") 無人機(jī)數(shù)據(jù)鏈發(fā)展歷程,抗干擾技術(shù)所面臨的挑戰(zhàn)
無人機(jī)數(shù)據(jù)鏈發(fā)展歷程,抗干擾技術(shù)所面臨的挑戰(zhàn)

引言
無人機(jī)數(shù)據(jù)鏈承擔(dān)著無人機(jī)指揮控制和信息傳輸?shù)闹匾蝿?wù),是無人機(jī)系統(tǒng)的重要組成部分。近年來,無人機(jī)在軍事和民用領(lǐng)域的廣泛應(yīng)用對(duì)無人機(jī)數(shù)據(jù)鏈在復(fù)雜環(huán)境下的安全性、可靠性和適應(yīng)性提出了更高的要求,本文闡述了軍用和民用領(lǐng)域無人機(jī)數(shù)據(jù)鏈的發(fā)展現(xiàn)狀,總結(jié)了無人機(jī)數(shù)據(jù)鏈面臨的挑戰(zhàn)以及無人機(jī)數(shù)據(jù)鏈抗干擾的關(guān)鍵技術(shù)。
1無人機(jī)數(shù)據(jù)鏈的發(fā)展歷程
由于在無人機(jī)早期發(fā)展過程中軍用無人機(jī)占據(jù)了主導(dǎo)地位,導(dǎo)致了不同國家、不同無人機(jī)平臺(tái)上使用的數(shù)據(jù)鏈類型各異,并且隨著無人機(jī)的發(fā)展,無人機(jī)數(shù)據(jù)鏈在使用的頻帶、調(diào)制方式上也進(jìn)行了數(shù)次重要的改變。
1.1視距數(shù)據(jù)鏈和超視距數(shù)據(jù)鏈
從無人機(jī)與指揮控制站之間的距離是否通視來分類,無人機(jī)數(shù)據(jù)鏈主要分為視距鏈路(RF-LOS)和超視距鏈路(BLOS)。
在視距鏈路類型中,不同的數(shù)據(jù)鏈?zhǔn)褂昧藦牡皖l到C波段之間的不同頻率。而C波段(4 GHz~8 GHz)因不易受到極端天氣的影響從而成為目前大多數(shù)無人機(jī)數(shù)據(jù)鏈采用的頻段,其中下行鏈路使用3.7 GHz~4.2 GHz,上行鏈路使用 5.9 GHz~6.4 GHz。根據(jù)公開的文獻(xiàn)資料顯示,視距鏈路使用C波段的有水手無人機(jī)(Mariner)、捕食者無人機(jī)(Predator)和牽牛星無人機(jī)(Altair)等大型無人機(jī)。而一些小型無人機(jī)的視距鏈路則使用UHF波段(300 MHz~1 000 MHz),比如掃描鷹無人機(jī)(ScanEagle)、地球漫游者無人機(jī)(Georanger)、子午線無人機(jī)(Meridian)、陰影無人機(jī)(Shadow)和大烏鴉無人機(jī)(Raven)。
在超視距鏈路類型中,數(shù)據(jù)鏈?zhǔn)褂玫念l段包括UHF波段、L波段(950 MHz~1 450 MHz)和 Ku波段(12 MHz~18 GHz)。以全球鷹無人機(jī)(Global Hawk)、廣域海上監(jiān)視無人機(jī)(BAMS)和捕食者無人機(jī)(Predator)為代表的長(zhǎng)航時(shí)無人機(jī)使用Ku波段作為超視距鏈路,其中上行鏈路為11.7 GHz~12.7 GHz,下行鏈路為14 GHz~14.5 GHz。而中低航時(shí)的無人機(jī)的超視距鏈路一般使用L波段的衛(wèi)星通信鏈路。
