") EtherCAT科普系列(3): EtherCAT技術(shù)在伺服驅(qū)動器領(lǐng)域的應(yīng)用
EtherCAT科普系列(3): EtherCAT技術(shù)在伺服驅(qū)動器領(lǐng)域的應(yīng)用
伺服系統(tǒng)是指以位置、速度、轉(zhuǎn)矩為控制量,能夠動態(tài)跟蹤目標(biāo)變化從而實現(xiàn)自動化控制的系統(tǒng),主要包括伺服驅(qū)動器、伺服電機和編碼器,是實現(xiàn)工業(yè)自動化精密制造和柔性制造的核心技術(shù)。

▲典型伺服系統(tǒng)組成結(jié)構(gòu)圖
01
伺服電機驅(qū)動器:運動控制系統(tǒng)的“心臟”
伺服驅(qū)動器作為運動控制系統(tǒng)的驅(qū)動層和“心臟”,一般通過位置、速度和力矩三種方式對伺服電機進行控制,實現(xiàn)高精度的傳動系統(tǒng)定位。
驅(qū)動器接收控制信號并將其轉(zhuǎn)化為能夠運行電機的電流、電壓信號,進而驅(qū)動電機(執(zhí)行層)運轉(zhuǎn),帶動工作機械運行,最終實現(xiàn)機械運動高速、高精度的位移(角度)、速度、力矩控制。
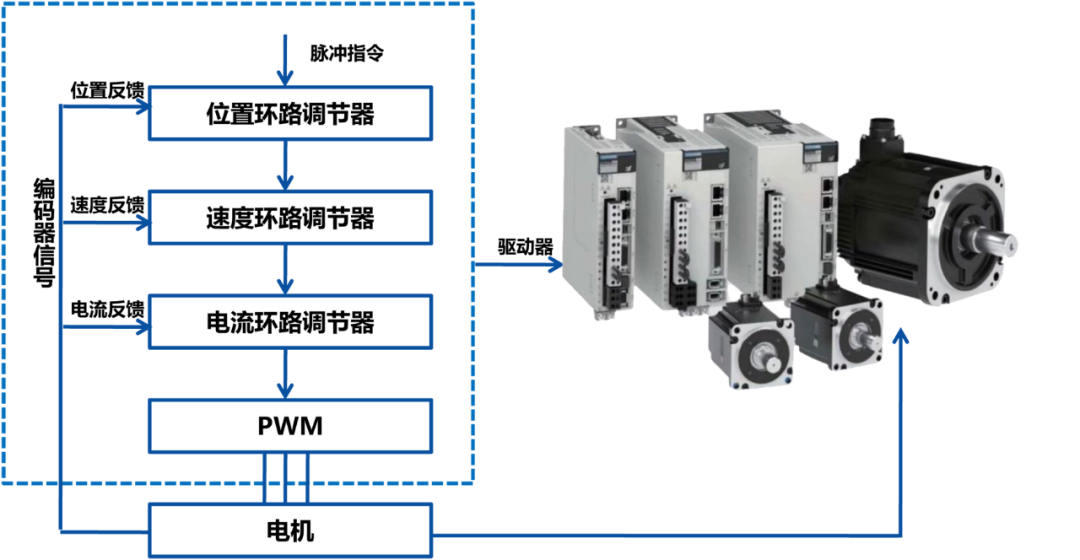
▲典型伺服驅(qū)動器工作機制圖
目前伺服驅(qū)動系統(tǒng)已廣泛應(yīng)用于工業(yè)自動化生產(chǎn)中,比如機械手、CNC 數(shù)控機床、工業(yè)機器人等領(lǐng)域,已經(jīng)成為工業(yè)自動化的重要支撐技術(shù)之一。根據(jù)格物致勝數(shù)據(jù),2023年我國工業(yè)自動化市場規(guī)模約為2601億元。其中伺服系統(tǒng)市場規(guī)模超過203億元,到2026年將達到216億元。
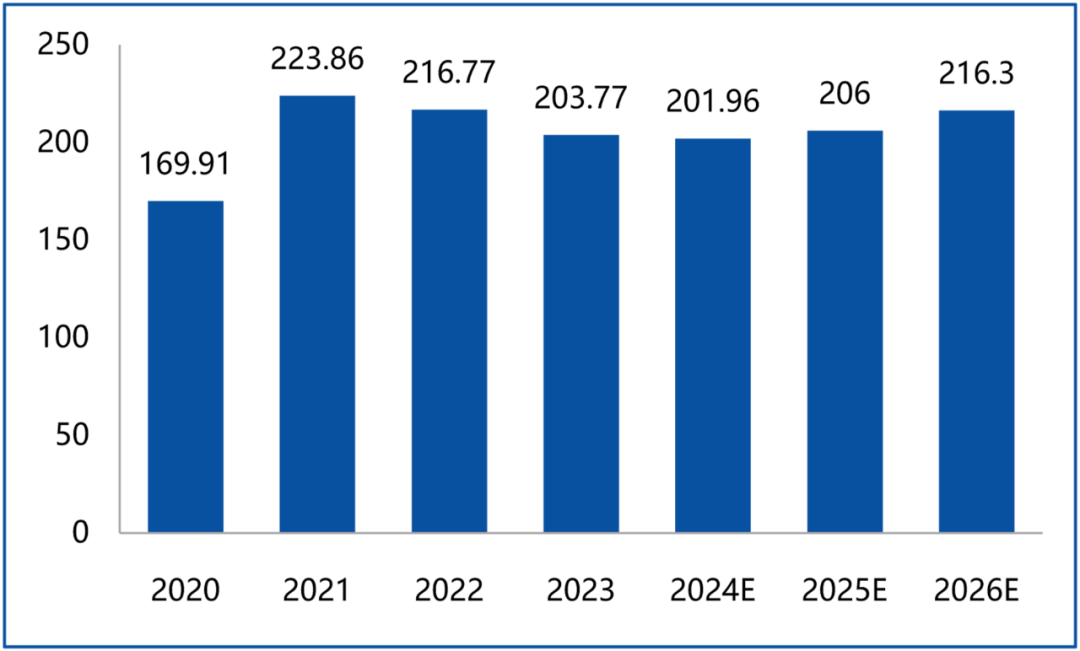
▲ 2020-2026E中國伺服系統(tǒng)市場規(guī)模及發(fā)展趨勢(數(shù)據(jù)來源:格物致勝)
02
基于EtherCAT的伺服驅(qū)動系統(tǒng)
