") 突破200 kHz:電力電子硬件在環(huán)(HIL)測(cè)試的創(chuàng)新解決方案
突破200 kHz:電力電子硬件在環(huán)(HIL)測(cè)試的創(chuàng)新解決方案
“萬(wàn)物電氣化”影響著社會(huì)和工業(yè)的各個(gè)領(lǐng)域。為了實(shí)現(xiàn)可持續(xù)性發(fā)展的經(jīng)濟(jì)轉(zhuǎn)型,需要低成本且高效的電力電子技術(shù)來滿足各種應(yīng)用需求。這不僅要求為每個(gè)特定應(yīng)用開發(fā)拓?fù)浣Y(jié)構(gòu),還需要高效率的新型半導(dǎo)體技術(shù),例如基于碳化硅(SiC)或氮化鎵(GaN)的器件。
電動(dòng)化是能源轉(zhuǎn)型的關(guān)鍵支柱之一。在此領(lǐng)域,除了成本外,轉(zhuǎn)換器的尺寸、重量和功率(例如用于電池充電)也至關(guān)重要。為此,上述的SiC和GaN半導(dǎo)體尤為重要,因?yàn)樗鼈冎С謽O高的開關(guān)頻率,從而提高轉(zhuǎn)換器的功率密度。
測(cè)試電力電子控制單元
由于支持單相和三相電網(wǎng)充電的靈活性,車載充電器(OBC)通常采用圖騰柱配置的功率因數(shù)校正(PFC)級(jí)和用于提供額外電氣隔離的諧振(例如CLLC)轉(zhuǎn)換器。圖1展示了這種OBC的示意圖。
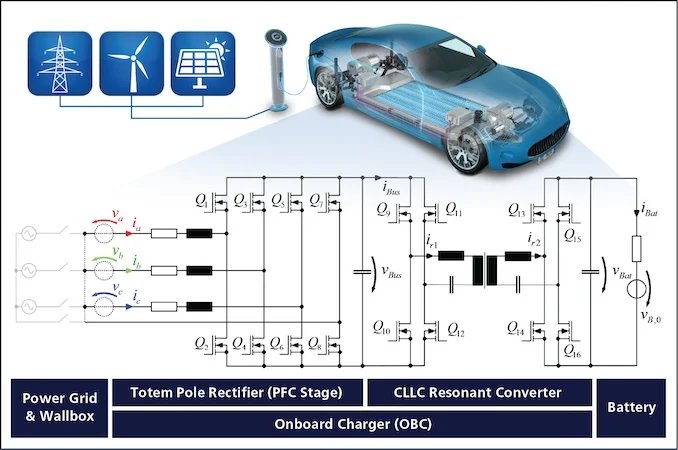 圖1
圖1可以通過離線仿真來為此類轉(zhuǎn)換器設(shè)計(jì)合適的控制器。然而,硬件在環(huán)(HIL)仿真是控制單元最終驗(yàn)證和確認(rèn)的最先進(jìn)方法。由于這些測(cè)試是在電氣信號(hào)級(jí)別進(jìn)行的,不涉及功率級(jí),因此不存在高電壓或電流,并且可以無(wú)風(fēng)險(xiǎn)地測(cè)試和重現(xiàn)短路等故障行為。
為此,需要具備實(shí)時(shí)能力的電力電子轉(zhuǎn)換器仿真模型。為了模擬準(zhǔn)連續(xù)行為,這些模型的速度必須至少比控制半導(dǎo)體的PWM頻率快二十倍。這意味著要支持500 kHz的頻率,必須實(shí)現(xiàn)最大模型步長(zhǎng)為100 ns,即需要基于FPGA的仿真模型來考慮快速結(jié)構(gòu)變化。
