") LabVIEW運(yùn)動控制(三):EtherCAT運(yùn)動控制器的高效加工指令自定義封裝
LabVIEW運(yùn)動控制(三):EtherCAT運(yùn)動控制器的高效加工指令自定義封裝
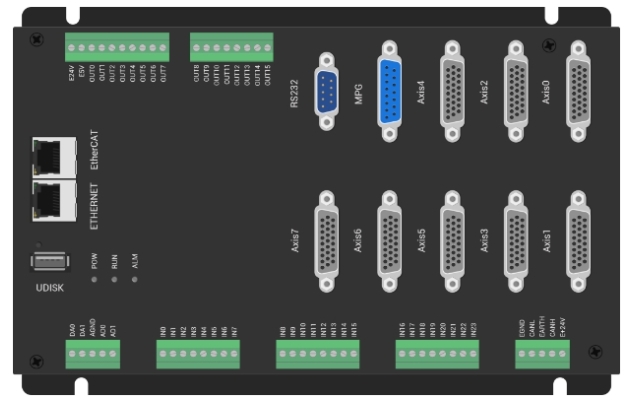
ZMC408CE 高性能總線型運(yùn)動控制器
ZMC408CE是正運(yùn)動推出的一款多軸高性能EtherCAT總線運(yùn)動控制器,具有EtherCAT、EtherNET、RS232、CAN和U盤等通訊接口,ZMC系列運(yùn)動控制器可應(yīng)用于各種需要脫機(jī)或聯(lián)機(jī)運(yùn)行的場合。
ZMC408CE支持PLC、Basic、HMI組態(tài)三種編程方式。PC上位機(jī)API編程支持C#、C++、LabVIEW、Matlab、Qt、Linux、VB.Net、Python等接口。