隨著工業(yè)4.0和中國制造2025概念的陸續(xù)提出,工業(yè)自動化領(lǐng)域的伺服驅(qū)動系統(tǒng)趨于網(wǎng)絡(luò)化和智能化,大多數(shù)伺服驅(qū)動系統(tǒng)都采用了總線通信方式,實現(xiàn)復(fù)雜的運動控制功能。
傳統(tǒng)的伺服驅(qū)動系統(tǒng)由于缺乏網(wǎng)絡(luò)通信功能、開放性不強、擴展性差、系統(tǒng)兼容性差等條件的限制,已很難滿足現(xiàn)代制造業(yè)的發(fā)展需求。近年來,隨著工業(yè)以太網(wǎng)EtherCAT技術(shù)快速發(fā)展,EtherCAT技術(shù)被廣泛應(yīng)用于各種復(fù)雜的控制系統(tǒng)中,構(gòu)成網(wǎng)絡(luò)化實時運動控制系統(tǒng)結(jié)構(gòu),并具備良好的網(wǎng)絡(luò)結(jié)構(gòu)和人機交互功能,已成為伺服驅(qū)動領(lǐng)域發(fā)展的主流。
基于 EtherCAT伺服運動控制使得網(wǎng)絡(luò)伺服運動控制系統(tǒng)實時性更高(100個伺服軸的通訊僅需100us 就可為所有軸所需的參數(shù),同時還能報告其狀態(tài)參數(shù)),拓撲結(jié)構(gòu)更加靈活,可擴展性更好,安全性更高;同時有利于企業(yè)生產(chǎn)系統(tǒng)網(wǎng)絡(luò)與管理系統(tǒng)網(wǎng)絡(luò)的結(jié)合,提高現(xiàn)代制造的管理水平,改造升級現(xiàn)代制造業(yè);通過充分使用豐富的PC硬/軟件資源和低成本且可共享的網(wǎng)絡(luò)資源,有助于降低網(wǎng)絡(luò)運動控制系統(tǒng)成本。EtherCAT技術(shù)具有帶寬利用率高、兼容性好、可靠性高、抗干擾性強、拓撲靈活等優(yōu)勢特點,使其在工控界迅速普及,各家廠商紛紛推出了基于EtherCAT技術(shù)的伺服產(chǎn)品。
EtherCAT技術(shù)在伺服驅(qū)動控制領(lǐng)域的應(yīng)用優(yōu)勢包括:
1)節(jié)點與節(jié)點之間只要網(wǎng)線連接,系統(tǒng)電氣柜配線非常方便;
