶,能夠?qū)崿F(xiàn)精準(zhǔn)的目標(biāo)跟蹤從而完成高速視覺分揀任務(wù)
● 模塊化人機(jī)交互:易于用戶理解和快速掌握的界面,工具、流程和界面均可任意擴(kuò)展

01 視覺運(yùn)控一體機(jī)在DELTA并聯(lián)機(jī)械手動態(tài)跟隨抓取的解決方案
DELTA并聯(lián)機(jī)械手動態(tài)跟隨抓取運(yùn)行視頻請點(diǎn)擊→“視覺運(yùn)控一體機(jī)在DELTA并聯(lián)機(jī)械手動態(tài)跟隨抓取的應(yīng)用”查看。
正運(yùn)動DELTA并聯(lián)機(jī)械手動態(tài)跟隨抓取解決方案設(shè)計(jì)
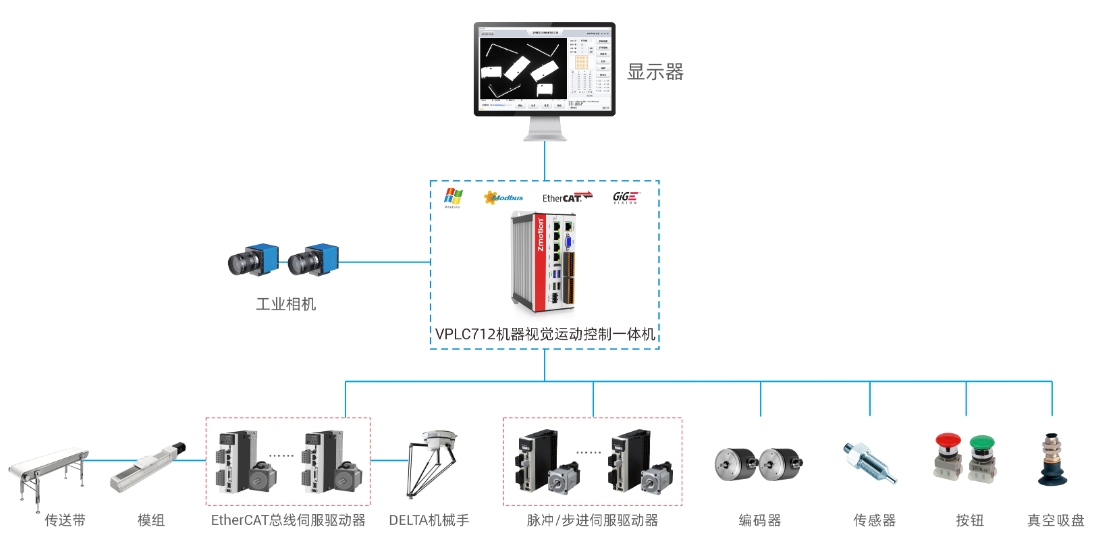
20DI:啟動/復(fù)位/停止按鈕、氣壓檢測、皮帶編碼器信號等;
20DO:相機(jī)觸發(fā)、破/吸真空、三色燈蜂鳴器等;
EtherCAT接口:接EtherCAT總線驅(qū)動器,控制DELTA并聯(lián)機(jī)械手;
4路單端脈沖輸出:接步進(jìn)/脈沖驅(qū)動器、編碼器軸;
EtherNET接口:千兆網(wǎng)口,接支持Gige協(xié)議的面陣相機(jī),實(shí)現(xiàn)視覺定位、糾偏應(yīng)用。
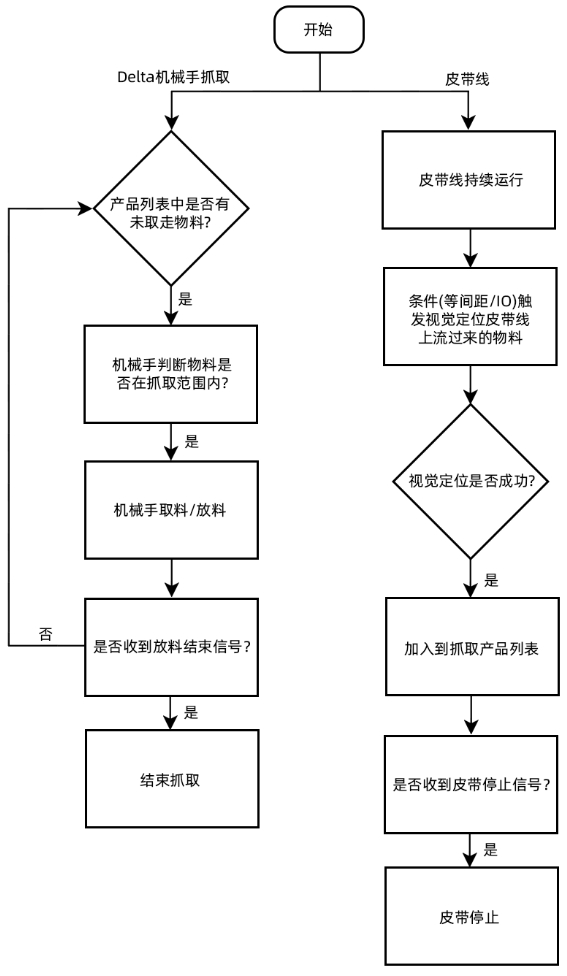
運(yùn)動控制與機(jī)器視覺實(shí)現(xiàn)過程