基于FPGA的即用型拓?fù)?/strong>
為各個(gè)拓?fù)浣Y(jié)構(gòu)使用特定的實(shí)時(shí)仿真模型是有優(yōu)勢(shì)的,因?yàn)樗鼈兡軌蛟诤侠淼腇PGA資源消耗下滿足嚴(yán)格的性能要求。dSPACE XSG電力電子系統(tǒng)(PES)庫(kù)中現(xiàn)已提供一些即用型模型,例如圖騰柱PFC整流器、兩電平逆變器、雙向DC/DC轉(zhuǎn)換器和諧振轉(zhuǎn)換器。除了可配置模型輕松集成到FPGA應(yīng)用中,庫(kù)模型還提供高仿真精度、運(yùn)行時(shí)參數(shù)化以及半導(dǎo)體或組件故障的模擬。
這些模型基于理想開關(guān)模型方法,確保高度精確的仿真結(jié)果。通過評(píng)估柵極信號(hào)以及開關(guān)器件上的電壓和電流,考慮了不同半導(dǎo)體類型(如SiC或GaN MOSFET和二極管)的行為。為此,使用所有可能的開關(guān)組合的狀態(tài)空間表示來描述動(dòng)態(tài)特性。通過并行更新并隨后執(zhí)行開關(guān)狀態(tài)檢測(cè),實(shí)現(xiàn)了所需的短步長(zhǎng)。
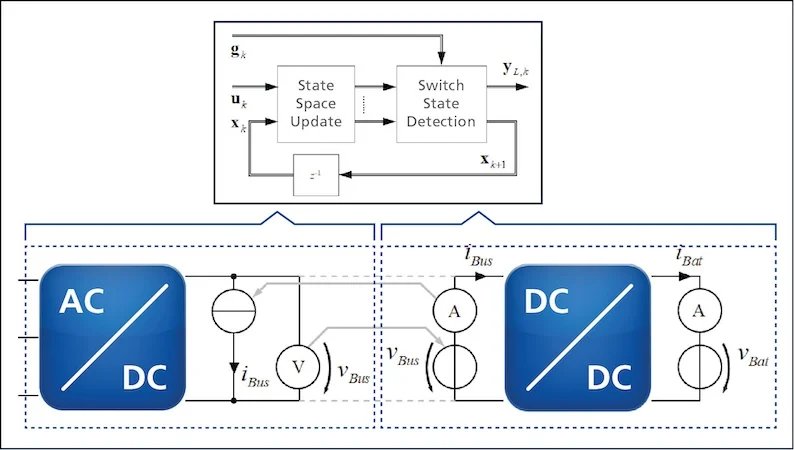 圖2
圖2此外,可配置接口使得多個(gè)拓?fù)淠P偷?a href="http://www.asorrir.com/tags/耦合/" target="_blank">耦合變得容易,如圖2所示。整流器的測(cè)量輸出電壓vBus用作DC/DC轉(zhuǎn)換器的輸入,而DC/DC轉(zhuǎn)換器汲取的電流iBus則作為整流器的負(fù)載電流輸入。這樣,不僅可以組合不同拓?fù)涞哪P停€可以輕松實(shí)現(xiàn)多相拓?fù)洌缇哂卸鄠€(gè)交錯(cuò)控制相的降壓/升壓轉(zhuǎn)換器。
車載充電器控制器的實(shí)時(shí)測(cè)試
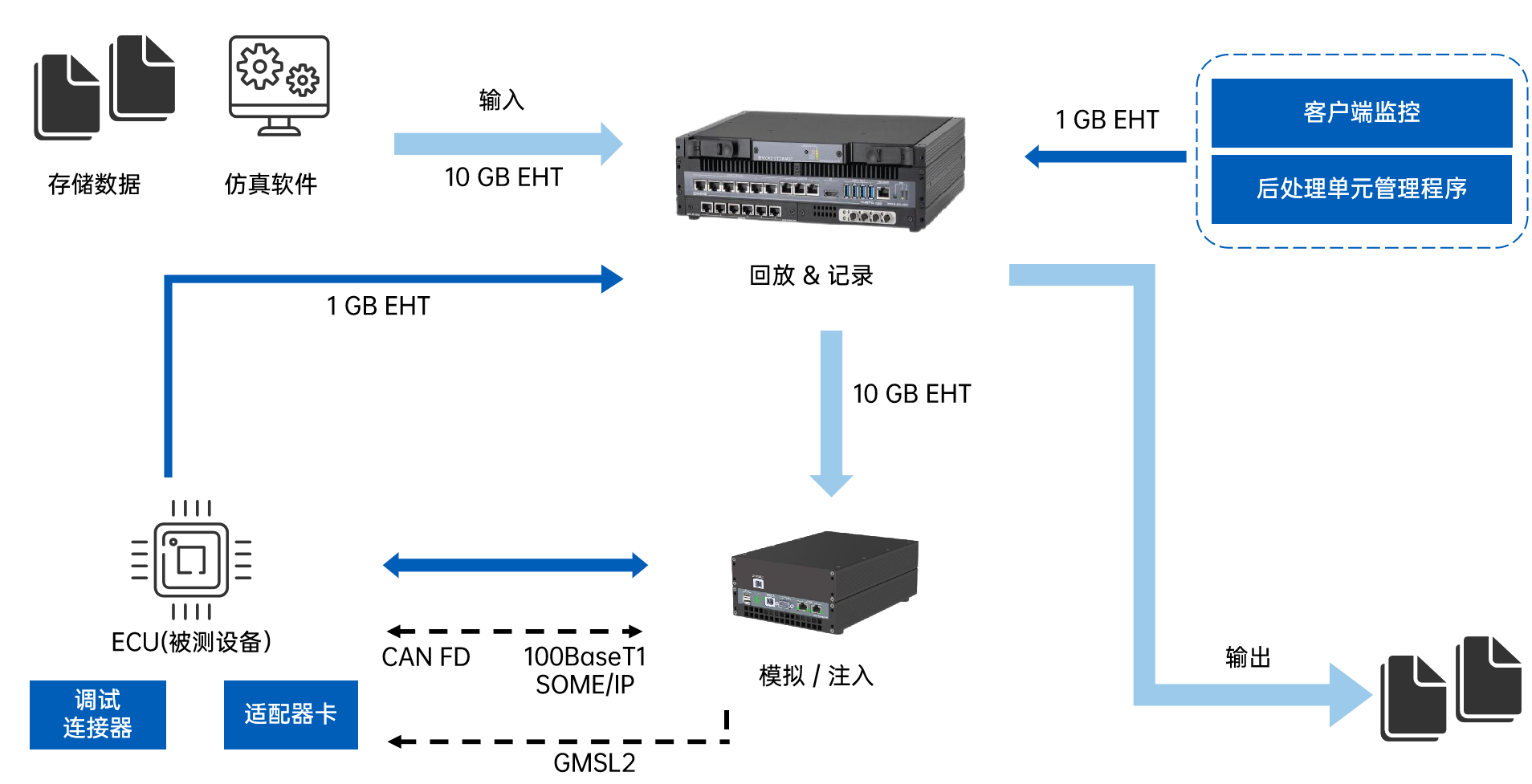
英飛凌的AURIX TC3xx提供了強(qiáng)大的實(shí)時(shí)性能,以確保在主要工作范圍內(nèi)的高效率。此外,AURIX TC4x提供了高性能解決方案,覆蓋整個(gè)工作范圍。本文中,AURIX TC4x用于展示車載充電器的最高控制性能,如圖1所示。為了集成到HIL環(huán)境中,需要建立物理連接以從控制單元讀取半導(dǎo)體的觸發(fā)信號(hào),并從HIL I/O發(fā)送回所需的電流和電壓的模擬測(cè)量值。