ZMC408CE硬件功能特性:
1.支持8軸運(yùn)動控制(脈沖+EtherCAT總線),EtherCAT同步周期可快至125us;
2.24路通用輸入、16路通用輸出,模擬量AD/DA各兩路;
3.8路10MHz高速差分脈沖輸出,總線軸、脈沖軸可混合插補(bǔ);
4.高性能處理器,提升運(yùn)算速度、響應(yīng)時間和掃描周期等;
5.一維/二維/三維、多通道視覺飛拍,高速高精;
6.位置同步輸出PSO,連續(xù)軌跡加工中對精密點膠膠量控制和激光能量控制等;
7.多軸同步控制,多坐標(biāo)系獨立控制等;
8.直線插補(bǔ)、任意空間圓弧插補(bǔ)、螺旋插補(bǔ)、樣條插補(bǔ)等;
9.應(yīng)用靈活,可PC上位機(jī)開發(fā),也可脫機(jī)獨立運(yùn)行;
ZMC408CE視頻介紹,點擊→“高性能EtherCAT總線運(yùn)動控制器,帶你玩轉(zhuǎn)“8通道獨立PSO”應(yīng)用場景”查看。
更多關(guān)于ZMC408CE的詳情介紹,點擊“推薦|8通道PSO的高性能EtherCAT總線運(yùn)動控制器”查看。
PCIE464M PCIe EtherCAT總線運(yùn)動控制卡
PCIE464M是一款基于PCIe的PCI Express的EtherCAT總線運(yùn)動控制卡,具有多項實時和高精度運(yùn)動控制控制功能。
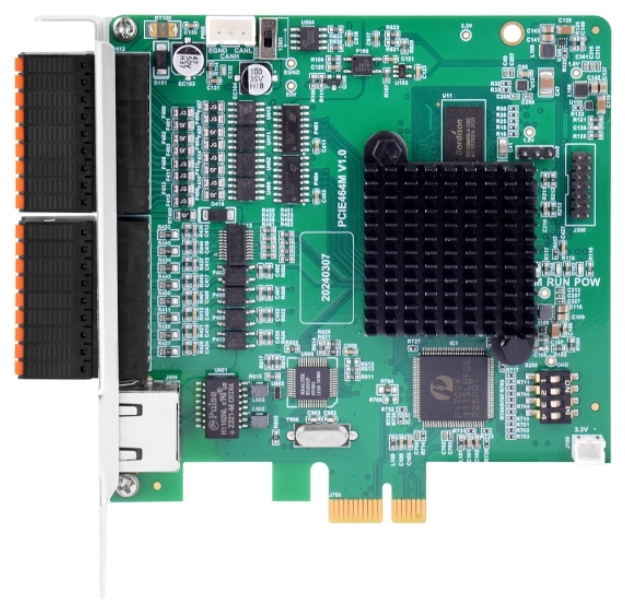
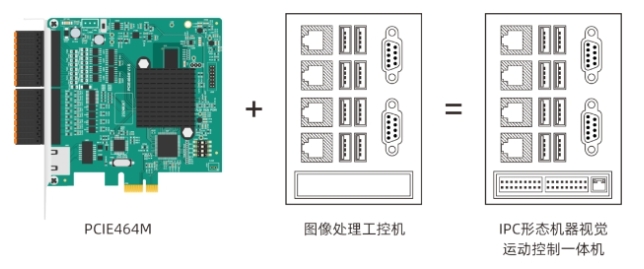
PCIE464M運(yùn)動控制卡上自帶16進(jìn)16出,第三方圖像處理工控機(jī)或PC無需額外配置IO數(shù)據(jù)采集卡和PLC,即可實現(xiàn)IPC形態(tài)的機(jī)器視覺運(yùn)動控制一體機(jī),簡化硬件架構(gòu),節(jié)省成本,軟硬件一體化。
PCIE464M硬件功能特性:
1.可選6-64軸運(yùn)動控制,支持EtherCAT總線/脈沖/步進(jìn)伺服驅(qū)動器;
2.聯(lián)動軸數(shù)最高可達(dá)16軸,運(yùn)動周期最小為100μs;
3.標(biāo)配16進(jìn)16出,其中4路高速鎖存輸入、4路高速PWM和12路高速硬件比較輸出PSO;
4.支持PWM輸出、1D/2D/3D PSO硬件位置比較輸出、視覺飛拍、連續(xù)軌跡插補(bǔ)等;
5.支持30+機(jī)械手模型正逆解模型算法,比如SCARA、Delta、UVW、4軸/5軸 RTCP...;
6.支持掉電存儲和掉電中斷,多重加密,提供程序更安全機(jī)制;
7.8路單端脈沖軸、4路單端編碼器軸;
8.具有一維、二維螺距補(bǔ)償控制,實現(xiàn)更高的加工精度;
PCIE464M視頻介紹,點擊→“超高速PCle EtherCAT控制卡PCIE464M,即刻提升高速高精智能裝備生產(chǎn)力!”查看。
更多關(guān)于PCIE464M的詳情介紹,點擊“PCIE464M-高速高精,超高速PCIe EthrtCAT實時運(yùn)動控制卡”查看。
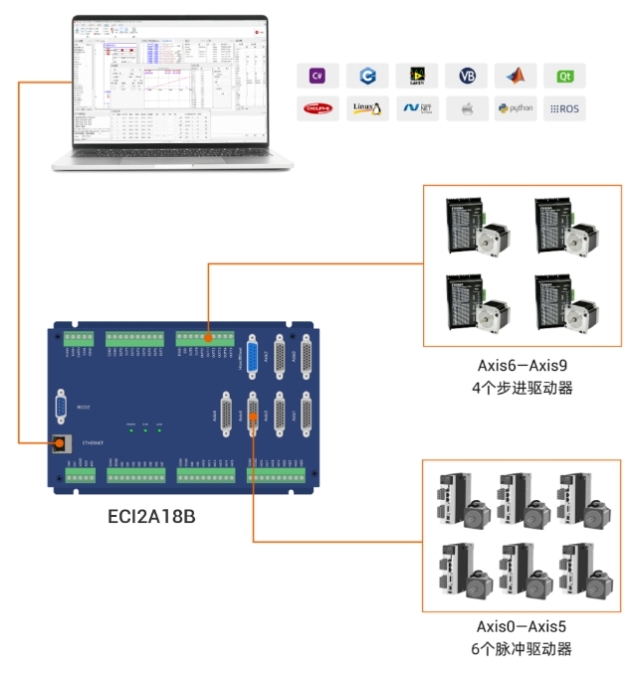
ECI2A18B 高性價比10軸運(yùn)動控制卡
ECI2A18B是正運(yùn)動推出的一款高性價比10軸脈沖型、模塊化的網(wǎng)絡(luò)型運(yùn)動控制卡,采用優(yōu)化的網(wǎng)絡(luò)通訊協(xié)議可以實現(xiàn)實時的運(yùn)動控制,同時支持多種通信協(xié)議,方便與其他工業(yè)控制設(shè)備連接和集成。安裝配置相對便捷,適合于模塊化和靈活性要求較高的控制系統(tǒng)。
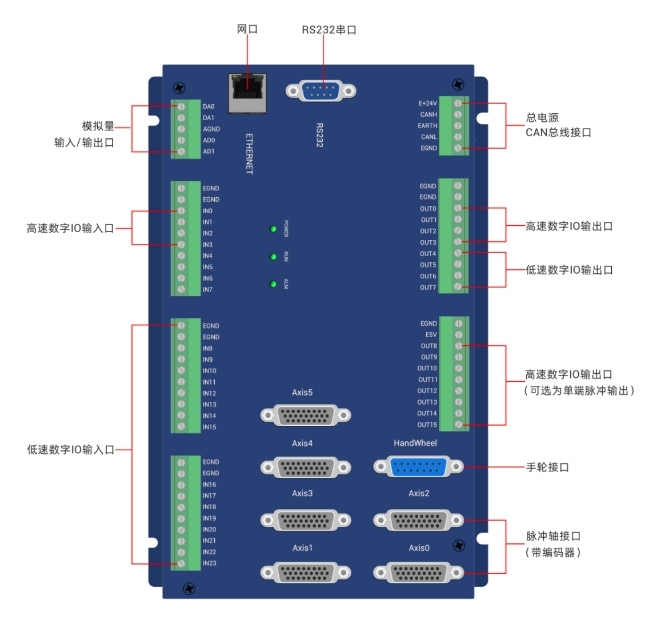
ECI2A18B控制卡最大可擴(kuò)展至12脈沖軸,支持8路高速輸入和4路高速輸出,集成豐富的運(yùn)動控制功能,包含多軸點位運(yùn)動、電子凸輪,直線插補(bǔ),圓弧插補(bǔ),連續(xù)插補(bǔ)運(yùn)動等,滿足多樣化的工業(yè)應(yīng)用需求。
ECI2A18B硬件功能特性:
1.支持6路差分脈沖軸+4路單端脈沖軸運(yùn)動控制;
2.支持1路專用的手輪輸入接口;
3.差分脈沖軸最大輸出脈沖頻率10MHz;
4.標(biāo)配24+12進(jìn)16+6出,其中支持4路高速鎖存,4路高速PWM,2路高速硬件比較輸出PSO(可選支持HW2功能);
5.可支持RTSys+其他高級上位機(jī)編程語言的混合編程支持;
6.支持RTBasic多任務(wù)編程;
ECI2A18B視頻介紹,點擊→“【加量不加價】高性價比十軸脈沖運(yùn)動控制卡ECI2A18B 讓您的設(shè)備在自動化行業(yè)內(nèi)卷中脫穎而出!”查看。
更多關(guān)于ECI2A18B的詳情介紹,點擊“【加量不加價】正運(yùn)動網(wǎng)絡(luò)型運(yùn)動控制卡ECI2618B/ECI2A18B”查看。
??? LabVIEW進(jìn)行項目開發(fā)
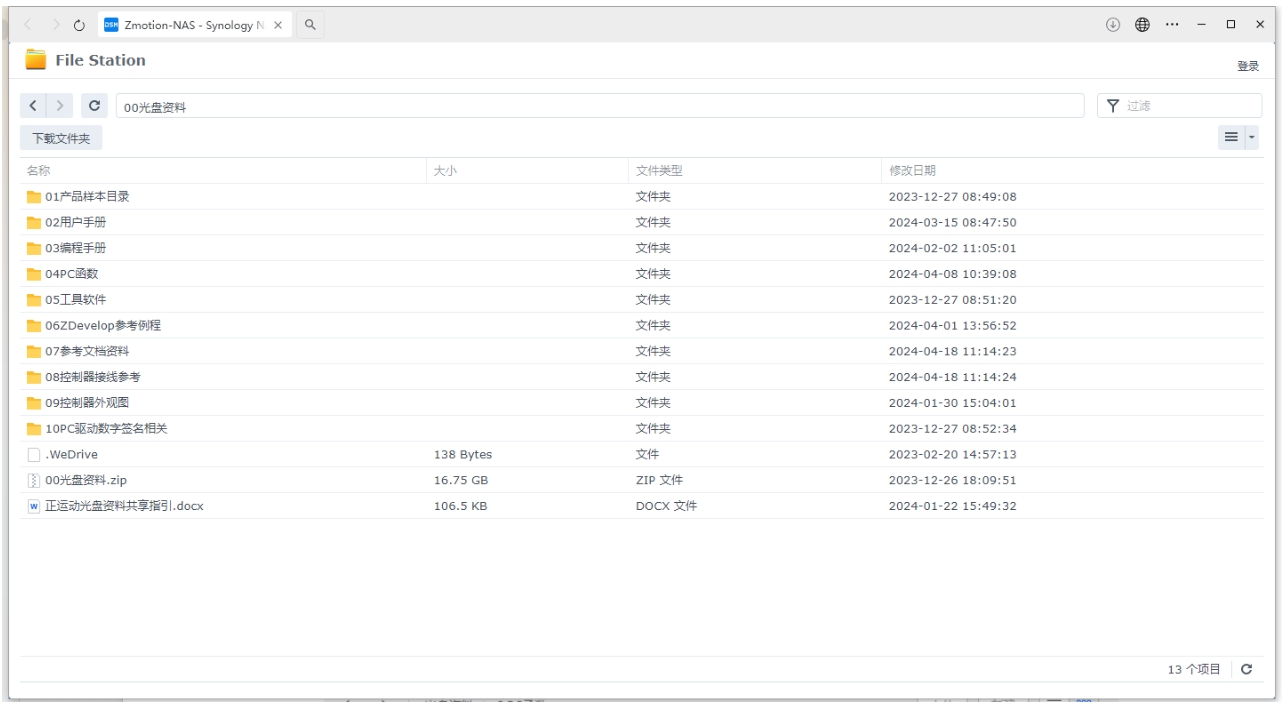
1.找到廠家提供的光盤資料里面的LabVIEW的VI庫文件,路徑如下。
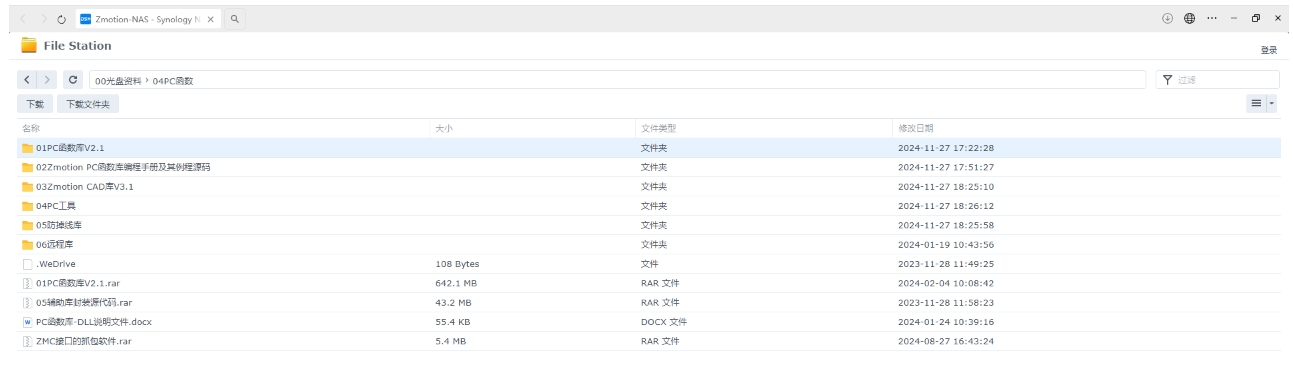
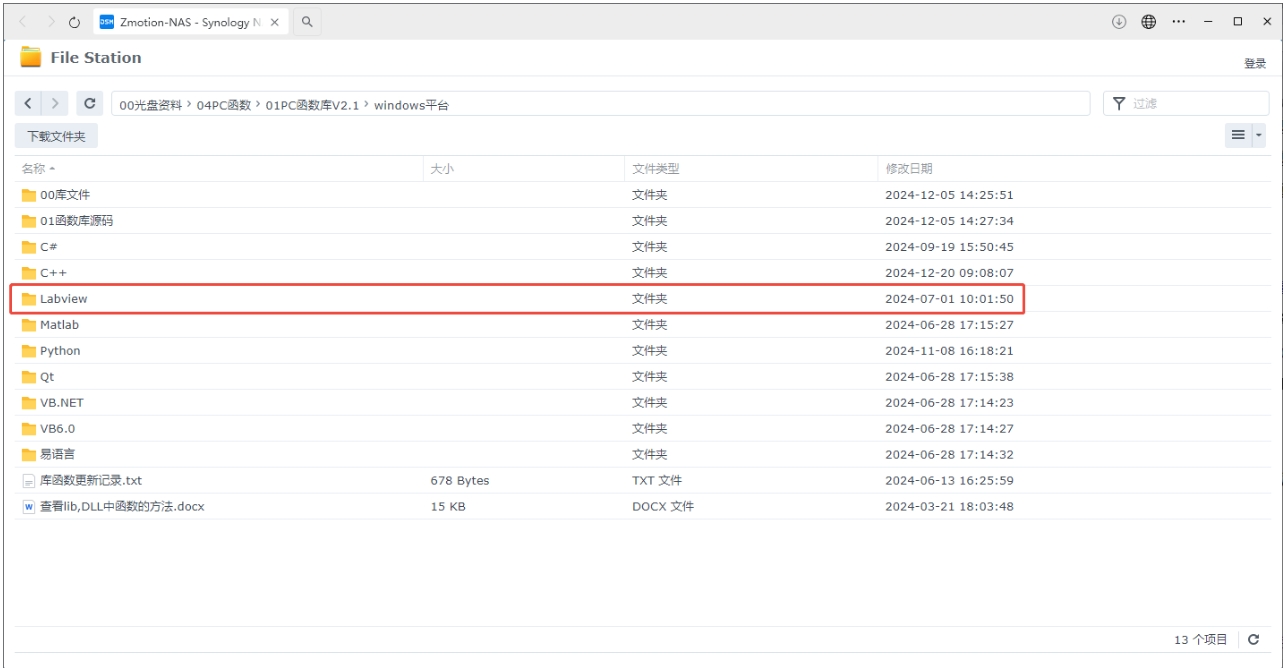
1)進(jìn)入廠商提供的光盤資料找到“04PC函數(shù)”文件夾,并點擊進(jìn)入。
2)選擇“01 PC函數(shù)庫V2.1”文件夾。
3)選擇“windows平臺”文件夾。
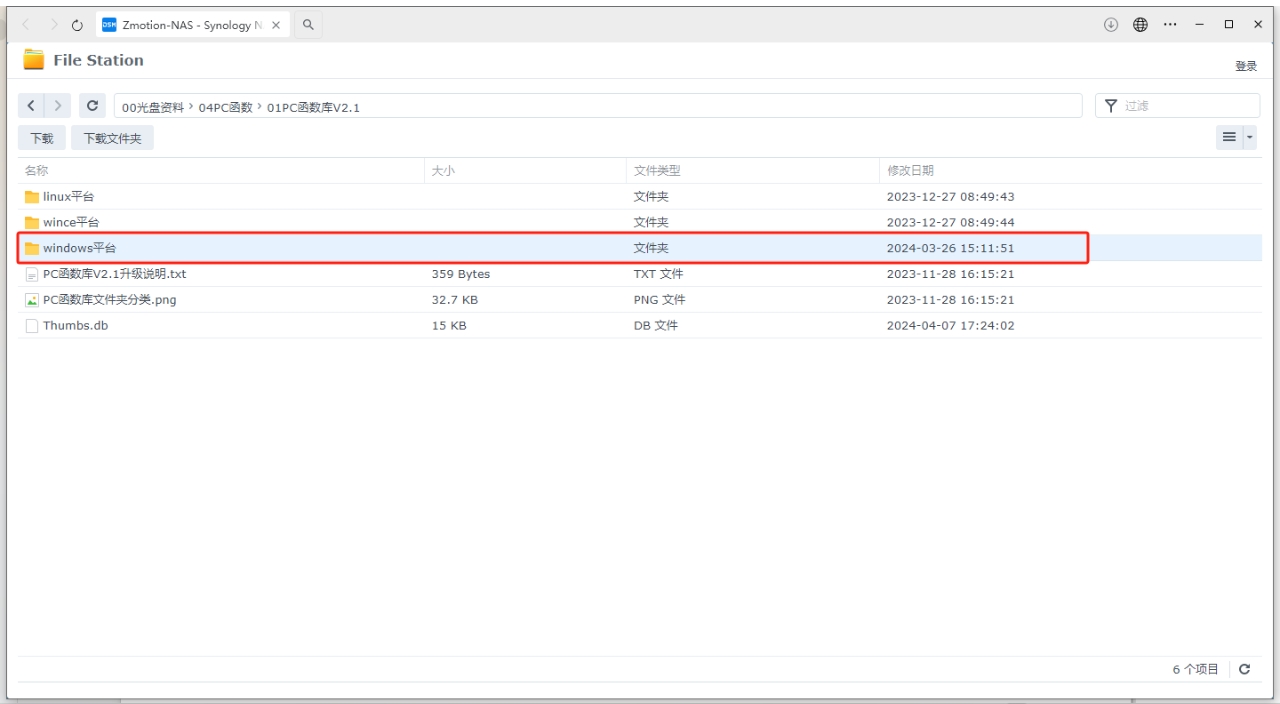
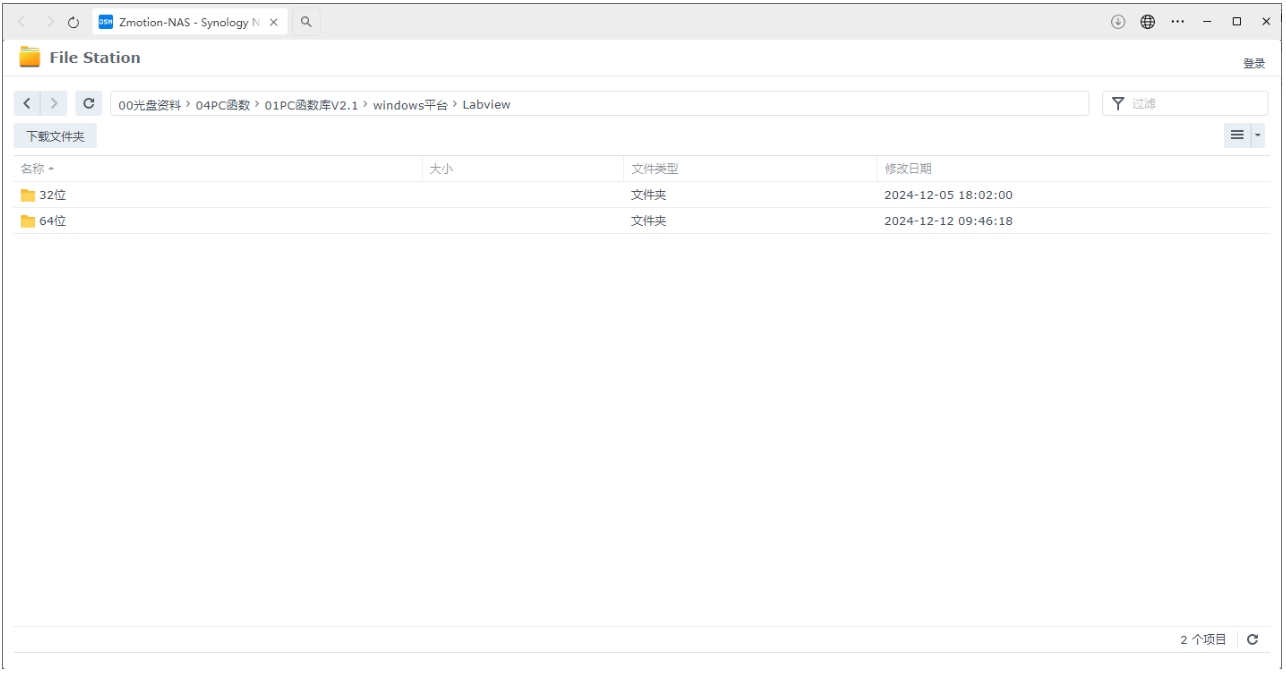
4)選擇“Labview文件夾”,里面有32位和64位的動態(tài)庫和例程。
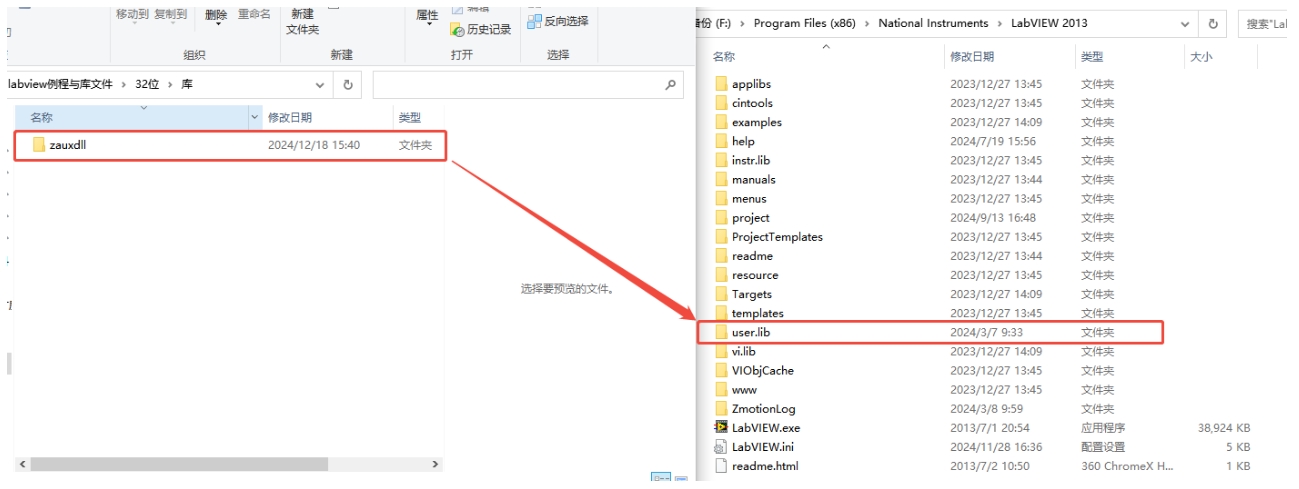
2.將廠商提供的LabVIEW的VI庫文件復(fù)制到LabVIEW安裝路徑下LabVIEW/user.lib的文件夾內(nèi)。
1)找到解壓的VI庫文件夾(zaudll是32位的VI庫,64的VI庫是newZauxDll64)。