2)系統(tǒng)抗干擾能力強,網(wǎng)口是隔離的,整個弱電控制板的EMC特性好;
3)EtherCAT 初始化完成就可以直接讀取所有從站軸的編碼器位置;
4)SDO可以在線讀取與修改各軸的參數(shù)與增益,軸參數(shù)調(diào)試更方便;
5)可以選擇不同的 PDO數(shù)據(jù)內(nèi)容,實現(xiàn)位置轉(zhuǎn)矩速度控制,CSP(周期位置)ICSV(周期速度)/CST(周期轉(zhuǎn)矩)可以自由切換;
6)方便上位機遠程診斷和維護電氣系統(tǒng),預(yù)測性維護也更方便。
基于EtherCAT實時通信的伺服電機驅(qū)動控制系統(tǒng)主要由以下幾部分組成:工控機、伺服驅(qū)動器、EtherCAT總線、編碼器、伺服電機。
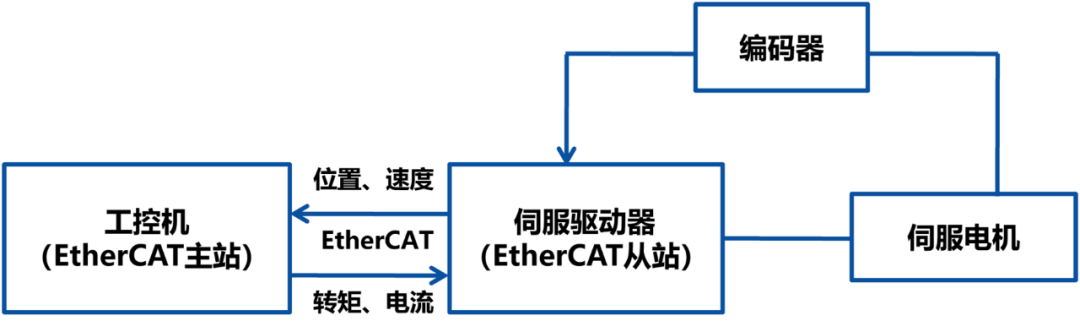
▲典型EtherCAT伺服驅(qū)動系統(tǒng)結(jié)構(gòu)圖
1)工控機配置為基于PC機的EtherCAT 主站,周期性接受從站上傳位置、速度等參數(shù),并做相應(yīng)的閉環(huán)運算,然后下發(fā)參考電流或轉(zhuǎn)矩給從站;
2)伺服驅(qū)動器作為EtherCAT從站,接受編碼器所采集的電機參數(shù),然后與主站進行數(shù)據(jù)交互,將相應(yīng)數(shù)據(jù)由EtherCAT總線周期性傳給主站,并接受主站下發(fā)數(shù)據(jù)和控制命令,并驅(qū)動伺服電機;
3)EtherCAT總線將工控機與伺服驅(qū)動器連接起來,作為主從站數(shù)據(jù)通信通道,使用100BASE-TX的5類雙絞網(wǎng)線等為其傳輸介質(zhì);
4)編碼器周期快速采集電機位置、速度參數(shù),并反饋給伺服驅(qū)動器,以便主站讀取;
5)伺服電機采用矢量控制等方式,由其伺服驅(qū)動器實現(xiàn)控制,以帶動相應(yīng)軸系運轉(zhuǎn)。