| 機(jī)器視覺
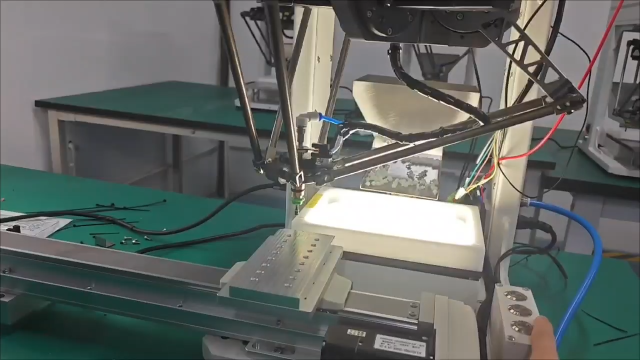
上置工業(yè)相機(jī)對皮帶輸送線上的動態(tài)物料進(jìn)行視覺拍照定位,通過編碼器實(shí)時(shí)反饋的數(shù)據(jù)實(shí)現(xiàn)DELTA機(jī)械手與皮帶線的同步追蹤和抓取。(針對精度要求較高的擺盤或裝配應(yīng)用可配置下置相機(jī),在抓取后執(zhí)行飛拍二次定位糾偏以增加工藝精度)
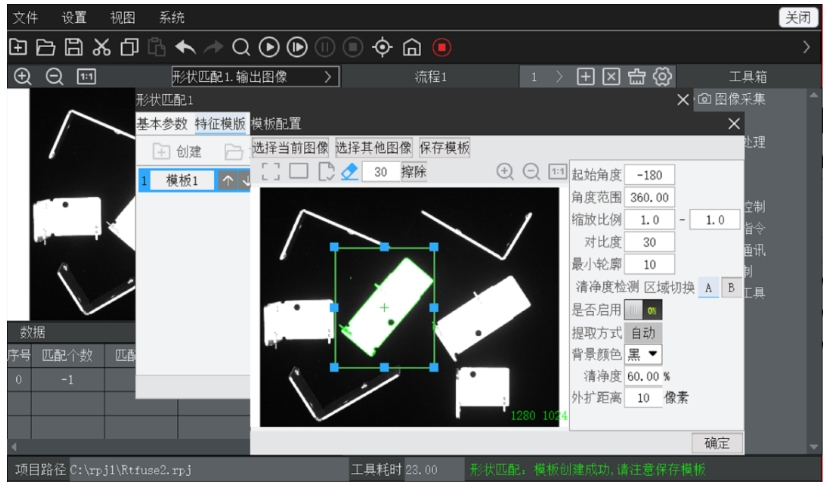
視覺定位主要用到形狀匹配功能,通過預(yù)設(shè)的形狀、尺寸、Mark點(diǎn)等特征,實(shí)現(xiàn)目標(biāo)物料的匹配定位。通過坐標(biāo)系校準(zhǔn),將物料的世界坐標(biāo)傳送給DELTA并聯(lián)機(jī)械手。
| 運(yùn)動控制
零散物料放置在皮帶線上輸送時(shí),控制器通過視覺拍照定位以獲取各物料的空間坐標(biāo)數(shù)據(jù),通過編碼器實(shí)時(shí)反饋的數(shù)據(jù) 驅(qū)動 DELTA并聯(lián)機(jī)械手執(zhí)行動態(tài)抓取作業(yè),將物料精準(zhǔn)放置至預(yù)設(shè)工位。DELTA機(jī)械手基于視覺定位數(shù)據(jù)沿規(guī)劃路徑按序完成物料的拾取與定點(diǎn)放置(方案支持用戶快速示教關(guān)鍵動作節(jié)點(diǎn):拾取、放置、視覺拍攝)。