不同無人機(jī)平臺(tái)視距鏈路和超視距鏈路使用的頻段總結(jié)如表1所示。
表1不同種類無人機(jī)使用的頻段
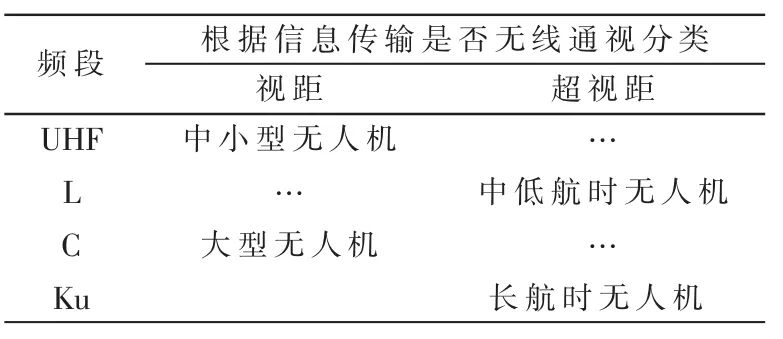
根據(jù)信息傳輸是否無線通視分類頻段UHF LCK u中小型無人機(jī)…大型無人機(jī)視距超視距…中低航時(shí)無人機(jī)…長(zhǎng)航時(shí)無人機(jī)
1.2單載波數(shù)據(jù)鏈和多載波數(shù)據(jù)鏈
從數(shù)據(jù)鏈?zhǔn)褂玫恼{(diào)制方式來分,無人機(jī)數(shù)據(jù)鏈分為單載波傳輸數(shù)據(jù)鏈和多載波傳輸數(shù)據(jù)鏈。
單載波傳輸數(shù)據(jù)鏈的發(fā)展過程中最早出現(xiàn)的數(shù)據(jù)鏈系統(tǒng)是由美國航空無線電公司(ARINC)于 1978年發(fā)展出來的通信尋址與報(bào)告系統(tǒng)(ACARS)。ACARS最早并至今仍用于有人駕駛飛行器與地面控制站的通信中,后來被應(yīng)用于無人機(jī)數(shù)據(jù)鏈系統(tǒng)。ACARS使用了幅度調(diào)制的模擬無線電信號(hào)并工作在高頻(HF)、甚高頻(VHF)和衛(wèi)星通信(SATCOM)頻段。在上個(gè)世紀(jì)90年代,ACARS數(shù)據(jù)鏈系統(tǒng)應(yīng)用了數(shù)字無線電并被稱為甚高頻數(shù)字鏈路(VDL)。VDL依次發(fā)展出了VDL1、VDL2、VDL3、VDL4四個(gè)版本,其中VDL1和VDL3并沒有投入實(shí)際使用,而VDL2用于飛行器和地面控制站之前的通信,而VDL4可以用于飛行器與飛行器之間的通信。由于VHF波段比較擁擠,所以基于VDL2和VDL4,工作在L波段的LDL2和LDL4在后來被學(xué)者提出。
1998年,休斯網(wǎng)絡(luò)系統(tǒng)公司基于全球移動(dòng)通信系統(tǒng)(GSM)發(fā)展了一種擴(kuò)展時(shí)分多址(E-TDMA)數(shù)據(jù)鏈系統(tǒng)。這個(gè)數(shù)據(jù)鏈系統(tǒng)的關(guān)鍵技術(shù)是使用專用和請(qǐng)求式時(shí)隙的多個(gè)服務(wù)質(zhì)量等級(jí)的應(yīng)用,而這一關(guān)鍵技術(shù)被應(yīng)用于采用時(shí)分復(fù)用(TDD)技術(shù)的通用多信道航空通信系統(tǒng)(AMACS)和由歐洲空域航行安全組織(EUROCONTROL)提出的基于L波段的1型數(shù)字航空系統(tǒng)(L-DACS1)。
第三個(gè)單載波傳輸數(shù)據(jù)鏈系統(tǒng)是于 2002年提出的通用接入收發(fā)系統(tǒng) (UAT),UAT工作在978 MHz頻段并使用一個(gè)3 MHz的信道提供峰值速率為1 MHz的服務(wù)。UAT同樣是一個(gè)TDMA系統(tǒng)。