整個EtherCAT伺服電機驅(qū)動控制系統(tǒng)的重點在于EtherCAT主從站的實現(xiàn):主站采用基于PC的方式實施,由工控機配置實現(xiàn)相應(yīng)功能;從站直接采用EtherCAT伺服驅(qū)動器,已包含從站處理硬件,可通過相關(guān)配置實現(xiàn)從站通信和電機驅(qū)動功能。
基于EtherCAT的多軸伺服驅(qū)動器從站硬件構(gòu)架的主要組成部分包括網(wǎng)絡(luò)通信接口、EEPROM 存儲電路、EtherCAT從站控制器、主控微處理器及外圍電路等。
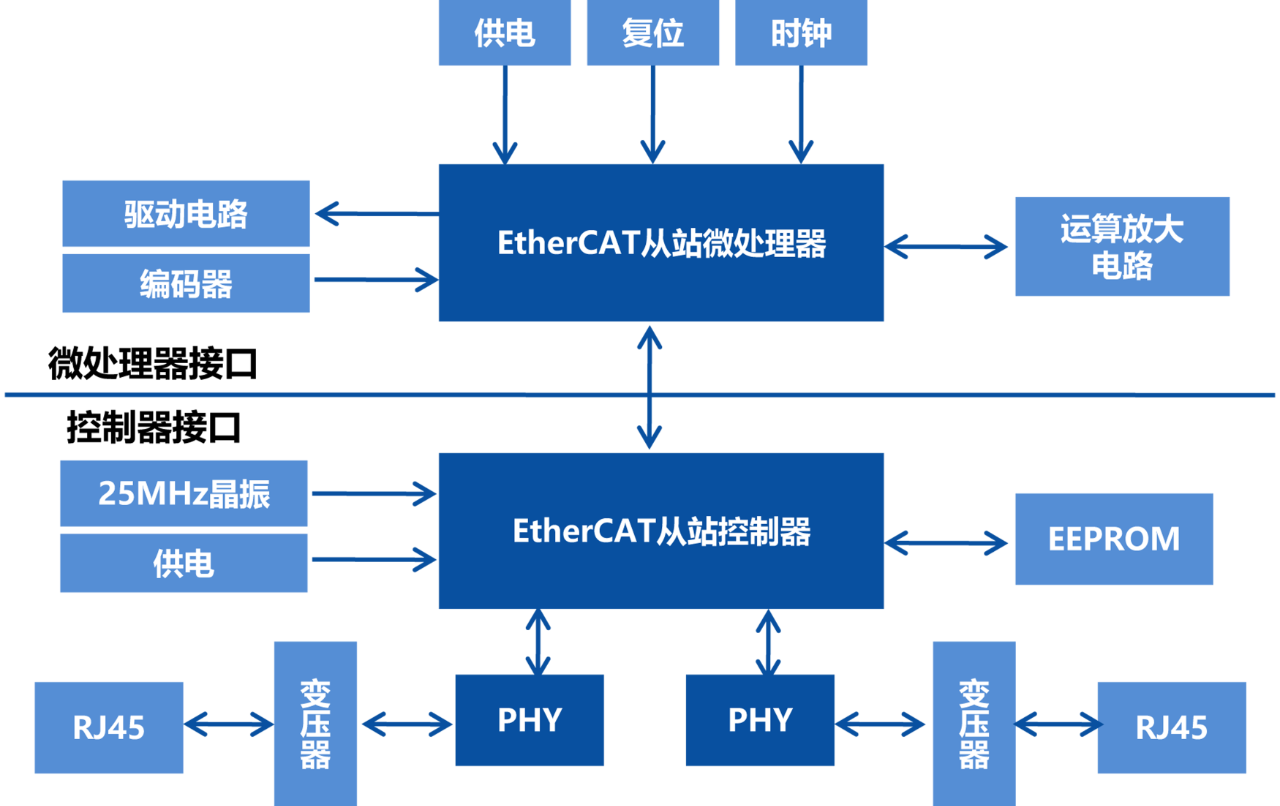
▲典型EtherCAT伺服驅(qū)動器結(jié)構(gòu)圖
EtherCAT從站控制器用于實現(xiàn)EtherCAT協(xié)議的實現(xiàn)以及數(shù)據(jù)幀的處理工作,是整個從站實現(xiàn)EtherCAT通信的核心。EtherCAT伺服從站控制器有3個主要接口,通過 RJ45 與主站或者是其他從站相連,構(gòu)成不同的拓撲結(jié)構(gòu),也是通過網(wǎng)線進行數(shù)據(jù)傳輸?shù)挠布涌冢煌ㄟ^EEPROM存儲從站設(shè)備文件信息,主站從中讀取從站信息,識別并設(shè)置從站;通過 PDI(物理數(shù)據(jù)接口)與微處理器進行數(shù)據(jù)交換。
03
碼靈半導(dǎo)體EtherCAT伺服驅(qū)動器解決方案
碼靈半導(dǎo)體CF1106系列芯片在EtherCAT伺服驅(qū)動器中的應(yīng)用優(yōu)勢:
CF1106系列芯片包含8個FMMU(現(xiàn)場總線內(nèi)存管理單元) 負責(zé)實現(xiàn)從邏輯地址到物理地址的映射,8個SyncManager(同步管理器) 可以由用戶配置方向,負責(zé) EtherCAT 工作模式的選擇和相關(guān)通信數(shù)據(jù)的訪問管理,8KB的雙端口存儲器 (DPRAM)用于存放數(shù)據(jù);支持三種PDI(過程數(shù)據(jù)接口)接口:支持32位 Digital I/O、SPI 從站接口、8/16位異步微控制器接口(μC8/16),作為從站控制器和應(yīng)用之間的數(shù)據(jù)接口;其中SPI與μC8/16方式用于連接外部微處理器,組成復(fù)雜EtherCAT從站;支持64 位分布式時鐘,分布時鐘引腳與MCU的中斷引腳連接,實現(xiàn)多個伺服從站控制任務(wù)與輸入采樣的同步;通過I2C接口連接EEPROM存儲器,存儲從站設(shè)備描述信息。