圖3展示了這一結(jié)構(gòu)。XSG PES庫(kù)中基于FPGA的PFC整流器和DC/DC轉(zhuǎn)換器仿真模型還包括在HIL系統(tǒng)實(shí)時(shí)處理器上實(shí)現(xiàn)的接口模型。通過這些接口,F(xiàn)PGA模型可以進(jìn)行參數(shù)化,例如在仿真運(yùn)行時(shí)更改離散化方法或更新設(shè)備參數(shù)。
FPGA上還實(shí)現(xiàn)了示波器等附加工具,允許可視化模擬的電流和電壓測(cè)量值或通過HIL系統(tǒng)的數(shù)字I/O通道捕獲的柵極信號(hào)。
執(zhí)行HIL測(cè)試時(shí),緊湊的現(xiàn)成HIL系統(tǒng)已經(jīng)足夠。本文使用了配備DS6001處理器板、DS6602 FPGA基礎(chǔ)板和DS6651多I/O模塊的SCALEXIO LabBox。
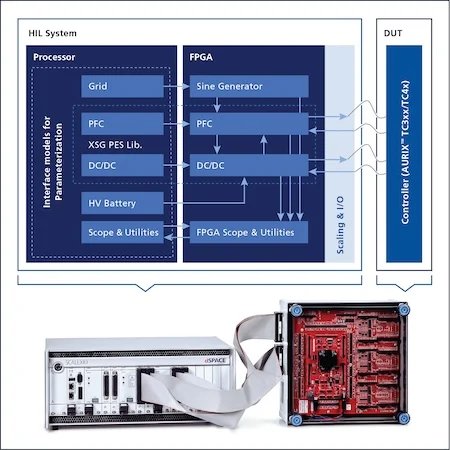 圖3
圖3圖4展示了使用ControlDesk實(shí)驗(yàn)軟件捕獲的三相50 Hz電網(wǎng)連接的閉環(huán)操作結(jié)果。PFC級(jí)以100 kHz的恒定開關(guān)頻率控制,CLLC轉(zhuǎn)換器則以200 kHz范圍內(nèi)的可變頻率控制。
電網(wǎng)電壓和電流完全同相,表明PFC操作正常。PFC控制器調(diào)整出800 V的恒定直流鏈路電壓。首先,電池以7 A的恒定電流充電。當(dāng)請(qǐng)求的電池電流增加到10 A時(shí),可以觀察到直流鏈路電流和三相電流的增加。
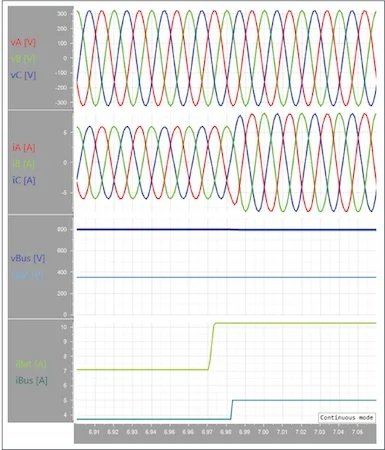 圖4
圖4下一步是什么?
電力電子控制單元的硬件在環(huán)測(cè)試需要精確且快速的電路仿真模型。特別是在汽車應(yīng)用中,寬帶隙(WBG)器件能夠以極高的開關(guān)頻率實(shí)現(xiàn)高能量密度。
為了支持更多應(yīng)用,將不斷加入新的轉(zhuǎn)換器拓?fù)淠P停珉p有源橋、相移全橋和(CL)LLC轉(zhuǎn)換器,以擴(kuò)展庫(kù)。