第一個(gè)多載波傳輸數(shù)據(jù)鏈系統(tǒng)是由歐洲第六框架工作組(EP6)提出的寬帶甚高頻(B-VHF)系統(tǒng),該系統(tǒng)工作在118 MHz~137 MHz的甚高頻頻段并使用多載波碼分多址(MC-CDMA)、TDD和正交頻分多路復(fù)用(OFDM)技術(shù),其中每個(gè)子載波的間隔是 2 kHz。因?yàn)閂HF頻段比較擁擠,所以學(xué)者基于B-VHF發(fā)展了工作于L波段的寬帶航空多載波(B-AMC)系統(tǒng),B-AMC摒棄了CDMA技術(shù)而保留了OFDM技術(shù),而考慮工作頻率的增加使多普勒頻移的增加,每個(gè)子載波的間隔擴(kuò)展為10 kHz,且考慮到系統(tǒng)容量,B-AMC使用了應(yīng)用頻分復(fù)用(FDD)技術(shù)的兩個(gè)信道。
第二個(gè)多載波傳輸數(shù)據(jù)鏈?zhǔn)怯呻娮庸I(yè)協(xié)會(huì)(EIA)和通信工業(yè)協(xié)會(huì)(TIA)提出的用于公共安全無線電系統(tǒng)的P34。P34覆蓋了187.5 km的扇形區(qū)域并應(yīng)用了OFDM技術(shù)。
由EUROCONTROL提出的基于L波段的2型數(shù)字航空系統(tǒng)(L-DACS2)是以前兩種多載波傳輸數(shù)據(jù)鏈系統(tǒng)所采用的技術(shù)和WiMAX為基礎(chǔ)、應(yīng)用OFDM技術(shù)的第三種多載波傳輸數(shù)據(jù)鏈。
文獻(xiàn)[5]總結(jié)了用于無人機(jī)的單載波和多載波數(shù)據(jù)鏈的發(fā)展歷程,如圖1所示。
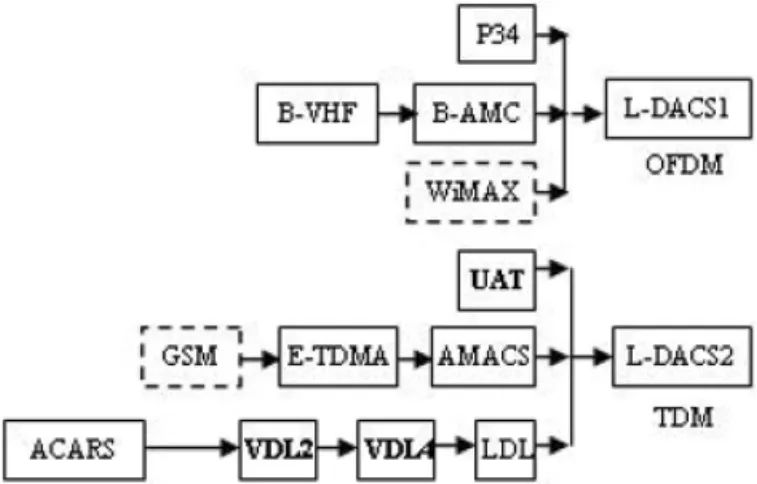
圖1無人機(jī)的單載波和多載波數(shù)據(jù)鏈發(fā)展歷程
2無人機(jī)數(shù)據(jù)鏈抗干擾面臨的挑戰(zhàn)
設(shè)計(jì)無人機(jī)數(shù)據(jù)鏈要比設(shè)計(jì)其他無線通信系統(tǒng)更為復(fù)雜,在抗干擾方面無人機(jī)面臨的挑戰(zhàn)有信息遠(yuǎn)距離傳輸帶來的路徑損耗、傳播途徑中的障礙物造成的衰落、無人機(jī)的高速運(yùn)動(dòng)帶來的多普勒頻移、復(fù)雜的頻譜環(huán)境帶來的干擾和阻塞。
2.1鏈路遠(yuǎn)距離路徑損耗
無人機(jī)數(shù)據(jù)鏈系統(tǒng)所面臨的最嚴(yán)峻的挑戰(zhàn)是信息長(zhǎng)距離的傳輸,長(zhǎng)距離的傳輸會(huì)給數(shù)據(jù)鏈系統(tǒng)的性能帶來以下幾方面的挑戰(zhàn):
(1)功率衰減和頻譜效率的降低。IEEE802.11無線傳輸鏈路也就是俗稱的 WiFi只能覆蓋 100 m范圍,而后來發(fā)展的IEEE802.16也就是俗稱的WiMAX在鄉(xiāng)村地區(qū)可以覆蓋3 km而在城市地區(qū)可以覆蓋1 km,以上的覆蓋范圍同樣適用于3GPP LTE。一般的航空數(shù)據(jù)鏈路要求覆蓋360 km的范圍,所以使用這些傳統(tǒng)的無線通信鏈路來實(shí)施長(zhǎng)距離的測(cè)控和傳輸會(huì)造成嚴(yán)重的功率衰減和極低的頻譜效率。顯示,WiMAX網(wǎng)絡(luò)可以在0.9 km的范圍里實(shí)現(xiàn)3 bps~5 bps/Hz的頻譜效率。對(duì)于遠(yuǎn)距離傳輸而言,頻譜效率將會(huì)更低。