2)選中LabVIEW右擊打開文件所在位置(這里以LabVIEW2013-32位為演示)。
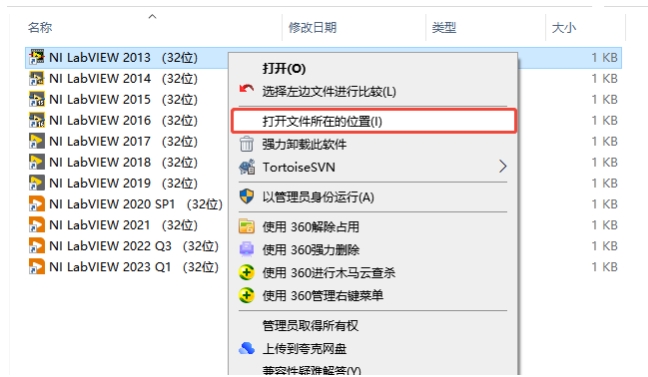
3)將整個VI庫文件夾直接復(fù)制放到user.lib該目錄,然后關(guān)閉LabVIEW軟件重新啟動。
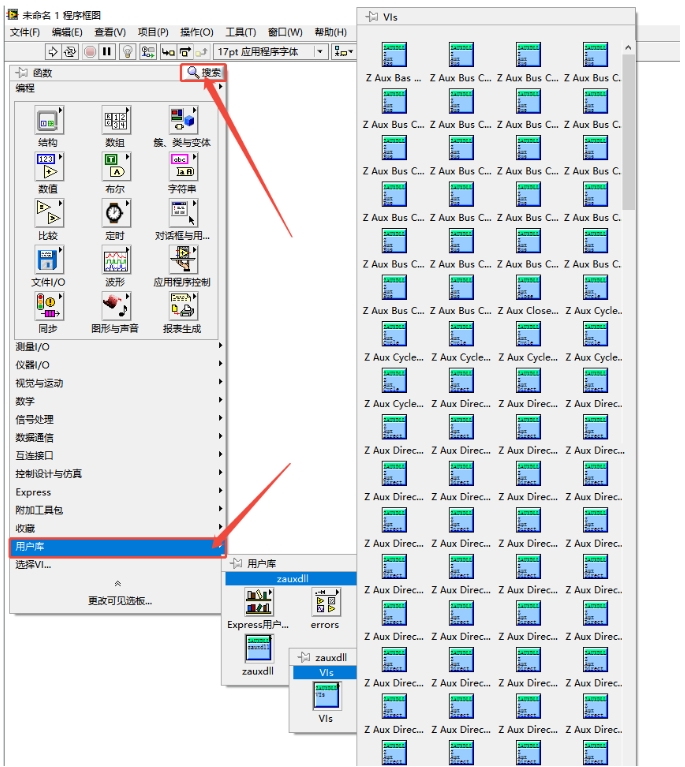
3.重新啟動LabVIEW后,選擇新建VI,然后右鍵點擊VI程序框圖空白處,選擇用戶庫來找到添加的VI庫,或者直接搜索VI,最后將需要的函數(shù)直接拖到面板上。

??? PC函數(shù)介紹
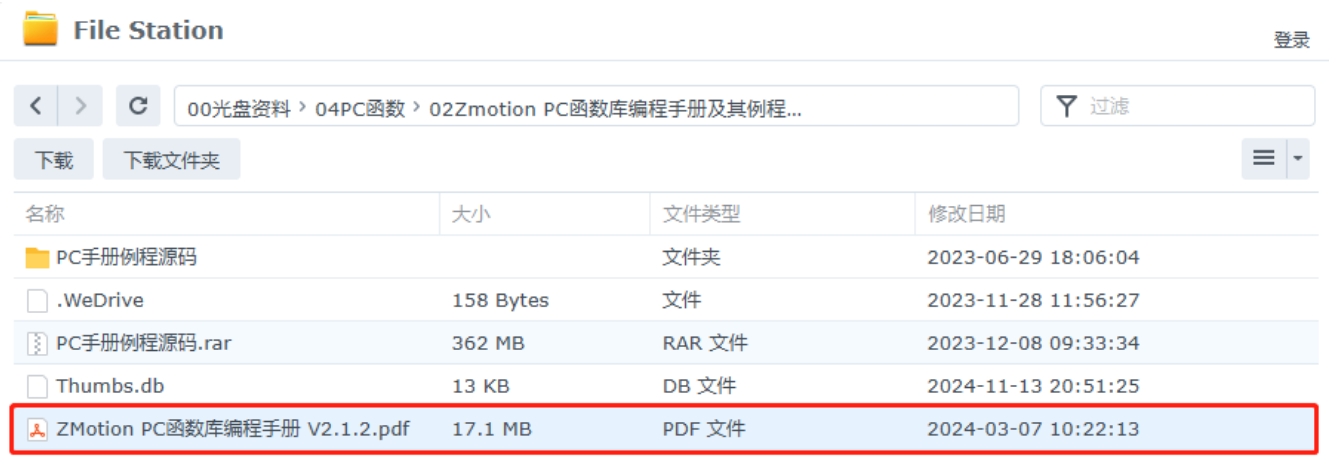
PC函數(shù)手冊可在光盤資料查看,具體路徑如下。
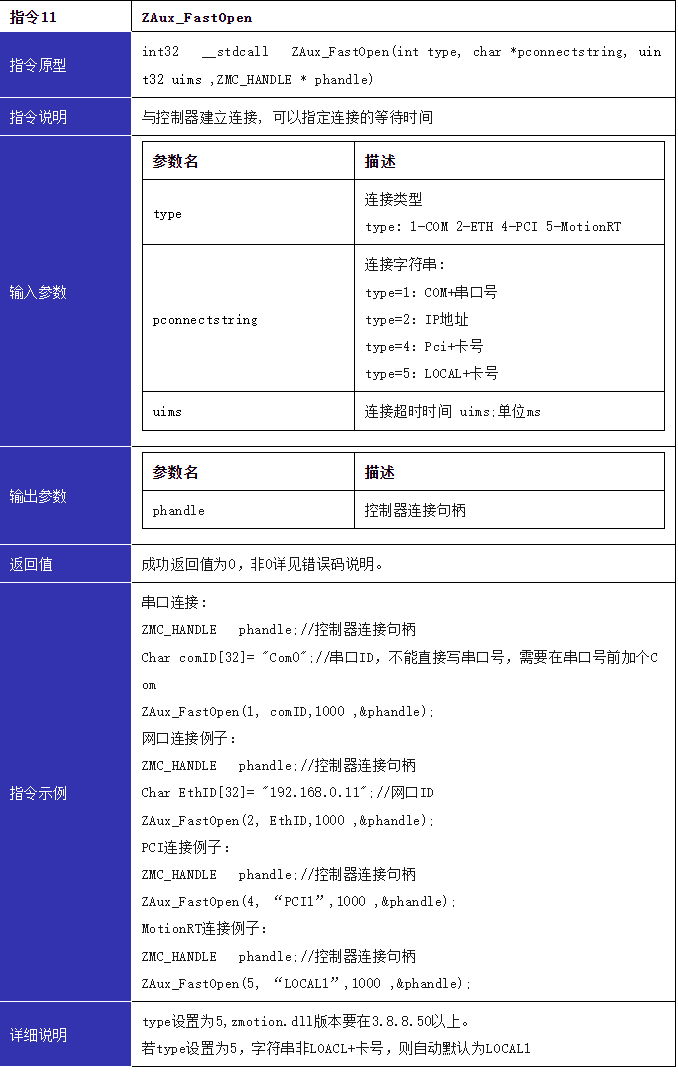
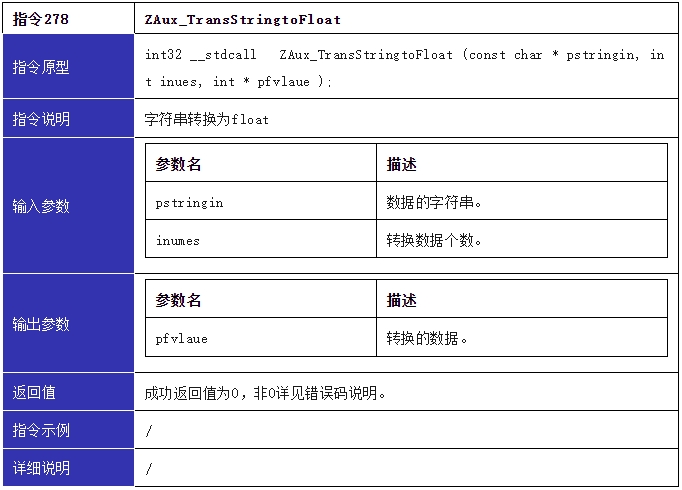
??? 在線命令
1.指令列表