CF1106系列芯片內(nèi)部集成2個10M/100Mbps以太網(wǎng)PHY,兼容IEEE 802.3u 100Base-TX、100Base-FX(僅電壓型PHY支持光纖),支持Auto-Negotiation自動協(xié)商、Auto-MDIX自動交叉識別,可使用直連或交叉線纜。對于工業(yè)應(yīng)用而言,CF1106系列內(nèi)部集成了兩個以太網(wǎng)PHY芯片,有利于系統(tǒng)高度集成,在電路設(shè)計過程中,更簡潔布線更容易。
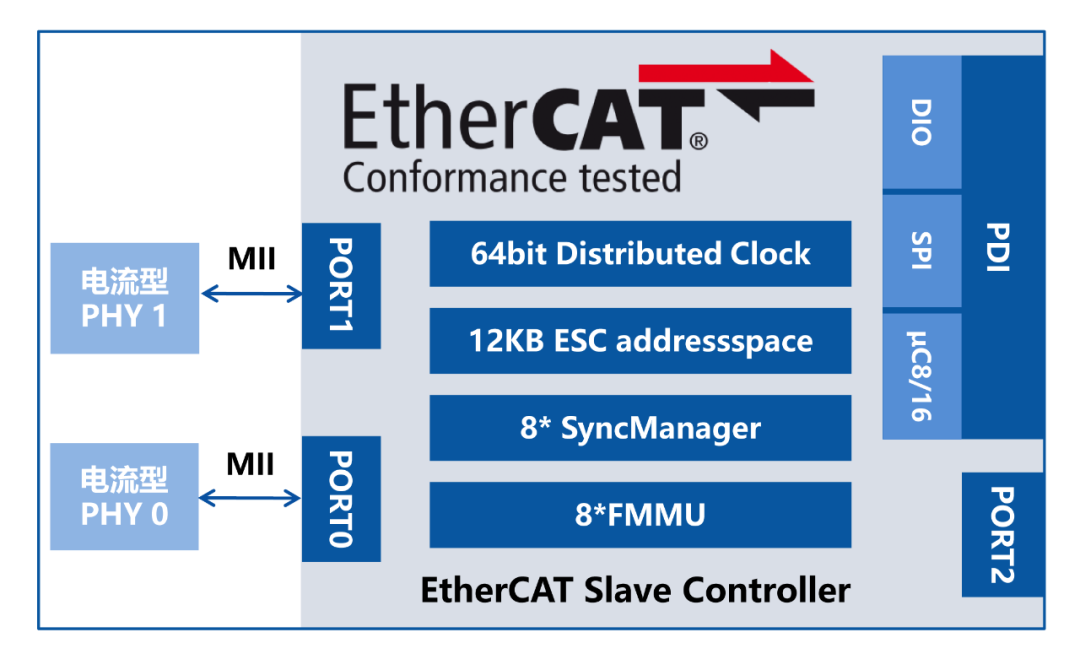
▲ 碼靈半導(dǎo)體CF1106系列芯片結(jié)構(gòu)框圖

▲ 碼靈半導(dǎo)體CF1106系列芯片實物圖
此外,與其它EtherCAT從站控制芯片相比,CF1106系列價格更低,在后期產(chǎn)品成本控制上,具有更大優(yōu)勢,可以提高產(chǎn)品市場競爭力。
隨著工業(yè)自動化的迅猛發(fā)展,EtherCAT伺服驅(qū)動器作為機電一體技術(shù)的關(guān)鍵組成部分,將標(biāo)準(zhǔn)以太網(wǎng)的優(yōu)點和工業(yè)自動化的實時性進行有機結(jié)合,兼具高效確定性的通信協(xié)議和更強大的數(shù)據(jù)處理能力適用于對動態(tài)性和精確性要求極高的伺服驅(qū)動控制系統(tǒng),降低了自動化設(shè)備成本,提高了實時響應(yīng)速度,順應(yīng)了工業(yè)自動化發(fā)展趨勢。碼靈半導(dǎo)體提供富有競爭力的EtherCAT芯片助力伺服驅(qū)動控制系統(tǒng)向開放性、柔性、互聯(lián)性、高速穩(wěn)定性、可靠性、可重構(gòu)性的方向發(fā)展。
-
編碼器
+關(guān)注
關(guān)注
45文章
3772瀏覽量
137114 -
工業(yè)自動化