(2)傳輸延遲。信息遠(yuǎn)距離的傳輸還會(huì)造成嚴(yán)重的來回傳輸時(shí)間的延遲而使通信保護(hù)時(shí)隙大大增加。相比于WiMAX網(wǎng)絡(luò)在 5 km范圍內(nèi) 17 μs的延遲最低要求,電磁波單向傳輸360 km則需要1.2 ms。
(3)此外,信息的長(zhǎng)距離傳輸會(huì)增加系統(tǒng)誤碼率、減少接收機(jī)信噪比、增加數(shù)據(jù)包的丟失概率。
2.2無人機(jī)平臺(tái)的高速運(yùn)動(dòng)
無人機(jī)的高速運(yùn)動(dòng)可以給接收機(jī)帶來多普勒頻移,而多普勒頻移的大小和運(yùn)動(dòng)速度成正比而和波長(zhǎng)成反比。可以計(jì)算出L-DACS1在速率為600 km/h以及工作頻段為1 164 MHz時(shí)的多普勒頻移為1 213 Hz,而WiMAX在速率為 100 km/h以及工作頻段為 2.5 GHz時(shí)的多普勒頻移為231.5 Hz。因?yàn)殡姶挪l率和波長(zhǎng)成反比,因此對(duì)于高速運(yùn)動(dòng)狀態(tài)的無人機(jī)而言,工作頻段越低多普勒頻移越小,但是低頻段的頻譜資源又非常緊張,所以無人機(jī)的高速運(yùn)動(dòng)帶來的多普勒頻移對(duì)無人機(jī)數(shù)據(jù)鏈來說是一個(gè)很大的挑戰(zhàn)。
2.3鏈路中障礙物引起的衰落
無人機(jī)數(shù)據(jù)鏈應(yīng)用的主要頻段為微波(300 MHz~3 000 GHz),因?yàn)槲⒉ㄦ溌酚懈叩目捎脦挘俏⒉l率高、波長(zhǎng)很短,沒有繞射功能。鏈路的這種特點(diǎn)會(huì)給通信造成以下挑戰(zhàn):
(1)陰影衰落。無人機(jī)數(shù)據(jù)鏈在通信過程中遇到的障礙物可以部分或者全部地阻擋信號(hào)的傳輸而造成嚴(yán)重的陰影衰落。
(2)多徑衰落。從更小的尺度上,由于電磁波通過障礙物時(shí)的散射和反射而造成的接收機(jī)接收到來自不同路徑的同一信號(hào)的不同副本的相位不同,由此造成無線信號(hào)多徑衰落。由于無人機(jī)數(shù)據(jù)鏈在動(dòng)態(tài)變化,副本間的相位差也在動(dòng)態(tài)變化,所以無法使用傳統(tǒng)靜態(tài)無線通信中加入一個(gè)衰落開銷的方式來消除多徑衰落。
(3)此外,多徑衰落會(huì)造成嚴(yán)重的碼間干擾。
2.4人為非惡意干擾和惡意干擾
非惡意干擾是指頻譜環(huán)境中存在的其他設(shè)備的無線電信號(hào)對(duì)無人機(jī)數(shù)據(jù)鏈產(chǎn)生的干擾,而惡意干擾主要存在于軍用領(lǐng)域中,主要分壓制式干擾和欺騙式干擾。
(1)壓制式干擾是指干擾機(jī)持續(xù)發(fā)射的干擾信號(hào)功率大于無人機(jī)數(shù)據(jù)鏈的信號(hào)功率,使數(shù)據(jù)鏈中的通信節(jié)點(diǎn)不能正確接收射頻信號(hào),導(dǎo)致通信鏈路中斷的一種人為通信干擾。壓制式干擾類型按干擾信號(hào)的形式通常可以分為三類:?jiǎn)晤l干擾、窄帶干擾和寬帶干擾。由于壓制式干擾從功率上淹沒期望信號(hào),或者阻塞射頻前端,因此其調(diào)制信息無關(guān)緊要。