當(dāng)末端執(zhí)行器檢測到當(dāng)前吸嘴無有效標(biāo)簽時(shí),會重新抓取新物料進(jìn)行擺放。
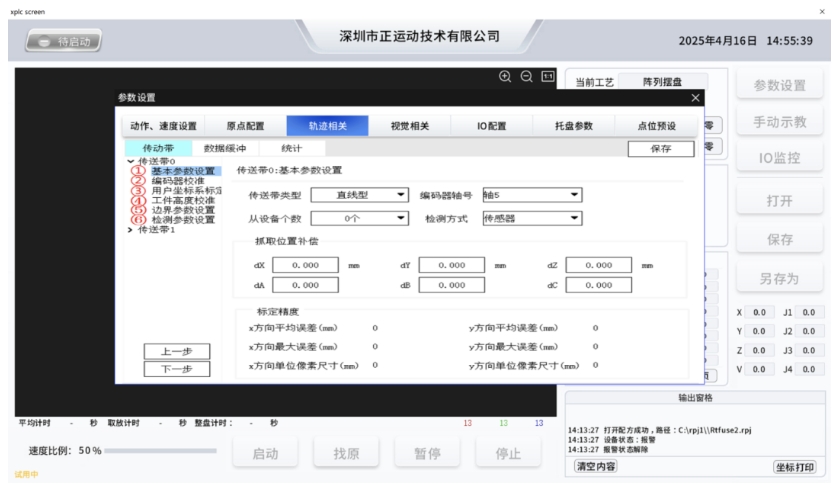
基本參數(shù)設(shè)置
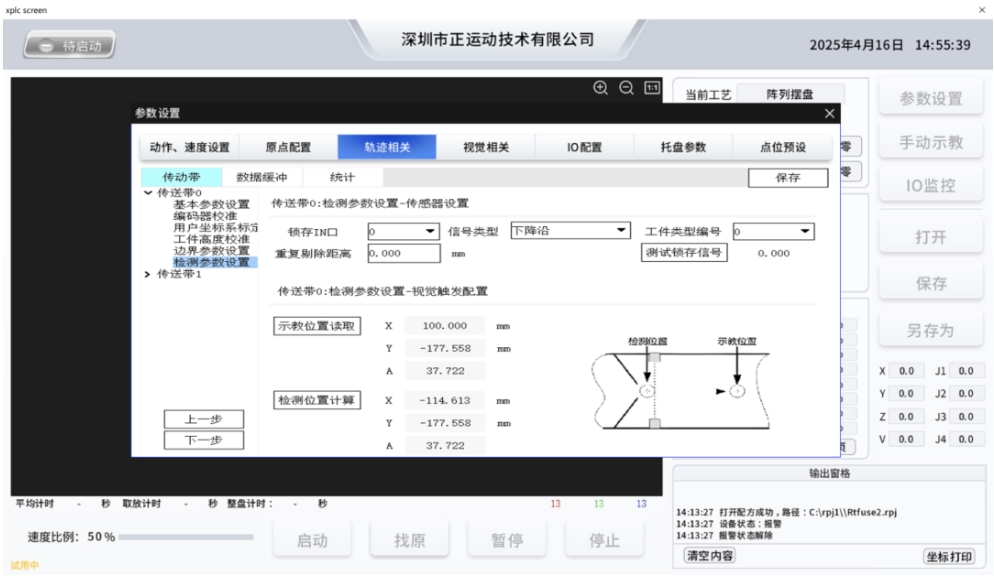
檢測參數(shù)設(shè)置
DELTA并聯(lián)機(jī)械手動態(tài)跟隨抓取流程
方案應(yīng)用優(yōu)勢
技術(shù)門檻低:拖拽式中文組態(tài)視覺,應(yīng)用工程師經(jīng)過簡單培訓(xùn)可輕松上手;
項(xiàng)目開發(fā)周期快:成熟的視覺機(jī)械手動態(tài)抓取解決方案,減少用戶開發(fā)時(shí)間成本;
軟硬件集成性強(qiáng):集成EtherCAT總線、脈沖混合控制,機(jī)器視覺、運(yùn)動控制、集軟硬于一體易于設(shè)備調(diào)試與排除問題;
降低企業(yè)用人成本:一人即可調(diào)試設(shè)備的運(yùn)動控制、視覺、IO邏輯控制等,解決工程人員流失、用人成本高等問題;
柔性化生產(chǎn):系統(tǒng)可保存多個物料的視覺和運(yùn)控配置程序,一鍵完成工藝包切換。可靈活處理不同尺寸和形狀的工件,無需頻繁更換硬件,降低產(chǎn)線停機(jī)時(shí)間。