2.重點說明
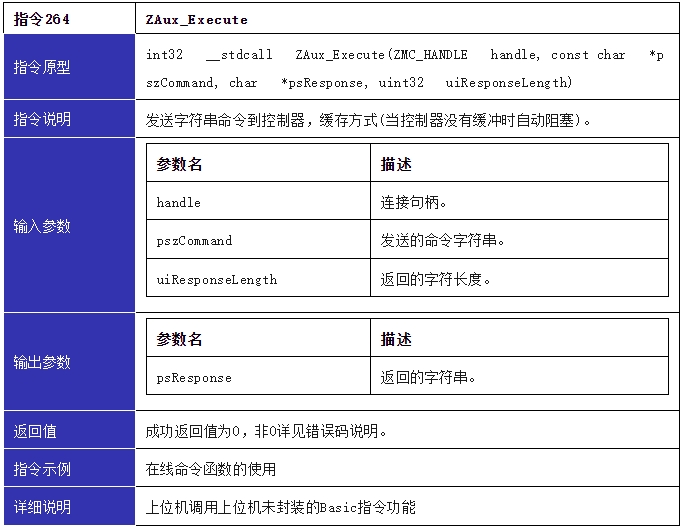
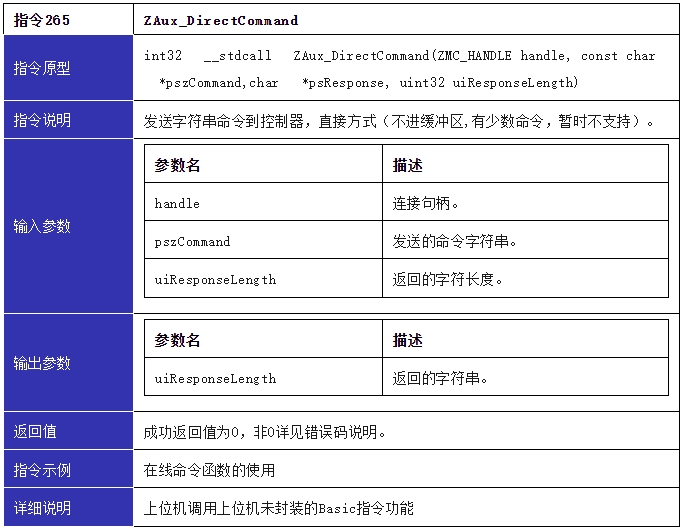
ZAux_Execute或ZAux_DirectCommand可對basic指令進(jìn)行封裝。如果使用到?jīng)]有封裝的命令或者想封裝自己的函數(shù),可以通過ZAux_Execute或 ZAux_DirectCommand進(jìn)行發(fā)送,或是參照已有代碼修改增加相應(yīng)的函數(shù)。發(fā)送字符串命令有兩種方式,緩沖方式和直接方式。具體如圖所示:
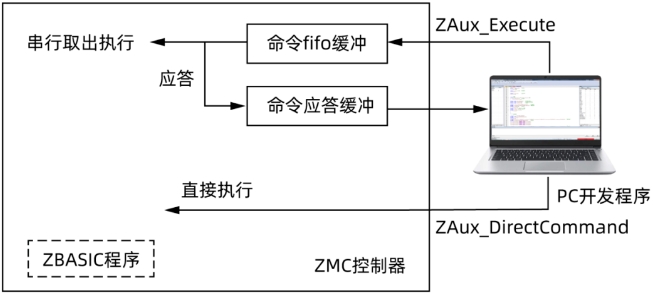
3.ZAux_Execute與ZAux_DirectCommand的區(qū)別
(1)ZAux_DirectCommand是直接發(fā)送到控制器,ZAux_Execute需要得到控制器應(yīng)答才能發(fā)送到控制器。
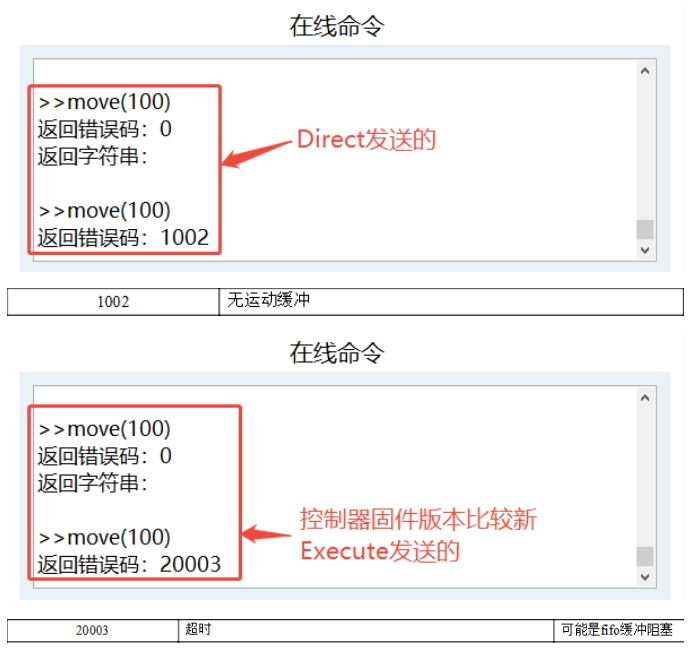
如果短時間內(nèi)多次使用ZAux_Execute,會造成ZAux_Execute發(fā)送命令阻塞,上位機(jī)跟控制器斷開連接。一般建議使用ZAux_DirectCommand,除非是ZAux_DirectCommand不支持的語句才使用ZAux_Execute。例如分別用ZAux_DirectCommand和ZAux_Execute快速的循環(huán)發(fā)送運(yùn)動指令MOVE(100),ZAux_DirectCommand會返回錯誤碼1002(無運(yùn)動緩沖),那是因為控制器的運(yùn)動緩沖區(qū)滿了。
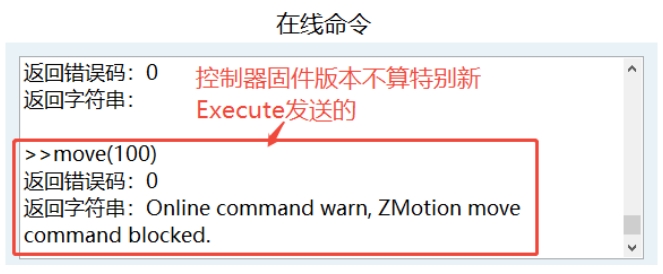
如果控制器的固件版本很新(例如RTSys的仿真器),ZAux_Execute會返回20003(超時,可能是fifo緩沖阻塞),控制器固件版本不算特別新的,ZAux_Execute會返回字符串“Online command warn, ZMotion move command blocked.”(在線命令警告,ZMotion移動命令被阻塞)。
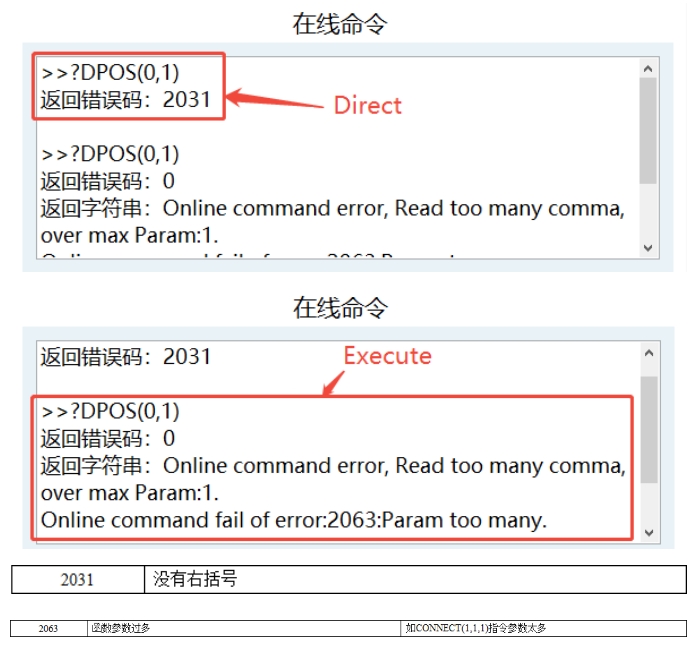
(2)因為ZAux_DirectCommand是以直接的方式把輸入框的字符串命令發(fā)送到控制器的,所以當(dāng)在線命令字符是錯誤的時候,ZAux_DirectCommand會運(yùn)行失敗,錯誤返回值顯示非0。
但是這錯誤值只是ZAux_DirectCommand運(yùn)行失敗的原因,并不能說明在線命令字符的錯誤原因,而同樣的情況,ZAux_Execute就運(yùn)行成功,錯誤返回值顯示0,但是ZAux_Execute返回的字符串會顯示在線命令字符的錯誤。
??? 例程說明
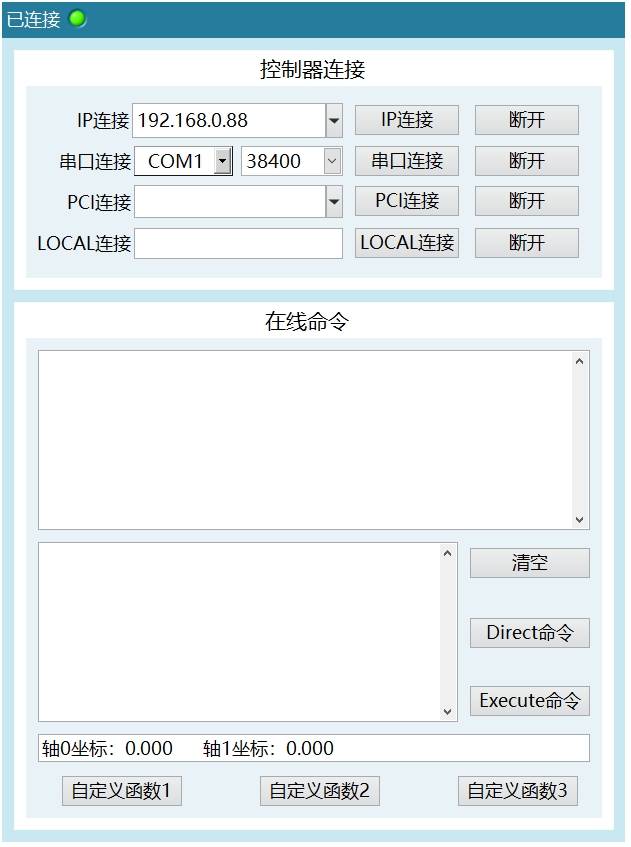
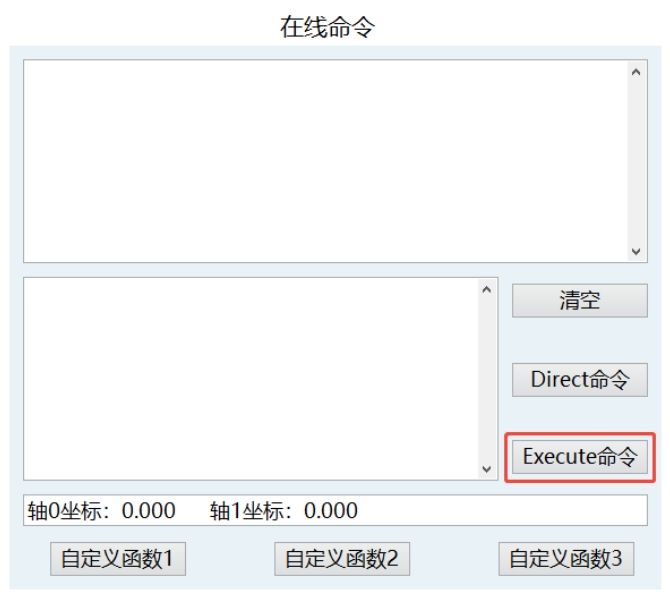
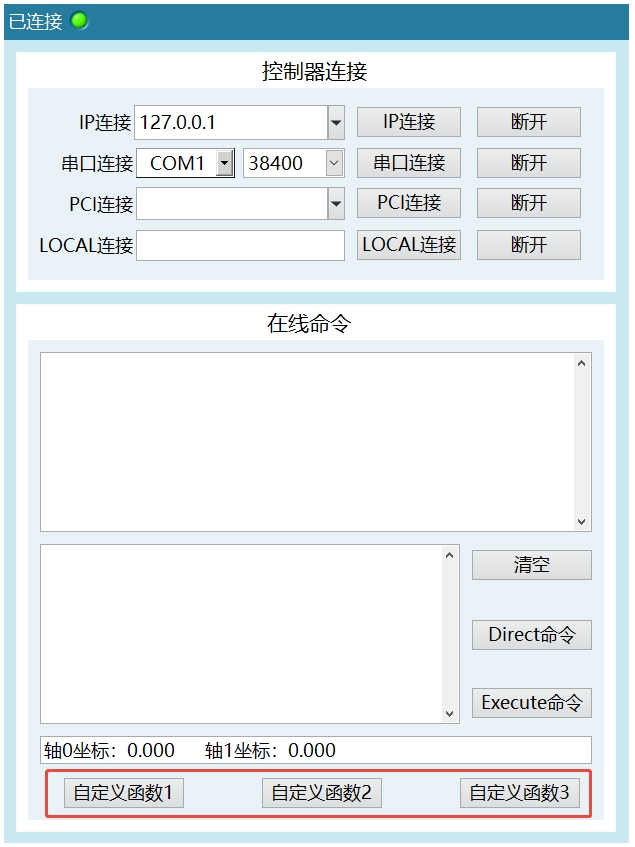
1.綜合例程界面如下
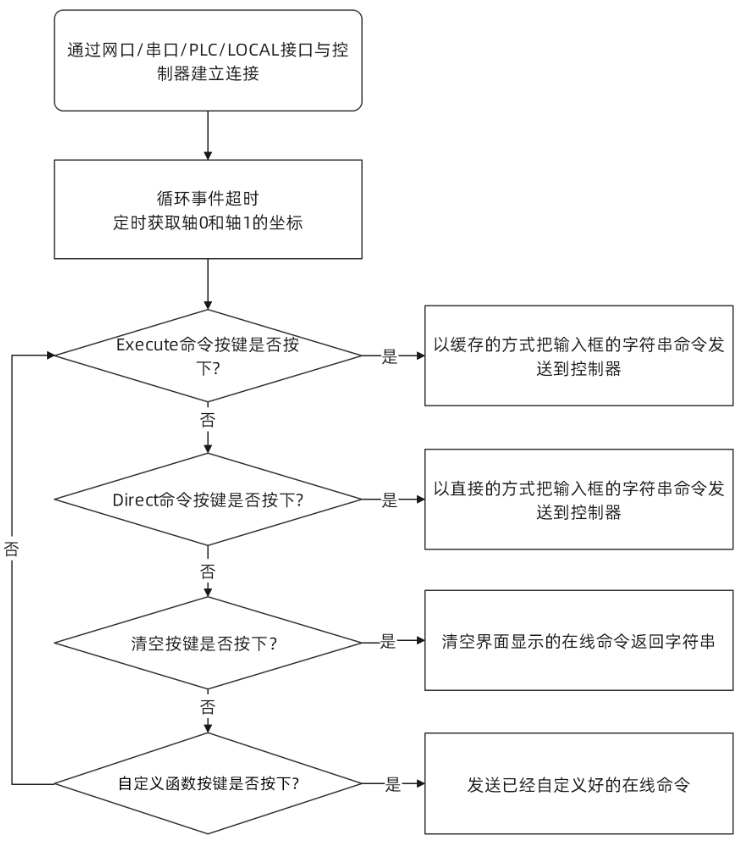
2.例程簡易流程圖
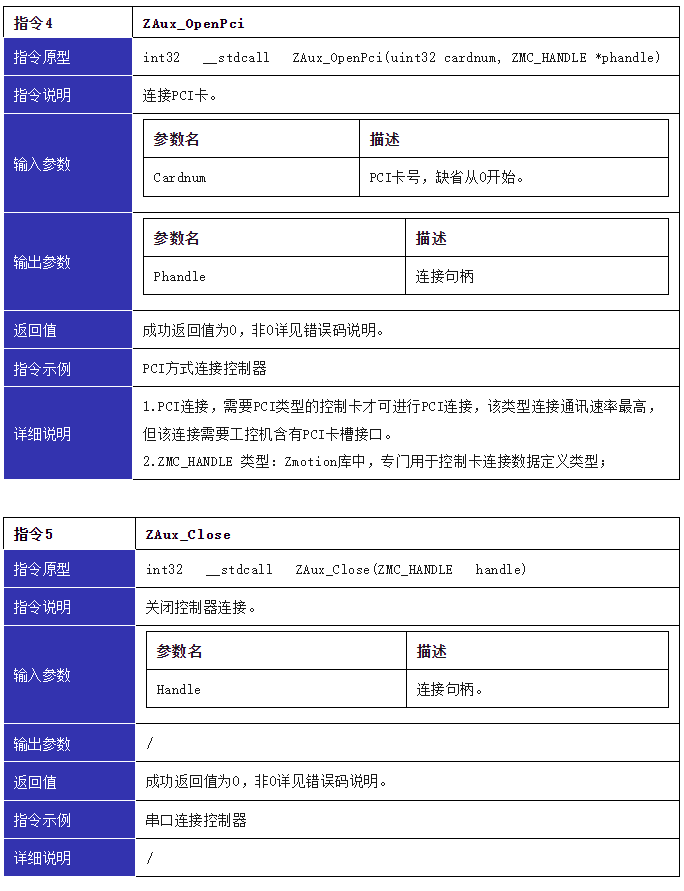
3.連接控制器
要想通過上位機(jī)控制控制器,就必須先連接控制器,上位機(jī)連接控制器的接口有四種,
分別是網(wǎng)口連接、串口連接、PCI和LOCAL連接。
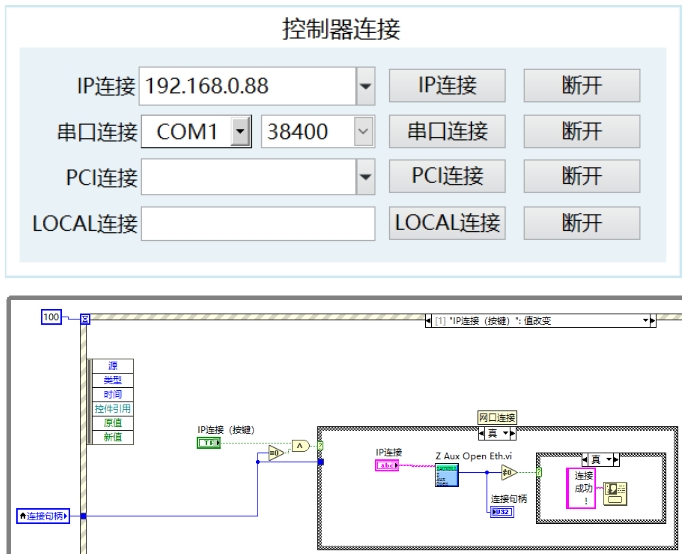
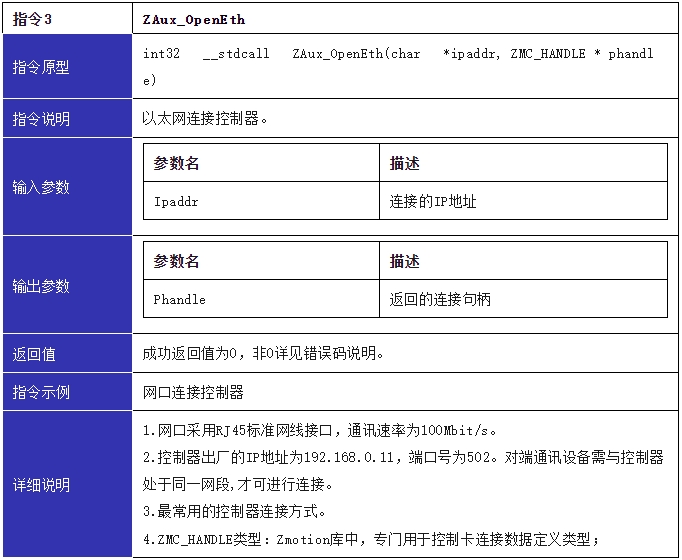
IP連接方式
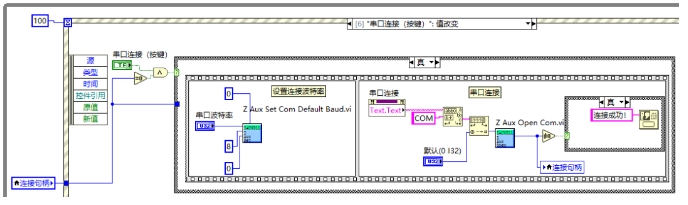
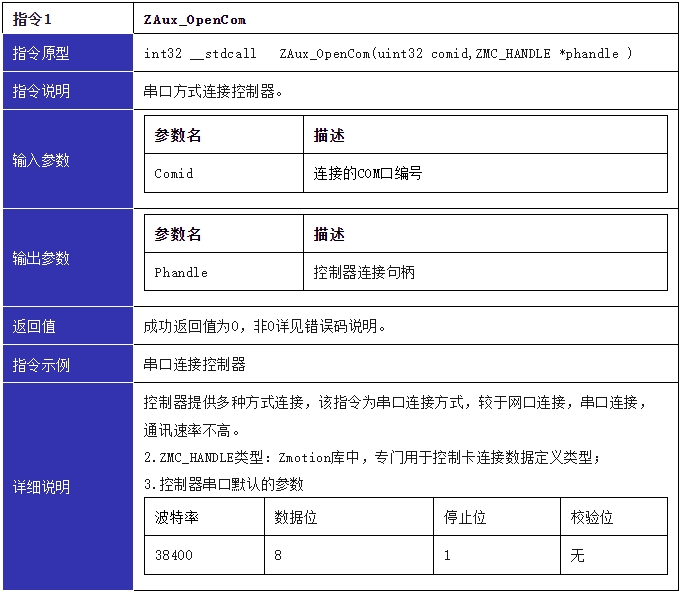
串口連接方式
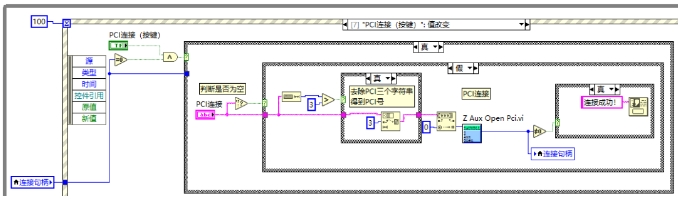
PCI連接方式
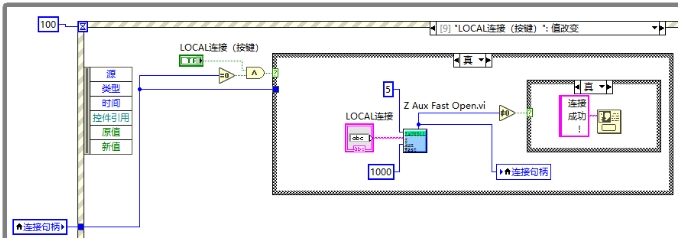
LOCAL連接方式
4.Direct命令按鍵與Execute命令按鍵
(1)點擊Direct命令按鍵,以直接的方式把輸入框的字符串命令發(fā)送到控制器,不進(jìn)緩沖區(qū),有少數(shù)命令,暫時不支持,例如?*MAX(打印所有規(guī)格參數(shù))。
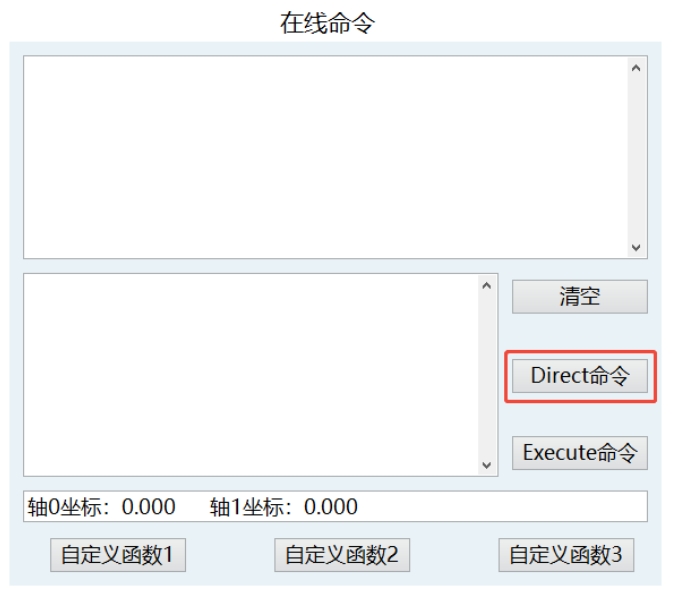
(2)點擊Execute命令按鍵,以緩存的方式把輸入框的字符串命令發(fā)送到控制器,當(dāng)控制器沒有緩沖時自動阻塞,例如發(fā)送運(yùn)動命令時自動阻塞時會顯示“Online command warn, ZMotion move command blocked.”(在線命令警告,ZMotion移動命令被阻塞)。
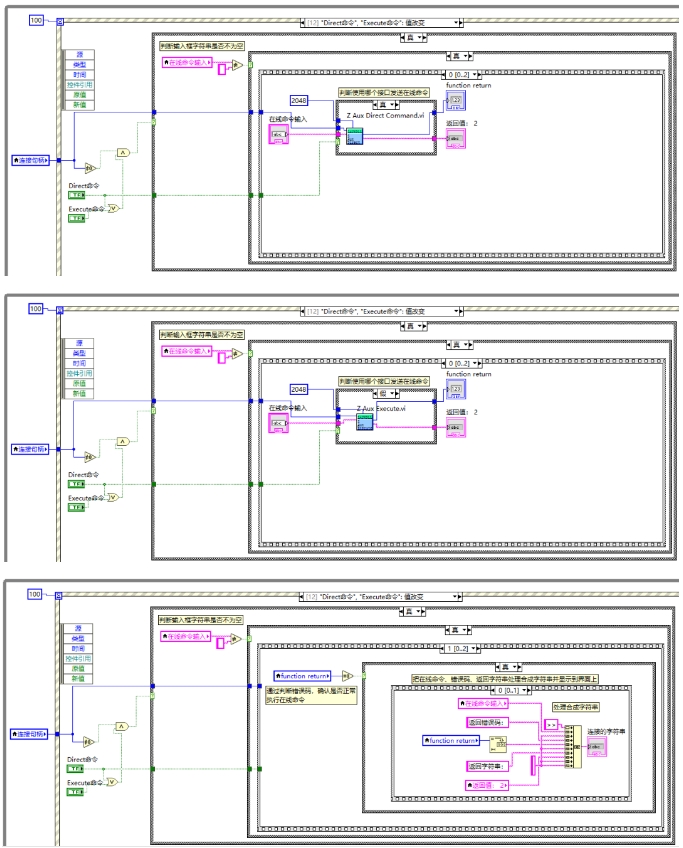
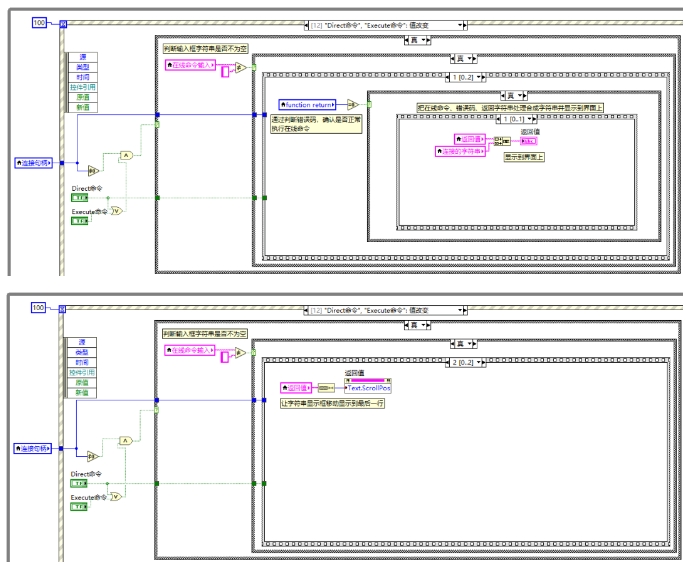
(3)Direct命令按鈕和Execute命令按鈕的事件處理是同一個,通過判斷Direct命令按鈕來確認(rèn)使用哪個接口,程序框圖如下。
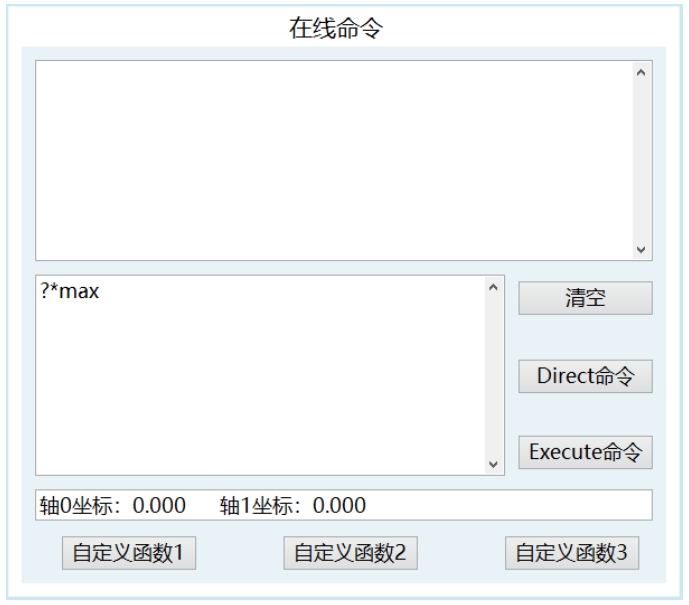
(4)分別通過ZAux_DirectCommand和ZAux_Execute發(fā)送在線命令?*MAX(打印所有規(guī)格參數(shù))。
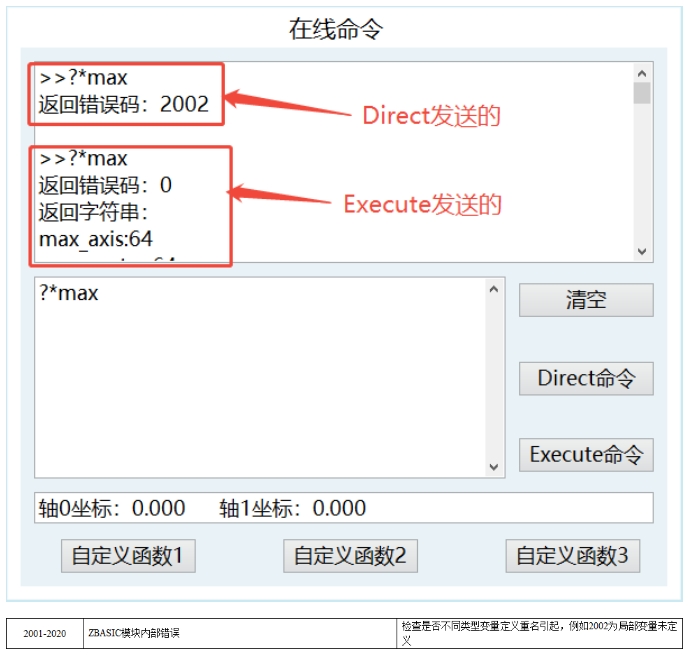
可以看出?*MAX(打印所有規(guī)格參數(shù))就是ZAux_DirectCommand少數(shù)不支持的命令之一,這些ZAux_DirectCommand少數(shù)不支持的命令可以通過ZAux_Execute進(jìn)行使用。
5.清空按鍵
(1)點擊清空按鍵清空界面顯示之前。