(2)而欺騙式干擾采用跟無人機(jī)數(shù)據(jù)鏈信號(hào)結(jié)構(gòu)相似的信號(hào)作為欺騙信號(hào),因此可以不被察覺地誘導(dǎo)接收機(jī)捕獲跟蹤欺騙信號(hào),從而達(dá)到降低其抗干擾性能的目的,并可采用與數(shù)據(jù)鏈信號(hào)近似的功率,避免因功率過大被檢測(cè)出來以及降低干擾成本。實(shí)際應(yīng)用中,如軍事領(lǐng)域接收機(jī)常常面臨高動(dòng)態(tài)、弱信號(hào)、強(qiáng)干擾或信號(hào)遮擋等復(fù)雜多變的環(huán)境,這時(shí)接收機(jī)會(huì)失鎖轉(zhuǎn)而捕獲欺騙信號(hào)或者跟蹤中受到欺騙信號(hào)的影響增大從而整個(gè)系統(tǒng)受到影響。
2.5擁擠的頻譜環(huán)境
頻譜資源緊缺,不可避免地受到外部干擾信號(hào)威脅。傳統(tǒng)的無人機(jī)數(shù)據(jù)鏈?zhǔn)褂肏F、VHF頻段和SATCOM頻段,但是SATCOM頻段不能保證每個(gè)數(shù)據(jù)傳輸階段都可以使用,而HF和VHF變得越來越擁擠。在國內(nèi),根據(jù)工業(yè)和信息化部頒布的無人駕駛航空器頻率使用要求,可使用頻段:840.5 MHz~845 MHz、1 430 MHz~1 444 MHz和2 408 MHz~2 440 MHz,頻譜資源緊缺,不可避免地受到外部干擾信號(hào)威脅。
3無人機(jī)數(shù)據(jù)鏈抗干擾的關(guān)鍵技術(shù)
無人機(jī)數(shù)據(jù)鏈面臨的挑戰(zhàn)要求無人機(jī)數(shù)據(jù)鏈具備以下能力:
(1)廣泛的頻譜管理、分配能力:可以在任意區(qū)域、任意時(shí)間對(duì)無人機(jī)動(dòng)態(tài)分配可用的頻譜資源。
(2)解決因信息長(zhǎng)距離傳輸而造成的功率大規(guī)模衰減的能力。
(3)避開并避免非惡意干擾的能力。
(4)抵抗惡意干擾的能力。
本節(jié)總結(jié)了文獻(xiàn)中無人機(jī)數(shù)據(jù)鏈在面臨以上諸多挑戰(zhàn)和需求時(shí)可用的抗干擾技術(shù)的研究。研究應(yīng)用于無人機(jī)數(shù)據(jù)鏈的抗干擾技術(shù)主要分為三類:提高系統(tǒng)可靠性和有效性的相關(guān)技術(shù)、基于協(xié)作通信技術(shù)以及基于認(rèn)知無線電的抗干擾技術(shù)。
3.1提高通信可靠性和有效性的無人機(jī)數(shù)據(jù)鏈相關(guān)抗干擾技術(shù)
這些相關(guān)技術(shù)包括多輸入多輸出(MIMO)系統(tǒng)的性能評(píng)估,信息傳輸策略,以及蜂窩系統(tǒng)和其他無線通信系統(tǒng)的使用。集中于物理層和鏈路層的技術(shù)研究重點(diǎn)有:
(1)低功耗MIMO系統(tǒng)的集成。
(2)以擴(kuò)頻和跳頻技術(shù)為代表的抗干擾技術(shù)的研究和使用。
(3)有限頻譜資源限制下,高吞吐量、高可靠性的物理層和MAC層協(xié)議和策略。
