") 助力dSPACE實現(xiàn)基于GNSS的駕駛功能的HIL仿真 ,加速自動駕駛測試革命!
助力dSPACE實現(xiàn)基于GNSS的駕駛功能的HIL仿真 ,加速自動駕駛測試革命!

概述
世界知名的模擬與驗證方案廠商dSPACE借助GNSS模擬器實現(xiàn)了一套基于GNSS的駕駛功能HIL仿真系統(tǒng),該系統(tǒng)可以用于自動駕駛、車聯(lián)網(wǎng)、智能座艙等各類汽車行業(yè)應用,并具備極大的靈活性與多功能,適用于各類復雜場景測試。
關于dSPACE
dSPACE是一個在模擬和驗證領域有著全球影響力的公司,也是航空航天和國防領域的創(chuàng)新領導者。dSPACE提供了一系列的模擬和驗證解決方案,涵蓋了從初始想法到支持系列生產(chǎn)的整個創(chuàng)新鏈。dSPACE的模擬和驗證解決方案可以應用于自動駕駛、電動汽車、電機、電池系統(tǒng)、燃料電池、功率電子元件、充電基礎設施等領域。dSPACE還提供了不同類型的模擬模型,支持從功能設計到ECU測試的所有開發(fā)階段。

方案介紹
GNSS信號對于自動駕駛的重要性在于它可以提供精確、可用和可靠的定位解決方案,無論是V2X通信還是自動駕駛功能測試等許多應用都需要衛(wèi)星支持的車輛位置檢測能力。
但是不同GNSS系統(tǒng)的可用性各不相同,并且全球?qū)Ш叫l(wèi)星系統(tǒng)(GNSS)信號的質(zhì)量容易受到各類地形影響(如峽谷,密集城市,立交橋),此外信號可能受到無意干擾、故意干擾或惡意欺騙的影響。為了確保各種測試場景中應用程序日常使用的穩(wěn)健性和適用性,需要借助更為穩(wěn)定且性能優(yōu)秀的GNSS模擬器。