+關(guān)注
關(guān)注
17文章
2652瀏覽量
68093 -
ethercat
+關(guān)注
關(guān)注
19文章
992瀏覽量
39613 -
伺服驅(qū)動器
+關(guān)注
關(guān)注
22文章
507瀏覽量
32381
發(fā)布評論請先 登錄
Ethercat轉(zhuǎn)profinet網(wǎng)關(guān)伺服驅(qū)動器連接

ethercat總線伺服如何控制 EtherCAT運行原理
通過Profinet轉(zhuǎn)EtherCAT網(wǎng)關(guān)將伺服驅(qū)動與Profinet通訊
labview下的ethercat模塊如何與驅(qū)動器通訊
EtherCAT總線運動控制的優(yōu)勢主要體現(xiàn)在哪?
經(jīng)濟型EtherCAT運動控制器:EtherCAT總線快速入門
應(yīng)用案例丨伺服驅(qū)動器連接Ethercat轉(zhuǎn)profinet網(wǎng)關(guān)
應(yīng)用案例丨通過Ethercat轉(zhuǎn)profinet網(wǎng)關(guān)控制科爾摩根驅(qū)動器
現(xiàn)場紀(jì)錄丨YE系列步進驅(qū)動器連接Ethercat轉(zhuǎn)Profinet網(wǎng)關(guān)
EtherCAT總線運動控制的優(yōu)勢主要體現(xiàn)在哪?
EtherCAT 系列交流伺服驅(qū)動器規(guī)格書
伺服驅(qū)動器連接Ethercat轉(zhuǎn)profinet網(wǎng)關(guān)應(yīng)用案例
應(yīng)用案例丨伺服驅(qū)動器連接Ethercat轉(zhuǎn)profinet網(wǎng)關(guān)
現(xiàn)場紀(jì)錄丨YE系列步進驅(qū)動器連接Ethercat轉(zhuǎn)profinet網(wǎng)關(guān)

伺服驅(qū)動器連接Ethercat轉(zhuǎn)profinet網(wǎng)關(guān)應(yīng)用






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論