(4)無人機(jī)數(shù)據(jù)鏈系統(tǒng)和衛(wèi)星通信系統(tǒng)以及其他無線通信系統(tǒng)的整合。
3.2基于協(xié)作通信的無人機(jī)數(shù)據(jù)鏈抗干擾技術(shù)
提出了多信源條件下的協(xié)作通信方式,仿真結(jié)果表明該方案減小了接收信號(hào)的誤碼率;在動(dòng)態(tài)傳輸速率條件下,該方案的傳輸可靠性更高。多信源協(xié)同通信的研究為UAV數(shù)據(jù)鏈的多鏈路協(xié)同信息傳輸指明了方向。在協(xié)同通信的基礎(chǔ)上提出了異步協(xié)同信息傳輸?shù)姆绞剑謩e從物理層(構(gòu)建三維空間的異步協(xié)作傳輸模式)和鏈路層(通過多鏈路協(xié)同轉(zhuǎn)發(fā)協(xié)議)來增強(qiáng)信息傳輸?shù)目煽啃浴G罢咴谖锢韺映浞掷萌N空間分集技術(shù),提高了分集增益,使抗干擾能力有了大幅度的提升;后者在鏈路層通過單發(fā)多收和基于隨機(jī)同步競(jìng)爭(zhēng)窗的自舉應(yīng)答算法來消除鏈路短時(shí)變化的影響,獲得了更佳的網(wǎng)絡(luò)抵達(dá)率和能量效率,增強(qiáng)了傳輸可靠性,提高了抗干擾能力。提出了一種在因接收機(jī)和發(fā)射機(jī)相對(duì)運(yùn)動(dòng)或者環(huán)境變化較快時(shí)產(chǎn)生的過時(shí)信道狀態(tài)信息下協(xié)作通信中繼選擇方法,選擇最優(yōu)的中繼可以在一定程度上抵抗對(duì)協(xié)作通信系統(tǒng)的干擾。提出了一種基于MAP準(zhǔn)則的信道狀態(tài)信息預(yù)測(cè)技術(shù)來提升協(xié)作通信系統(tǒng)的抗干擾能力。
3.3基于認(rèn)知無線電的無人機(jī)數(shù)據(jù)鏈抗干擾技術(shù)
另外,為了解決頻譜資源短缺和隨著無人機(jī)廣泛使用用戶頻譜管理難度增加的問題,應(yīng)用于無人機(jī)頻譜感知和系統(tǒng)重構(gòu)的認(rèn)知無線電技術(shù)被研究。針對(duì)無人機(jī)數(shù)據(jù)鏈在地理環(huán)境、氣象環(huán)境、電磁環(huán)境等構(gòu)成的復(fù)雜環(huán)境中受干擾程度提出一種結(jié)合支持向量機(jī)與功率準(zhǔn)則的預(yù)測(cè)評(píng)估方法,預(yù)測(cè)的結(jié)果可用于無人機(jī)數(shù)據(jù)鏈的重構(gòu)。提出了一種基于認(rèn)知無線電技術(shù)的無人機(jī)數(shù)據(jù)鏈通信系統(tǒng),作者設(shè)計(jì)了一個(gè)認(rèn)知引擎,將信噪比、信道估計(jì)結(jié)果、頻譜感知結(jié)果、多普勒頻移等作為輸入,通過設(shè)計(jì)的認(rèn)知引擎,輸出無人機(jī)系統(tǒng)重構(gòu)后的通信參數(shù)以及由輸入判斷系統(tǒng)遭遇的情況種類。分析當(dāng)前無人機(jī)數(shù)據(jù)鏈面臨問題的基礎(chǔ)上,提出了基于認(rèn)知無線電的無人機(jī)智能數(shù)據(jù)鏈的概念及其內(nèi)涵,描述了無人機(jī)智能數(shù)據(jù)鏈的工作過程,給出了無人機(jī)智能數(shù)據(jù)鏈的指標(biāo)體系以及功能分級(jí)。在確定無人機(jī)數(shù)據(jù)鏈功能的基礎(chǔ)上,提出了無人機(jī)智能數(shù)據(jù)鏈的體系結(jié)構(gòu)。提出了一種基于狀態(tài)機(jī)的無人機(jī)數(shù)據(jù)鏈多參數(shù)規(guī)劃方法,該方法為無人機(jī)數(shù)據(jù)鏈重構(gòu)提供了一種可行有效的思路。