解決方案硬件配置

02 高集成機(jī)器視覺運(yùn)動控制一體機(jī)VPLC712
正運(yùn)動技術(shù)VPLC712機(jī)器視覺運(yùn)動控制一體機(jī)是一款基于x86架構(gòu)的EtherCAT總線視覺運(yùn)動控制器,采用一體化設(shè)計(jì),將實(shí)時(shí)機(jī)器視覺、運(yùn)動控制、IO和監(jiān)控集成于一臺多核控制器上,實(shí)現(xiàn)多任務(wù)并行實(shí)時(shí)處理自動化設(shè)備任務(wù),通過共享內(nèi)存機(jī)制,將PC部分硬件資源通過MotionRT7進(jìn)行配置,實(shí)現(xiàn)核內(nèi)高速交互,驅(qū)動執(zhí)行器進(jìn)行對應(yīng)操作,完成設(shè)備整體的控制。
VPLC系列機(jī)器視覺運(yùn)動控制一體機(jī)的安裝與拆卸過程便捷,占地空間小,還能與其它控制單元部件(如伺服驅(qū)動器、傳感器、編碼器、控制閥等)無縫集成,提供一個完整端到端的視覺運(yùn)動控制解決方案。
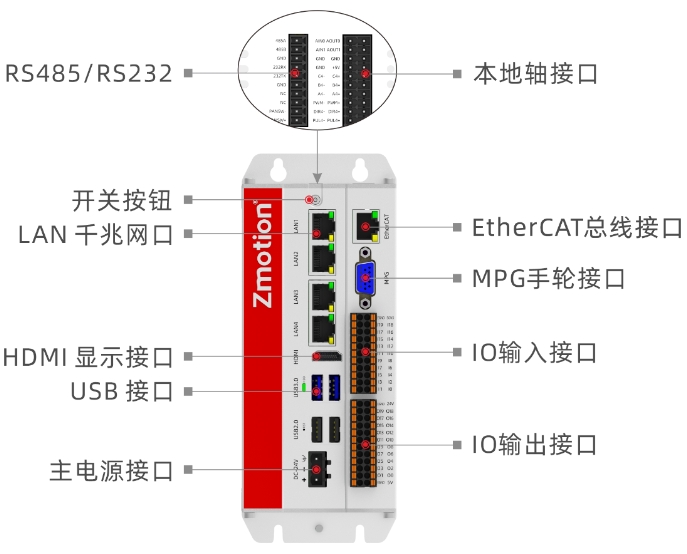
VPLC712機(jī)器視覺運(yùn)動控制一體機(jī),本身最多支持64軸,EtherCAT最小通訊周期可達(dá)到250us;板載20數(shù)字輸入,20數(shù)字輸出以及4路高速鎖存輸入;板載2路本地差分脈沖軸、2路AD和2路DA。
03 RTFuse視覺動態(tài)抓取應(yīng)用