此外,新的建模方法將集成到即將發(fā)布的版本中。多模型平均(MMA)方法能夠以FPGA時(shí)鐘的時(shí)間分辨率考慮柵極信號(hào)。通過這種方法,可以充分利用WBG器件在MHz范圍內(nèi)的開關(guān)頻率潛力。與其他方法相比,MMA具有在不影響仿真步長(zhǎng)的情況下實(shí)現(xiàn)高PWM分辨率的顯著優(yōu)勢(shì)。因此,二極管等無(wú)源器件的開關(guān)事件也能在最短時(shí)間內(nèi)得到考慮。
-
測(cè)試
+關(guān)注
關(guān)注
8文章
5633瀏覽量
128341 -
HIL
+關(guān)注
關(guān)注
2文章
65瀏覽量
17913 -
電動(dòng)化
+關(guān)注
關(guān)注
1文章
310瀏覽量
8261 -
寬帶隙器件
+關(guān)注
關(guān)注
0文章
17瀏覽量
2616
發(fā)布評(píng)論請(qǐng)先 登錄
硬件在環(huán)(HiL)
便攜式--硬件在環(huán)仿真(HIL)
BMS硬件在環(huán)(HIL)測(cè)試系統(tǒng)方案
測(cè)試藍(lán)牙增強(qiáng)數(shù)據(jù)率產(chǎn)品的創(chuàng)新解決方案
硬件在環(huán)(HIL)測(cè)試系統(tǒng)架構(gòu)
基于HiL的轉(zhuǎn)向系統(tǒng)測(cè)試臺(tái)架解決方案
EasyGo實(shí)時(shí)仿真丨控制器硬件在環(huán)(HIL)風(fēng)電場(chǎng)景仿真測(cè)試應(yīng)用
選擇硬件在環(huán)(HIL)測(cè)試系統(tǒng)I/O接口
NI推出了針對(duì)電動(dòng)汽車硬件在環(huán)驗(yàn)證的解決方案
MCU硬件在環(huán)(HiL)仿真測(cè)試系統(tǒng)組成
探究HIL硬件在環(huán)測(cè)試
底盤系統(tǒng)硬件在環(huán)(HiL)測(cè)試解決方案

康謀方案 | 基于場(chǎng)景的端到端硬件在環(huán)(HiL)測(cè)試智能解決方案
【干貨分享】硬件在環(huán)仿真(HiL)測(cè)試

電力電子半實(shí)物仿真(HIL)原理及應(yīng)用






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論