4結(jié)論
隨著無人機(jī)在各領(lǐng)域越來越廣泛的應(yīng)用,無人機(jī)數(shù)據(jù)鏈面臨著諸如頻譜資源緊張、頻譜環(huán)境復(fù)雜、容易受到環(huán)境干擾和人為干擾影響等挑戰(zhàn)。傳統(tǒng)的擴(kuò)頻通信無法滿足無人機(jī)通信鏈路可靠性的要求,因此,需要更靈活、適應(yīng)能力更強(qiáng)的抗干擾方法來提高無人機(jī)抗干擾能力,保證通信鏈路質(zhì)量。目前,在物理層和鏈路層提高系統(tǒng)容量和魯棒性的各種抗干擾技術(shù),協(xié)作通信技術(shù)以及認(rèn)知無線電技術(shù)被研究、并逐步應(yīng)用于無人機(jī)數(shù)據(jù)鏈,利用感知頻譜環(huán)境并進(jìn)行系統(tǒng)重構(gòu)的技術(shù)將是無人機(jī)數(shù)據(jù)鏈智能抗干擾的主要發(fā)展方向。
-
無線電
+關(guān)注
關(guān)注
61文章
2174瀏覽量
117981 -
無人機(jī)
+關(guān)注
關(guān)注
231文章
10843瀏覽量
186768
原文標(biāo)題:無人機(jī)數(shù)據(jù)鏈抗干擾技術(shù)發(fā)展綜述
文章出處:【微信號(hào):ittbank,微信公眾號(hào):ittbank】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
愛普生M-G370PDF復(fù)雜地形下無人機(jī)飛行的卓越應(yīng)用

低空物流:無人機(jī)開啟未來配送新篇章
淺談反無人機(jī)技術(shù)的核心原理
如何通過PCB優(yōu)化提升無人機(jī)信號(hào)穩(wěn)定性?
3000W激光反制無人機(jī)系統(tǒng) - 全天候守護(hù)重點(diǎn)區(qū)域安全防線
《手把手教你做星閃無人機(jī)—KaihongOS星閃無人機(jī)開發(fā)實(shí)戰(zhàn)》系列課程課件匯總
無人機(jī)行業(yè)對(duì)溫度沖擊試驗(yàn)的需求及環(huán)境挑戰(zhàn)
突破帶寬與延遲! 無人機(jī)對(duì)決從電子干擾到“撒網(wǎng)”與“竹竿捅機(jī)”的奇招轉(zhuǎn)變

AI無人機(jī)機(jī)遇與挑戰(zhàn)并存
無人機(jī)自動(dòng)巡檢系統(tǒng)技術(shù)革新與應(yīng)用前景
無人機(jī)光伏巡檢系統(tǒng)的崛起于挑戰(zhàn)

高幀頻圖像識(shí)別反無人機(jī) 慧視有辦法!
低空經(jīng)濟(jì)——無人機(jī)避撞技術(shù)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論