正運(yùn)動針對市場需求,特此基于VPLC系列的視覺運(yùn)動控制一體機(jī)開發(fā)了RTFuse視覺對位貼合解決方案,通過點(diǎn)位示教與RTFuse視覺組態(tài)的結(jié)合,實(shí)現(xiàn)一站式、快速開發(fā)對位貼合設(shè)備,有效縮短項(xiàng)目周期,操作員通過簡單調(diào)整視覺、運(yùn)動控制功能模塊參數(shù),即可在最短時(shí)間內(nèi)完成物料轉(zhuǎn)換,實(shí)現(xiàn)高速高精的機(jī)械手對位貼合。
▌ 相機(jī)支持
支持市面上大部分主流相機(jī),支持4個相機(jī)并行采集、視覺飛拍。
▌ 快速配置
機(jī)械手、軸組、飛達(dá)供料、相機(jī)和矩陣取料、工具參數(shù)。
▌ 示教功能
提供取料、飛拍及放料路徑等多個點(diǎn)位的一鍵示教功能。
▌ 坐標(biāo)校準(zhǔn)
支持相機(jī)標(biāo)定,包括修改XY坐標(biāo)方向和世界坐標(biāo)位置補(bǔ)正。
▌ 走位標(biāo)定
通過示教好的運(yùn)動點(diǎn)位,一鍵即可完成自動標(biāo)定。
▌ 系統(tǒng)切換
可切換至RTFuse視覺組態(tài)系統(tǒng),實(shí)現(xiàn)視覺檢測流程。
▌ 可視化界面
界面友好,便于用戶數(shù)據(jù)監(jiān)控,實(shí)時(shí)顯示使能狀態(tài)、回原狀態(tài)、定位數(shù)量和擺放計(jì)數(shù)等。
▌ 支持機(jī)械手類型
4軸模組、SCARA機(jī)械手、DELTA并聯(lián)機(jī)械手、直角坐標(biāo)機(jī)械手、6關(guān)節(jié)等。

審核編輯 黃宇
-
運(yùn)動控制器
+關(guān)注
關(guān)注
2文章
444瀏覽量
25144 -
Delta
+關(guān)注
關(guān)注
1文章
30瀏覽量
12638 -
ethercat
+關(guān)注
關(guān)注
19文章
995瀏覽量
39620
發(fā)布評論請先 登錄
視覺運(yùn)控一體機(jī)在DELTA并聯(lián)機(jī)械手動態(tài)跟隨抓取的應(yīng)用 #正運(yùn)動技術(shù) #機(jī)器視覺運(yùn)動控制一體機(jī) #正運(yùn)動

觸控一體機(jī)與毛絨玩具的聯(lián)動,也太可愛了吧 # 觸控一體機(jī)# 瑞芯微# RK3568 #工控一體機(jī) #聯(lián)動
DELTA并聯(lián)機(jī)械手視覺方案榮獲2024年度機(jī)器人應(yīng)用典型案例獎

DELTA并聯(lián)機(jī)械手視覺方案榮獲2024年度機(jī)器人應(yīng)用典型案例獎 #正運(yùn)動技術(shù) #機(jī)器視覺運(yùn)動控制一體機(jī)
工業(yè)一體機(jī)在工業(yè)視覺設(shè)備中的應(yīng)用


國產(chǎn)錄播一體機(jī),性能卓越,高清視頻采集,助力智慧教育新發(fā)展 #人工智能 #電路知識 #國產(chǎn)錄播一體機(jī)
機(jī)器視覺運(yùn)動控制一體機(jī)在DELTA并聯(lián)機(jī)械手視覺上下料應(yīng)用

機(jī)器視覺運(yùn)動控制一體機(jī)在DELTA并聯(lián)機(jī)械手視覺上下料的應(yīng)用#機(jī)器視覺運(yùn)動控制一體機(jī)

工業(yè)一體機(jī)在激光機(jī)械設(shè)備類行業(yè)的應(yīng)用
VPLC系列機(jī)器視覺運(yùn)動控制一體機(jī)在五軸聯(lián)動點(diǎn)膠上的應(yīng)用
工業(yè)一體機(jī)在智能分揀中的應(yīng)用

C#之Delta并聯(lián)機(jī)械手的視覺同步分揀






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論