(2)點擊清空按鍵清空界面顯示之后。
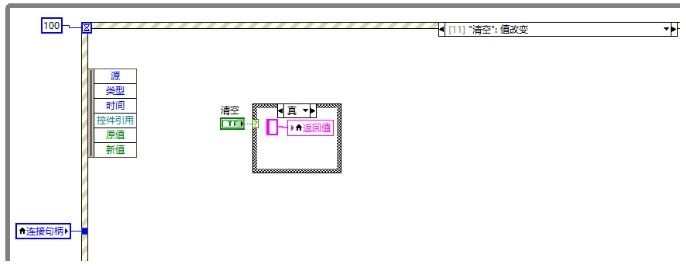
(3)清空按鈕的事件處理程序框圖如下。
6.自定義函數(shù)按鍵
本例程設(shè)置了3個自定義函數(shù)按鍵作為例子,分別對應(yīng)3種常見的在線命令接口使用場景。
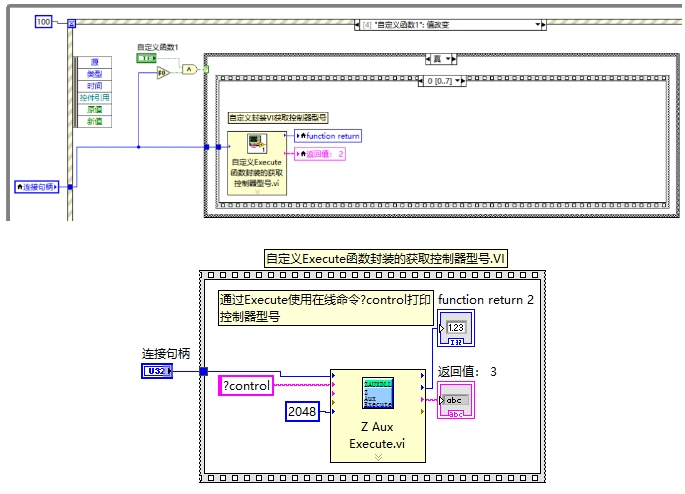
(1)自定義函數(shù)1按鍵。該按鍵主要演示了如何用Execute函數(shù)封裝一個使用在線命令獲取控制器型號的VI和如何用DirectCommand函數(shù)封裝一個使用在線命令設(shè)置速度功能的VI。
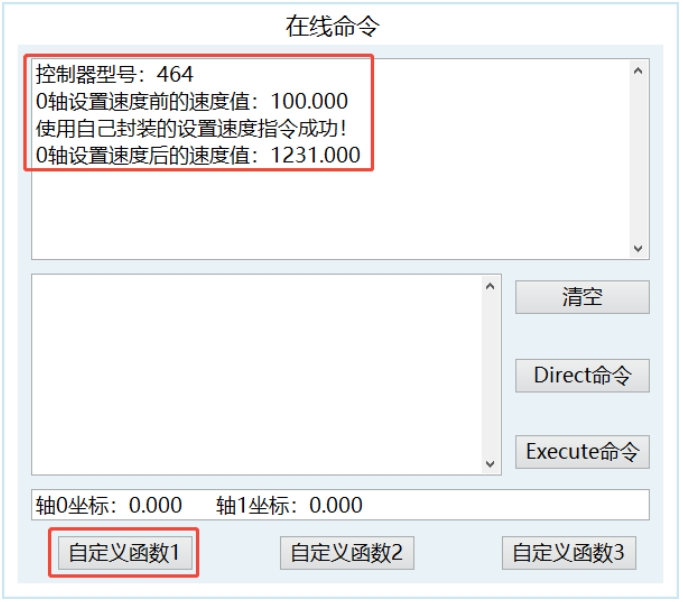
a.自定義封裝vi獲取控制器型號。
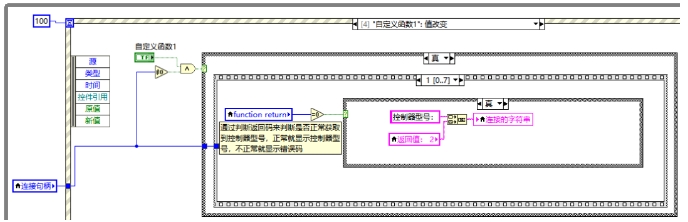
b.判斷處理自定義封裝獲取控制器型號VI的錯誤碼和返回值。
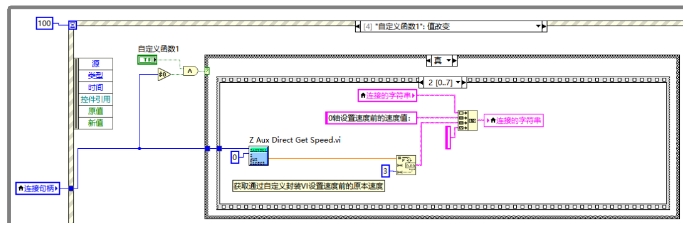
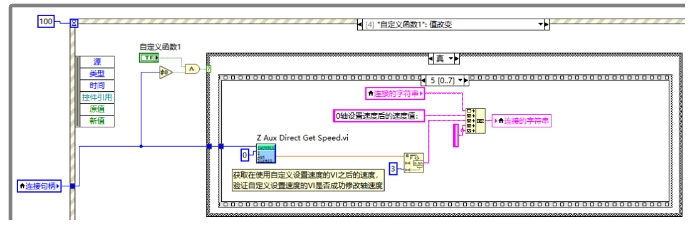
c.通過ZAux_Direct_SetSpeed獲取在使用自定義設(shè)置速度的VI之前的速度。
d.通過ZAux_DirectCommand封裝的設(shè)置軸速度VI的調(diào)用和封裝程序框圖。
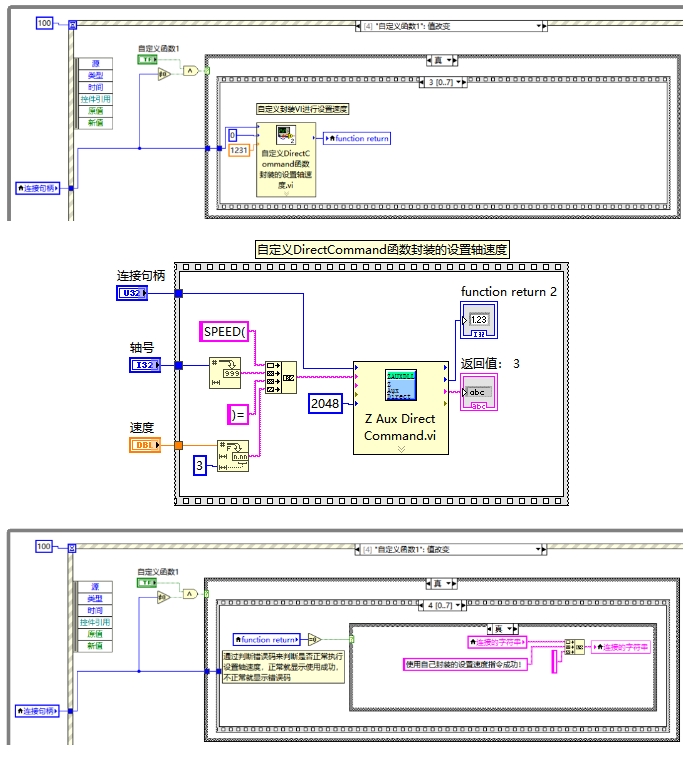
e.通過ZAux_Direct_SetSpeed獲取在使用自定義設(shè)置速度的VI之后的速度,驗證自定義設(shè)置速度的VI是否成功修改軸速度。
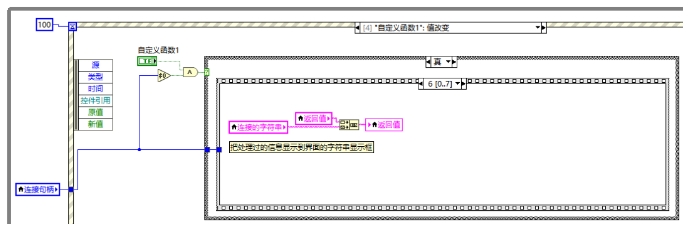
f.把處理過的信息顯示到界面的字符串顯示框。
(2)用戶若想要獲取多種數(shù)據(jù),如軸的命令位置,軸的反饋位置,板卡上的 IO 點等等,往往都是通過多種單獨獨立的函數(shù)獲取不同的數(shù)據(jù),這樣堆積,會導(dǎo)致讀寫次數(shù)的上位,導(dǎo)致程序的卡頓。為了提升一個上位程序的,往往可以通過自己定義一個自己的函數(shù),通過一個函數(shù),快速的把數(shù)據(jù)傳輸?shù)缴衔怀绦蛏厦鎭恚鞘峭ㄟ^多次循環(huán)來獲取到不同類型的數(shù)據(jù)。
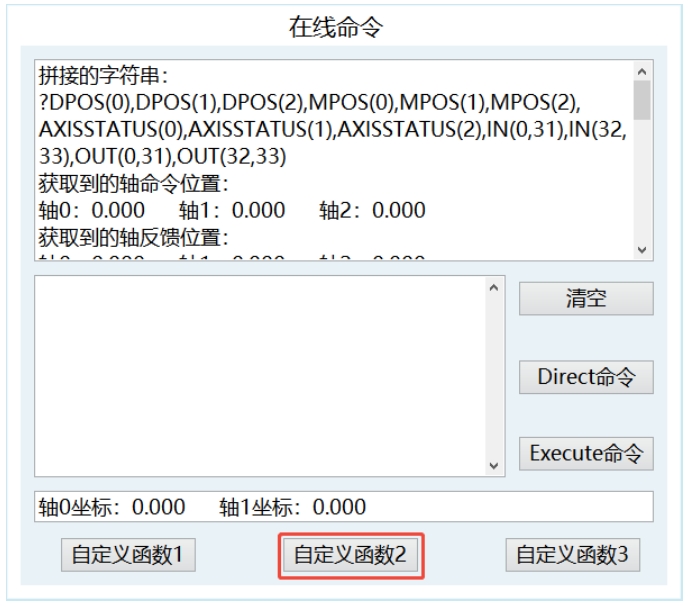
如下舉例:
假設(shè)有一個簡易的三軸平臺,需要讀取軸0,軸1,軸2的命令位置、反饋位置和軸狀態(tài)以及控制器板卡上的輸入口0,輸入口23,輸出口0,輸出口,以及三個軸的狀態(tài)。獲取數(shù)據(jù)程序如下:
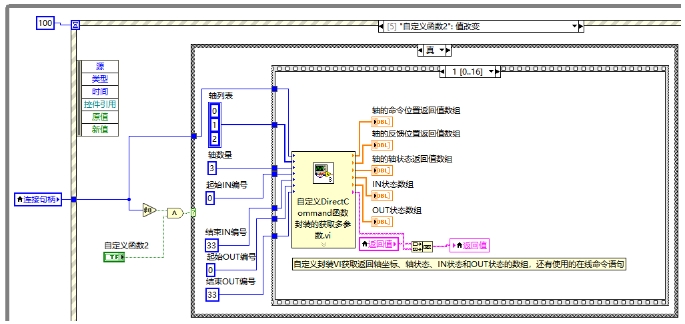
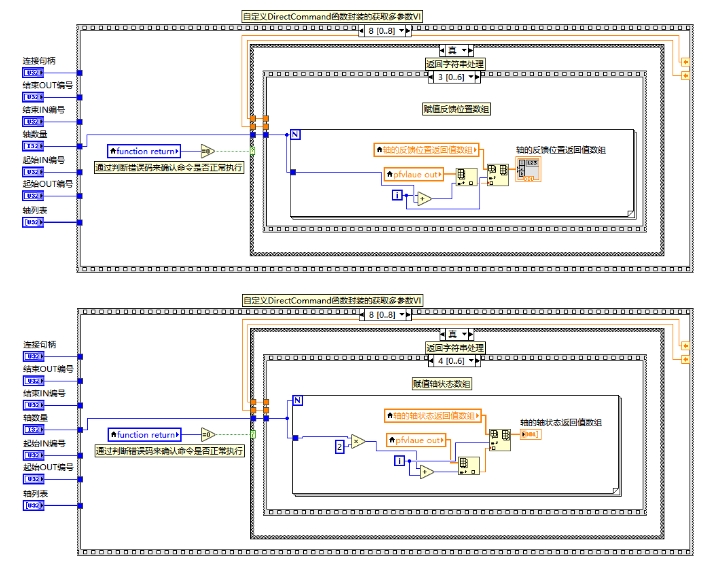
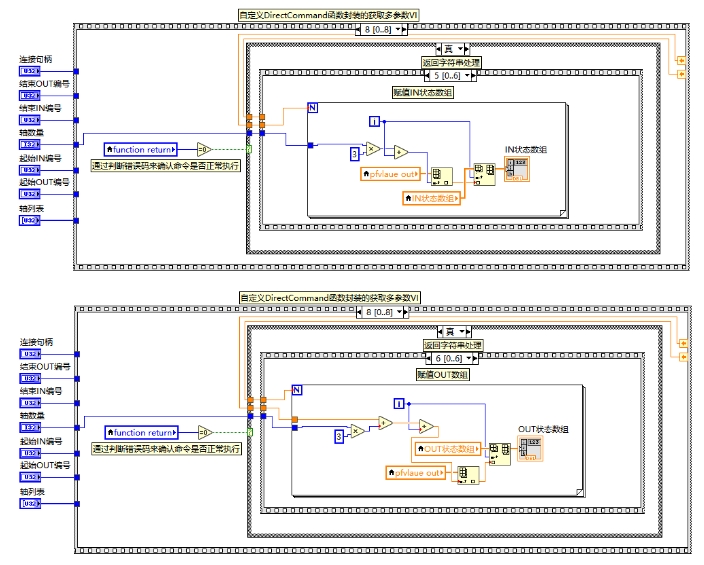
a.通過ZAux_DirectCommand封裝的獲取多參數(shù)VI的調(diào)用和封裝程序框圖。
b.自定義函數(shù)封裝的獲取多參數(shù)VI程序框圖中的拼接在線命令字符。
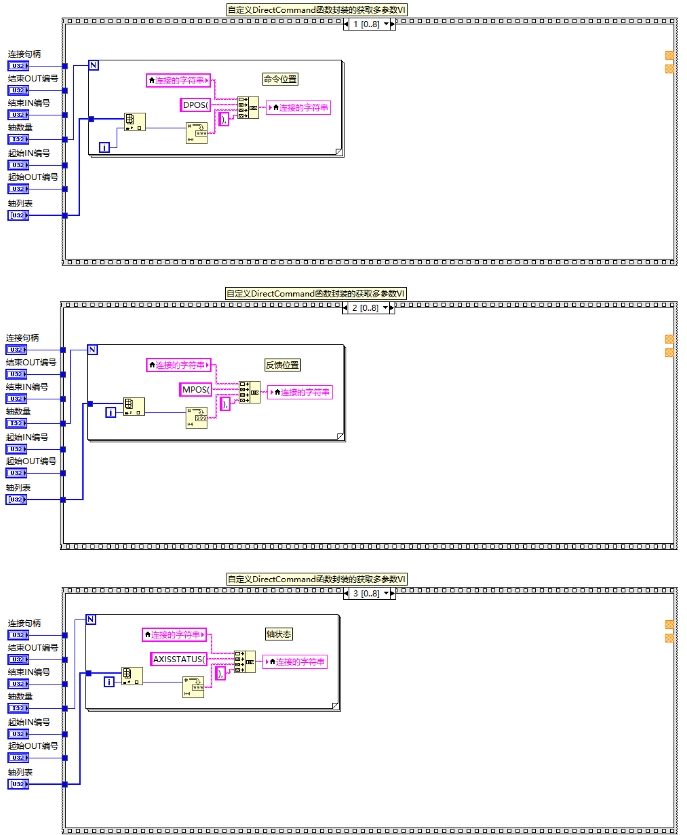
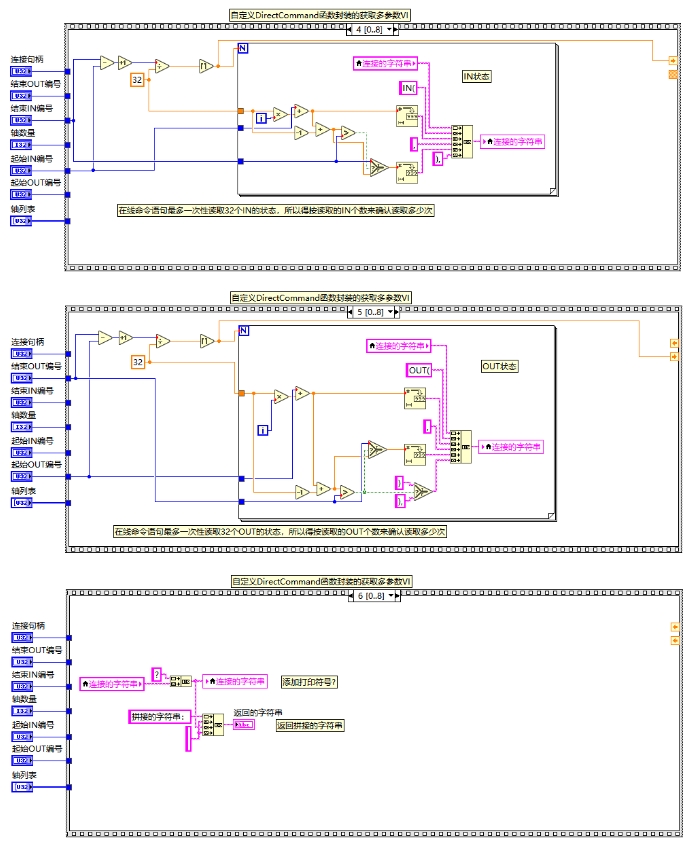
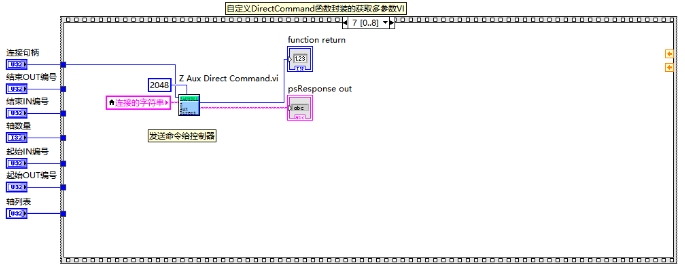
c.自定義函數(shù)封裝的獲取多參數(shù)VI程序框圖中的發(fā)送在線命令字符串。
d.自定義函數(shù)封裝的獲取多參數(shù)VI程序框圖中的返回字符串處理。
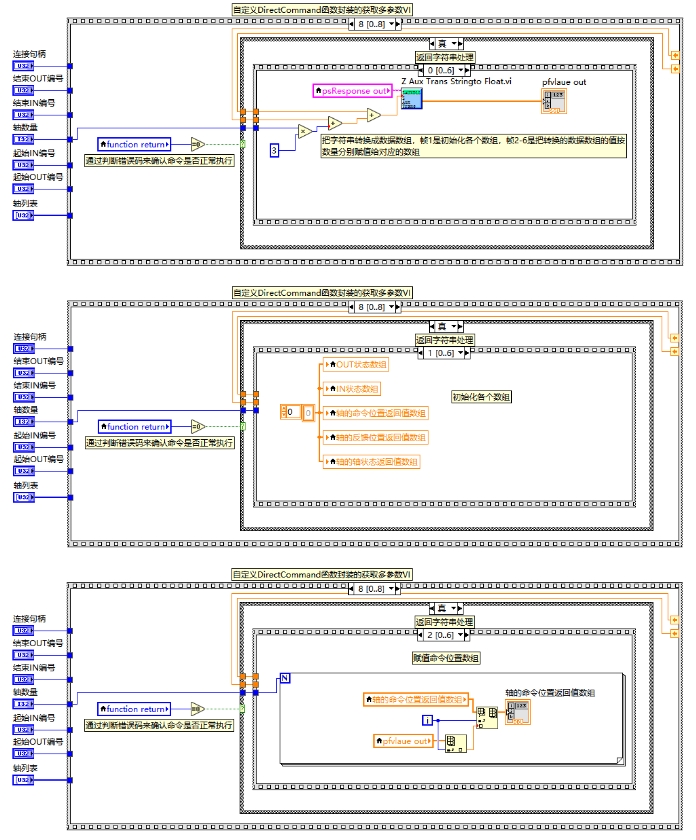
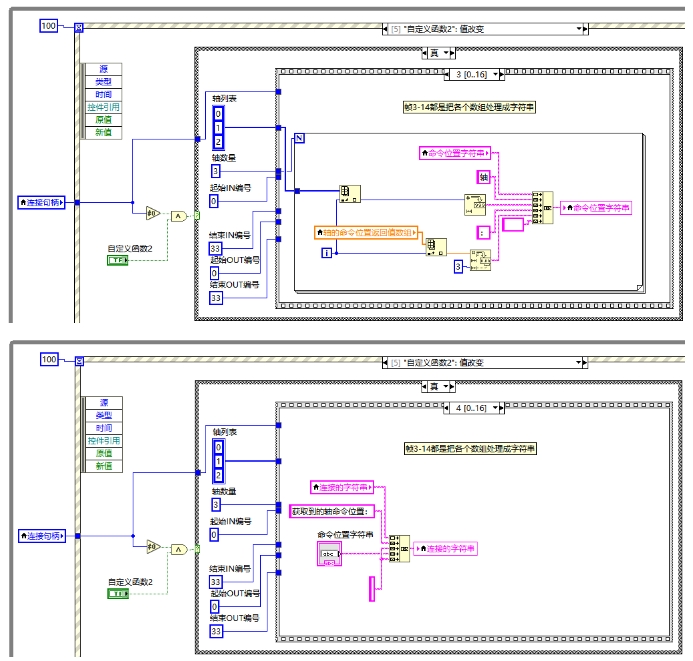
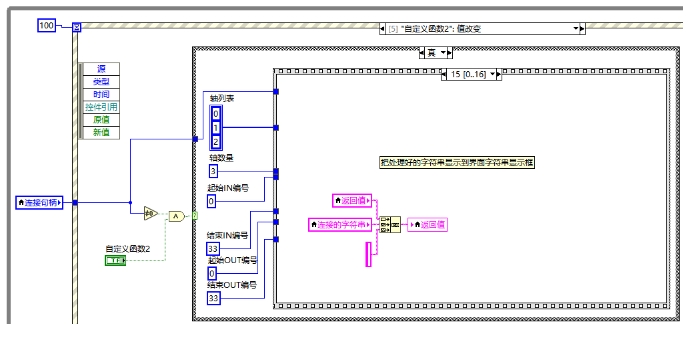
e.把各個數(shù)組數(shù)據(jù)處理成字符串并顯示到界面字符串顯示框,要處理的數(shù)組較多,下面以命令位置數(shù)組處理為演示。
(3)一般點膠行業(yè),木工行業(yè)用的居多,都是用連續(xù)軌跡,連續(xù)軌跡之間有插入緩沖輸出,如果把運(yùn)動跟連續(xù)軌跡的運(yùn)動跟緩沖輸出分開來發(fā)的話,在批量加工下發(fā)大量命令時,對通訊效率會有一定影響,采用自定義封裝指令的方式,能一次性下發(fā)多條運(yùn)動指令,改善批量加工的效率。
如下舉例:
假設(shè)控制一個XY兩軸平臺,從坐標(biāo)點(0,0)→(100,0)(輸出口0輸出50ms)→(100,100)(輸出口0輸出50ms)→(0,100)(輸出口0輸出50ms)→(0,0)(輸出口0輸出50ms)的軌跡,則可以通過自己封裝,用一條函數(shù),快速發(fā)送下去:

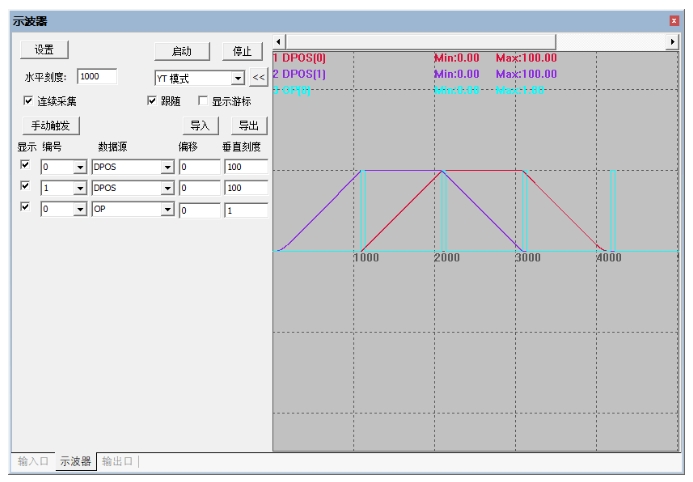
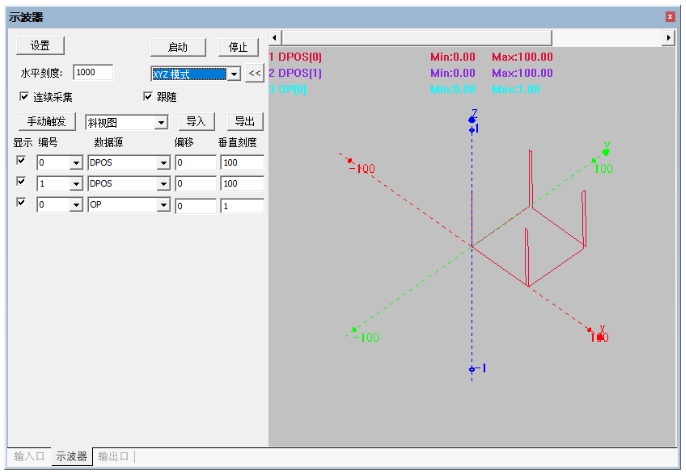
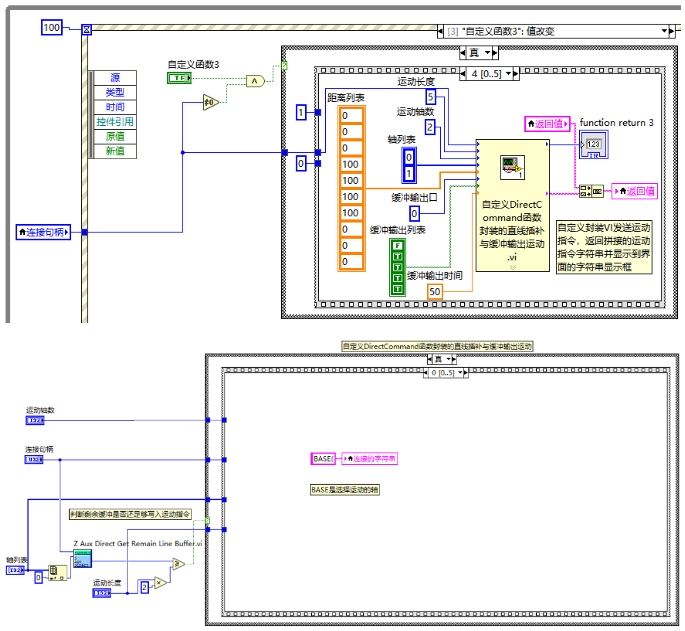
a.使用自定義封裝VI發(fā)送運(yùn)動指令前的設(shè)置。
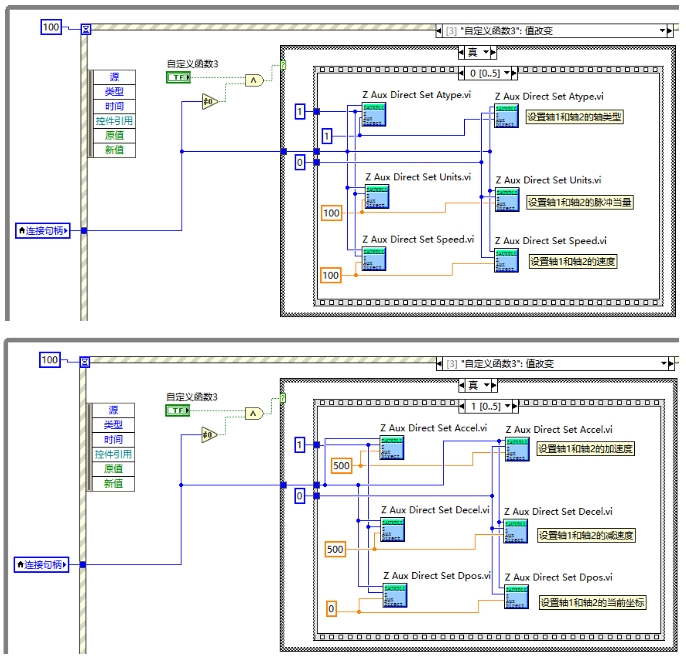
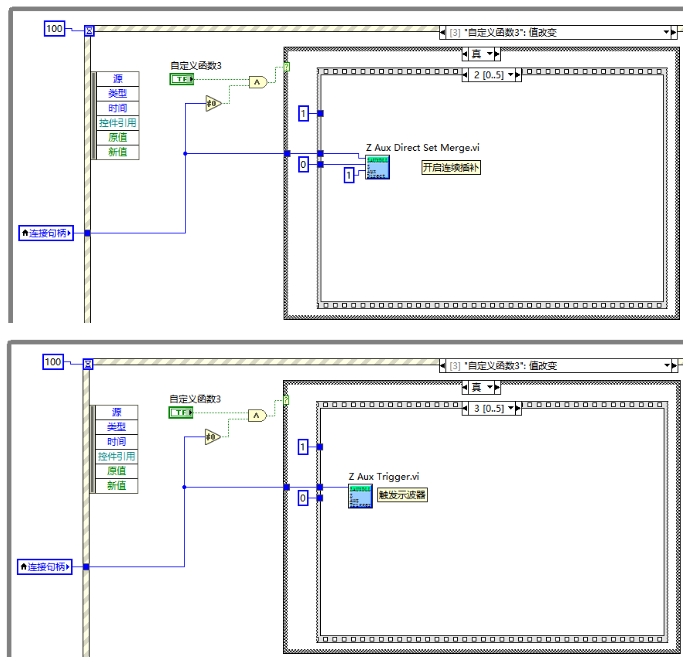
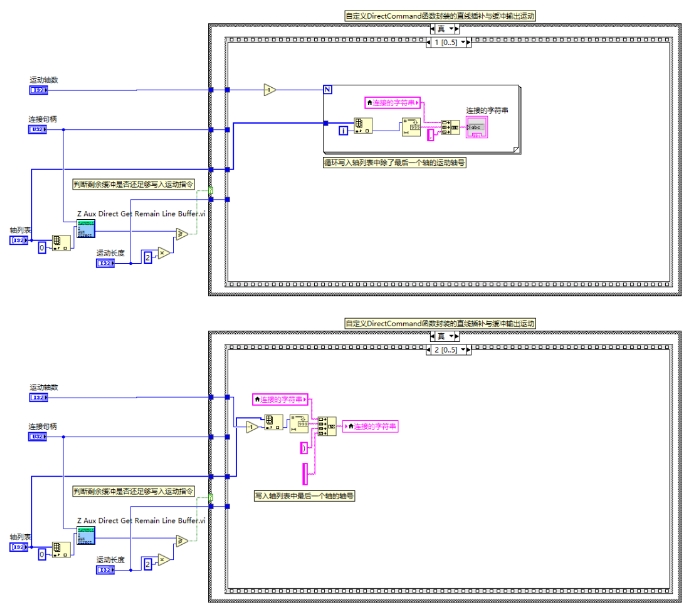
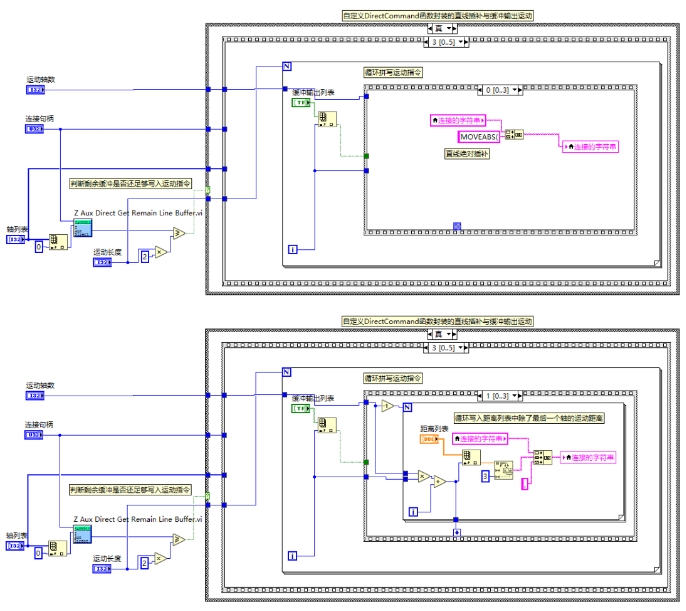
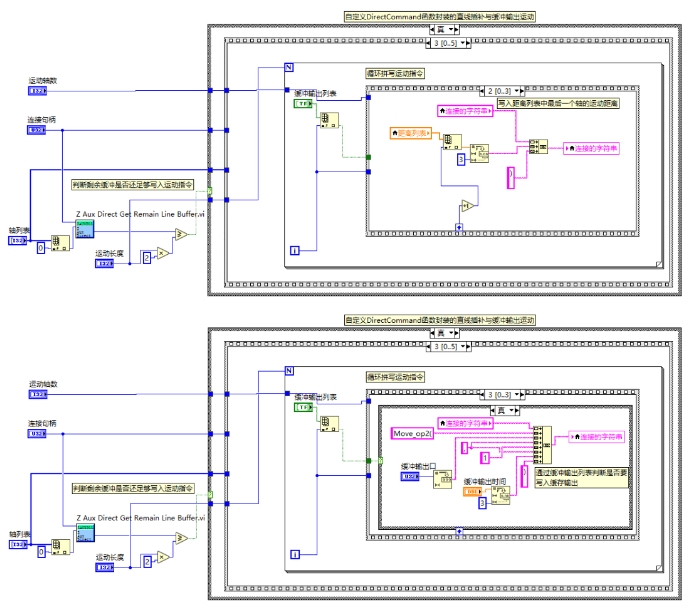
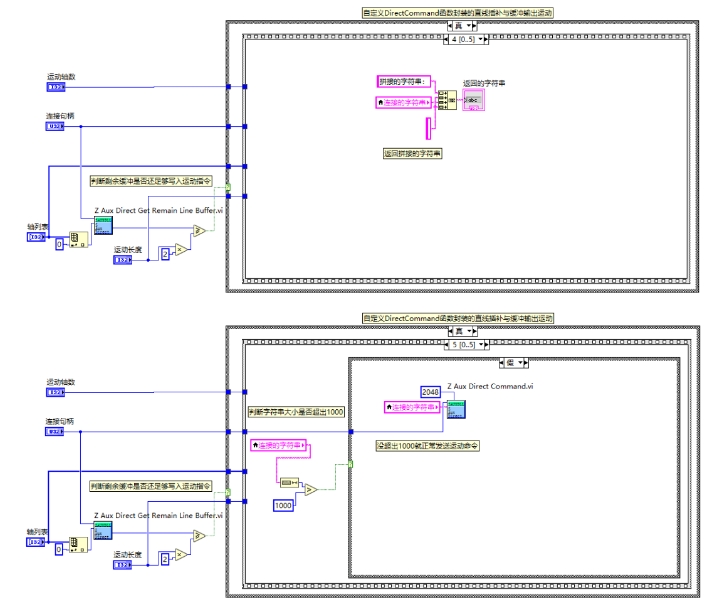
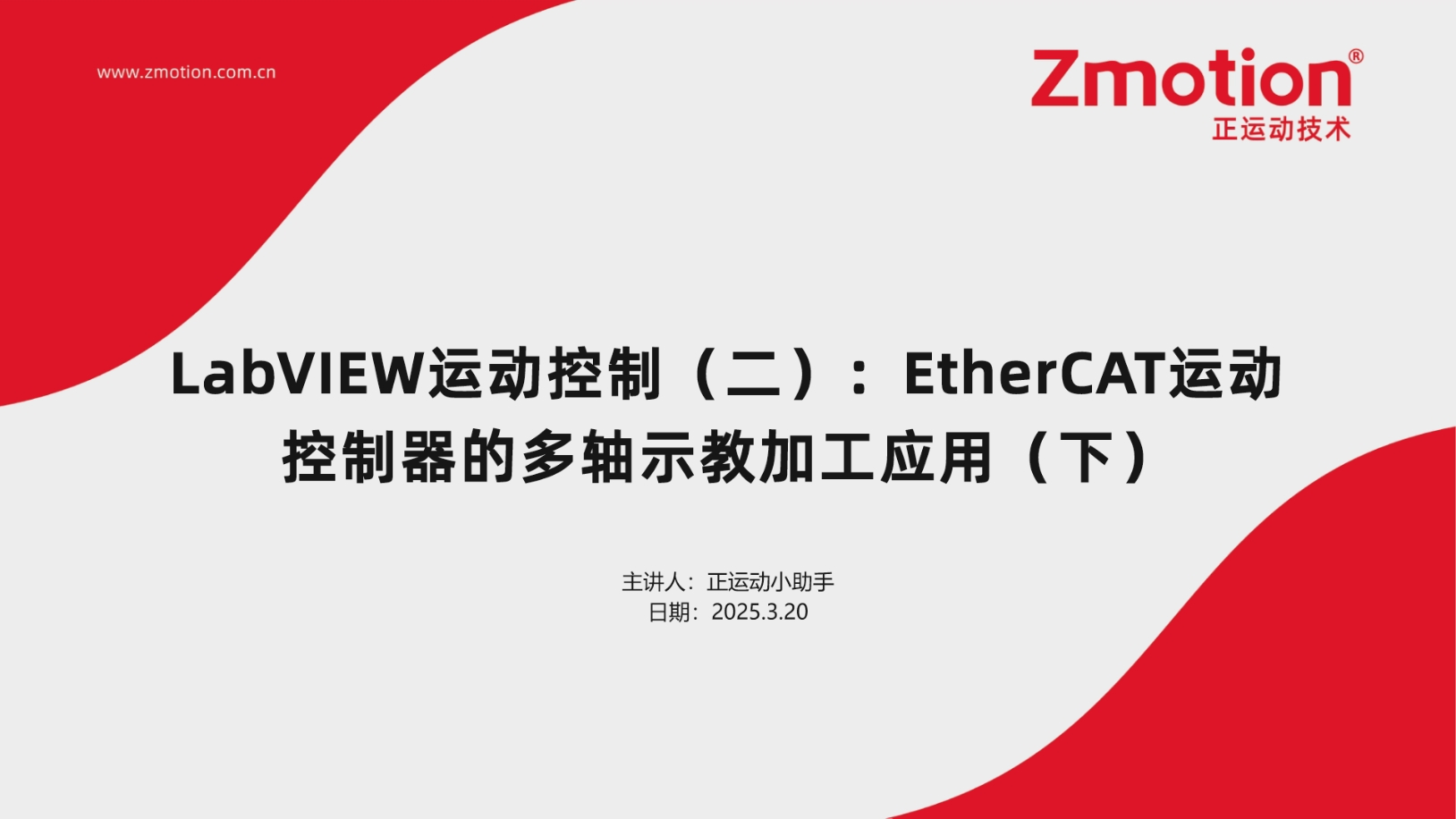
b.通過ZAux_DirectCommand封裝的直線插補(bǔ)與緩存輸出運(yùn)動VI的調(diào)用和封裝程序框圖。
教學(xué)視頻講解請點擊→“LabVIEW運(yùn)動控制(三):EtherCAT運(yùn)動控制器的高效加工指令自定義封裝”查看。
完整代碼獲取地址
▼