方案構成
整個系統(tǒng)由以下部分組成:
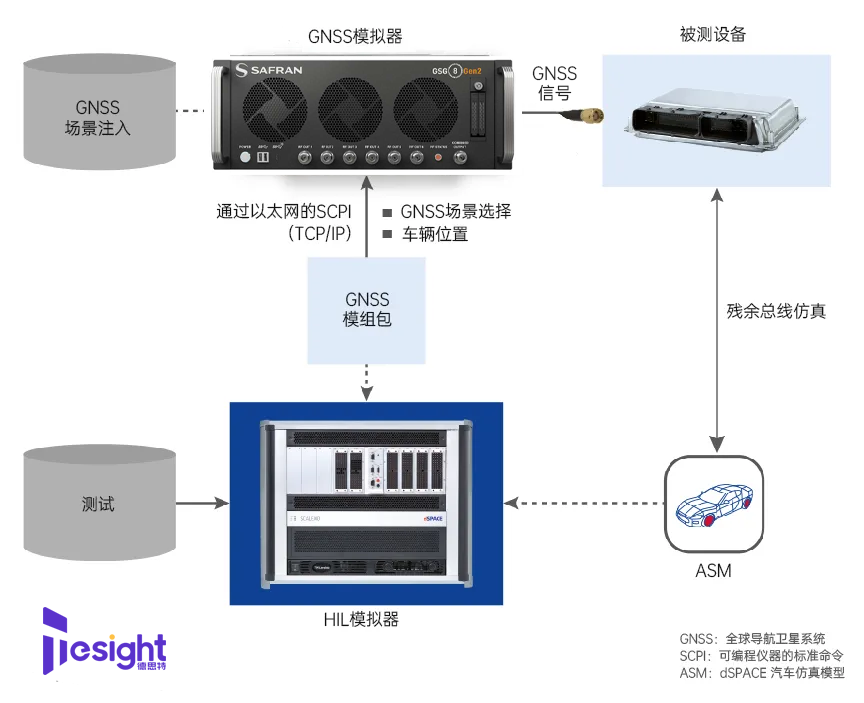
●HIL模擬器:具有汽車仿真模型(ASM)的HIL系統(tǒng),用于模擬車輛和交通
●GNSS blockset:用于控制全球?qū)Ш叫l(wèi)星系統(tǒng)(GNSS)信號發(fā)生器的專用 GNSS 模擬器接口模塊組
●GNSS模擬器GSG-8 GEN2:根據(jù)當前提供的地理位置等信息生成具有特定要求的GNSS場景,并以射頻信號的形式提供車輛位置數(shù)據(jù)
●汽車仿真模型(ASM):ASM是一個用于模擬內(nèi)燃機、車輛動力學、電氣元件和交通環(huán)境的工具套件。開放式Simulink模型用于基于模型的功能開發(fā)以及硬件在環(huán)(HIL)模擬器上的ECU測試
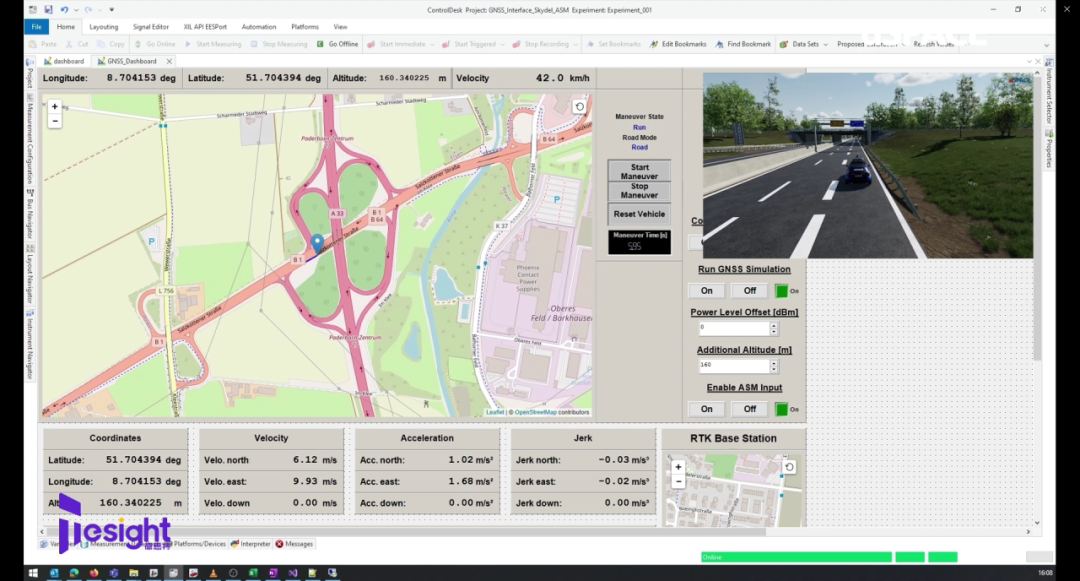
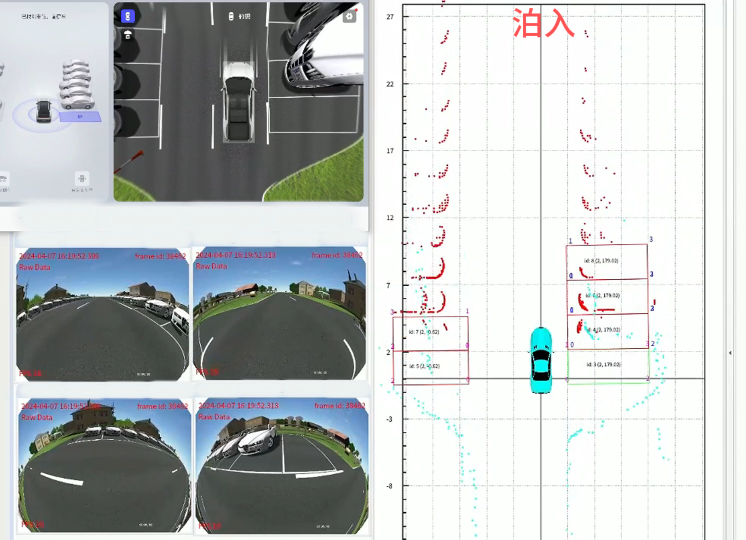
在該方案中,HIL模擬器可以指定3D路徑與相關場景(右上角),可在HIL模擬器中提供給位置信息(經(jīng)度、緯度、高度)、三軸速度、三軸加速度、三軸加加速度等信息(下方),并且可選的能夠使用dSPACE ASM選件提供三軸角速度等姿態(tài)信息,將這些信息實時傳輸給GNSS模擬器,并將其仿真出來,經(jīng)由射頻傳輸給待測件。
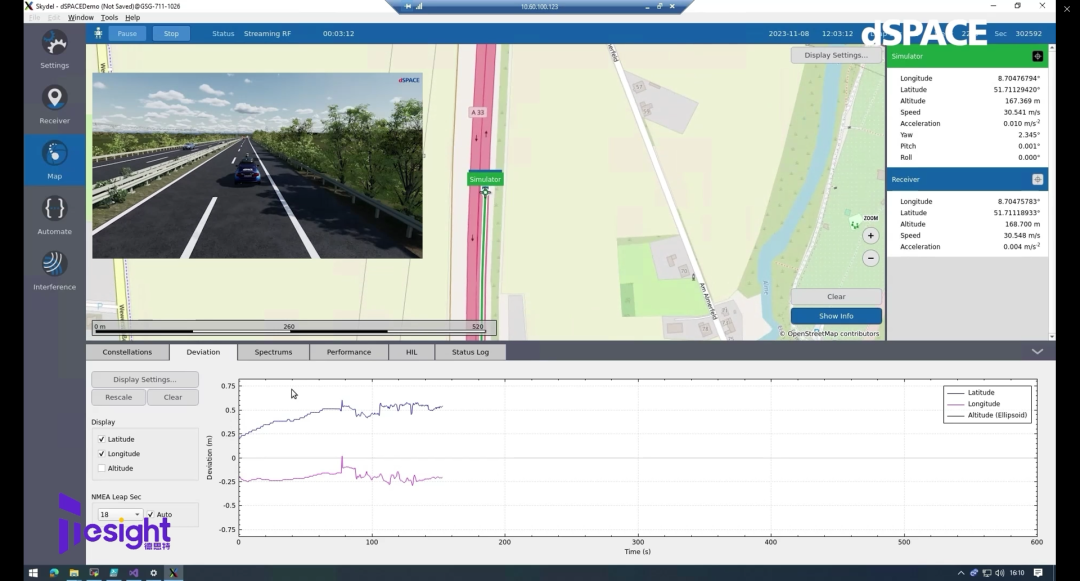
在GNSS仿真過程中,我們可以實時觀測GNSS模擬器與GNSS待測件的仿真數(shù)據(jù)(右側),并觀測定位誤差與仿真位置等。仿真過程中,實時監(jiān)測GNSS模擬器與待測件的交互數(shù)據(jù),分析定位誤差、對比仿真位置與實際位置,實現(xiàn)對性能的精準評估。