本次,正運(yùn)動技術(shù)LabVIEW運(yùn)動控制(三):EtherCAT運(yùn)動控制器的高效加工指令自定義封裝,就分享到這里。
更多精彩內(nèi)容請關(guān)注“正運(yùn)動小助手”公眾號,需要相關(guān)開發(fā)環(huán)境與例程代碼,請咨詢正運(yùn)動技術(shù)銷售工程師:400-089-8936。
本文由正運(yùn)動技術(shù)原創(chuàng),歡迎大家轉(zhuǎn)載,共同學(xué)習(xí),一起提高中國智能制造水平。文章版權(quán)歸正運(yùn)動技術(shù)所有,如有轉(zhuǎn)載請注明文章來源。
正運(yùn)動技術(shù)專注于運(yùn)動控制技術(shù)研究和通用運(yùn)動控制軟硬件產(chǎn)品的研發(fā),是國家級高新技術(shù)企業(yè)。正運(yùn)動技術(shù)匯集了來自華為、中興等公司的優(yōu)秀人才,在堅持自主創(chuàng)新的同時,積極聯(lián)合各大高校協(xié)同運(yùn)動控制基礎(chǔ)技術(shù)的研究,是國內(nèi)工控領(lǐng)域發(fā)展最快的企業(yè)之一,也是國內(nèi)少有、完整掌握運(yùn)動控制核心技術(shù)和實時工控軟件平臺技術(shù)的企業(yè)。主要業(yè)務(wù)有:運(yùn)動控制卡_運(yùn)動控制器_EtherCAT運(yùn)動控制卡_EtherCAT控制器_運(yùn)動控制系統(tǒng)_視覺控制器__運(yùn)動控制PLC_運(yùn)動控制_機(jī)器人控制器_視覺定位_XPCIe/XPCI系列運(yùn)動控制卡等。
審核編輯 黃宇
-
LabVIEW
+關(guān)注
關(guān)注
1995文章
3670瀏覽量
333307 -
運(yùn)動控制器
+關(guān)注
關(guān)注
2文章
445瀏覽量
25155 -
運(yùn)動控制
+關(guān)注
關(guān)注
4文章
638瀏覽量
33381 -
ethercat
+關(guān)注
關(guān)注
19文章
997瀏覽量
39635
發(fā)布評論請先 登錄
EtherCAT運(yùn)動控制卡的自定義運(yùn)動曲線