借助此方案,GNSS待測件接入到3D仿真場景的HIL模型中。通過這種方式,在HIL仿真場景內(nèi),能夠較為完備地測試待測件的性能和功能。無需在實際道路上進行大量復雜的測試,就可以模擬出多樣化的行駛場景和環(huán)境條件,極大地提高了測試效率,同時也能更精準地評估GNSS待測件在不同情況下的表現(xiàn),為其優(yōu)化和改進提供有力的數(shù)據(jù)支撐。
成效
借助GNSS模擬器,可以完成高性能的地理位置與衛(wèi)星信號的模擬,將GNSS信號發(fā)生器集成到仿真環(huán)境中并連接到dSPACE汽車仿真模型(ASM)后,模塊組就會選擇預定義的GNSS場景并控制信號發(fā)生器。在典型的測試中,起始位置、日期、路線、車輛的駕駛操作等首先在ASM模型中進行參數(shù)化,然后選擇所需的GNSS場景,例如特定的衛(wèi)星星座(GPS、伽利略、格洛納斯、北斗等)和信號衰減,在執(zhí)行測試時,HIL模擬器不斷將車輛的位置數(shù)據(jù)發(fā)送到信號發(fā)生器,信號發(fā)生器根據(jù)GNSS場景進行準備,并將其作為真實的射頻信號提供給待測設備。
審核編輯 黃宇
-
仿真
+關注
關注
52文章
4283瀏覽量
135792 -
HIL
+關注
關注
2文章
66瀏覽量
17978 -
dSPACE
+關注
關注
8文章
35瀏覽量
20785 -
GNSS
+關注
關注
9文章
872瀏覽量
49354
發(fā)布評論請先 登錄
康謀分享 | 基于多傳感器數(shù)據(jù)的自動駕駛仿真確定性驗證


搭建完整的ADAS測試鏈路,推動自動駕駛技術的安全發(fā)展
新能源車軟件單元測試深度解析:自動駕駛系統(tǒng)視角
智能駕駛HIL仿真測試解決方案

一文聊聊自動駕駛測試技術的挑戰(zhàn)與創(chuàng)新

基于V2X和自動駕駛HIL聯(lián)調(diào)的仿真測試系統(tǒng)開發(fā)

GNSS仿真中的HiL延遲:挑戰(zhàn)、影響與解決方案深度剖析

自動駕駛HiL測試方案案例分析--ADS HiL測試系統(tǒng)#ADAS #自動駕駛 #VTHiL








 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論