【正運(yùn)動】高速高精,超高實時性的PCIe EtherCAT實時運(yùn)動控制卡 | PCIE464

LabVIEW運(yùn)動控制(一):EtherCAT運(yùn)動控制器的SCARA機(jī)械手應(yīng)用 #正運(yùn)動技術(shù) #運(yùn)動控制器

LabVIEW運(yùn)動控制(二):EtherCAT運(yùn)動控制器的多軸示教加工應(yīng)用(上)#正運(yùn)動技術(shù) #運(yùn)動控制器

LabVIEW運(yùn)動控制(二):EtherCAT運(yùn)動控制器的多軸示教加工應(yīng)用(中) #正運(yùn)動技術(shù) #運(yùn)動控制器
LabVIEW運(yùn)動控制(二):EtherCAT運(yùn)動控制器的多軸示教加工應(yīng)用(下)#正運(yùn)動技術(shù) #運(yùn)動控制

LabVIEW運(yùn)動控制(三):EtherCAT運(yùn)動控制器的高效加工指令自定義封裝 #正運(yùn)動技術(shù) #運(yùn)動控制器
EtherCAT總線運(yùn)動控制器硬件是如何進(jìn)行接線的?
正運(yùn)動技術(shù)運(yùn)動控制器EtherCAT總線快速入門
正運(yùn)動技術(shù)運(yùn)動控制器EtherCAT總線的基礎(chǔ)使用
經(jīng)濟(jì)型EtherCAT運(yùn)動控制器:EtherCAT總線快速入門
EtherCAT運(yùn)動控制器進(jìn)行自定義API封裝例程
EtherCAT運(yùn)動控制邊緣控制器功能簡介和自定義API封裝例程

EtherCAT運(yùn)動控制器在LabVIEW中的運(yùn)動控制與實時數(shù)據(jù)采集

EtherCAT運(yùn)動控制器PT/PVT實現(xiàn)用戶自定義軌跡規(guī)劃






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論