") 智科特多模態(tài)傳感器上裝——助力你的科研、應(yīng)用工作!
智科特多模態(tài)傳感器上裝——助力你的科研、應(yīng)用工作!
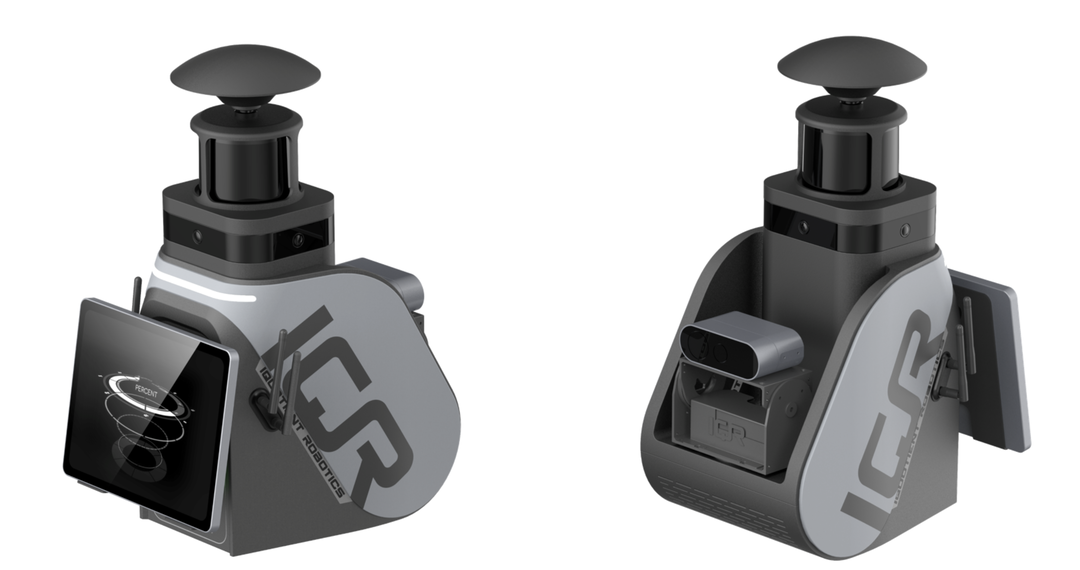
 智科特多模態(tài)傳感器上裝為移動機器人開發(fā)者打造零門檻、高精度、全融合、高性價比的環(huán)境感知解決方案,適配市場主流移動機器人產(chǎn)品,讓用戶能迅速開展科研、應(yīng)用工作。
智科特多模態(tài)傳感器上裝為移動機器人開發(fā)者打造零門檻、高精度、全融合、高性價比的環(huán)境感知解決方案,適配市場主流移動機器人產(chǎn)品,讓用戶能迅速開展科研、應(yīng)用工作。
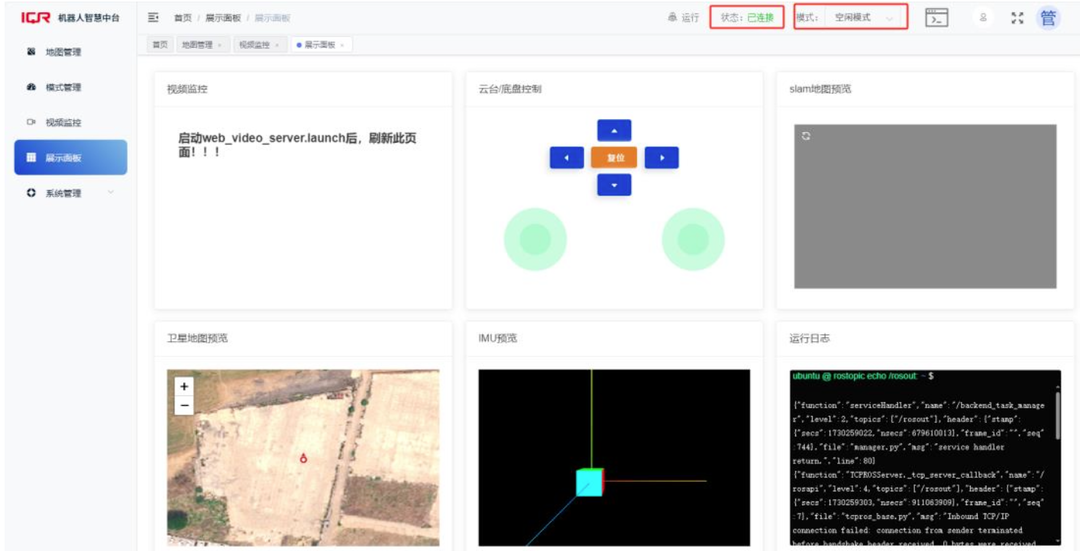
對于非機器人領(lǐng)域用戶,我們開發(fā)了完整的機器人中臺軟件,用戶可以在不操作ROS的情況下,使用機器人完成領(lǐng)域應(yīng)用。
 產(chǎn)品特點:
產(chǎn)品特點:
·操作簡單,易用性強
·提供整體的ROS包與完整URDF模型,能夠?qū)崿F(xiàn)建圖、導(dǎo)航、避障等示例代碼
·高性能傳感器適配多數(shù)科研應(yīng)用場景,軟件持續(xù)迭代
一、零門檻操作,全場景易用性設(shè)計
·即插即用,快速部署
產(chǎn)品采用標準化接口設(shè)計(USB3.0/GMSL2/網(wǎng)口/HDMI),兼容市場主流移動機器人底盤,用戶僅需物理連接即可完成硬件適配,無需復(fù)雜調(diào)試。機器人控制器提供工業(yè)級穩(wěn)定算力,支持戶外高低溫、震動等嚴苛環(huán)境。支持SLAM建圖、路徑規(guī)劃、多機協(xié)作等場景的默認功能,用戶無需配置軟件。
·非機器人領(lǐng)域用戶友好
通過機器人中臺軟件用戶無需ROS編程基礎(chǔ)即可實現(xiàn)功能調(diào)用。
集成Yolo v11目標檢測、DeepSeek 8B,可直接部署應(yīng)用。
IQR
二、全棧開發(fā)支持,科研與工程無縫銜接
·開箱即用的ROS開發(fā)生態(tài)
提供完整ROSnoetic功能包,涵蓋激光雷達點云處理、多傳感器標定、導(dǎo)航避障算法;
科研版搭載NVIDIA OrinNX,預(yù)裝CUDA,為深度學(xué)習(xí)算法提供高達100TOPS的算力支持。
·多模態(tài)數(shù)據(jù)融合框架
支持多線激光雷達、云臺深度視覺、差分GPS、IMU的系統(tǒng)集成,構(gòu)建完成的傳感器體系。

IQR
三、高性價比行業(yè)方案
對比傳統(tǒng)開發(fā)模式,智科特方案可縮短80%環(huán)境感知系統(tǒng)搭建周期;
科研用戶:直接調(diào)用預(yù)裝算法驗證理論,節(jié)省硬件調(diào)試時間;
項目應(yīng)用用戶:通過中臺軟件快速適既有機器人,降低單項目機器人使用與部署成本。
四、系列產(chǎn)品
 |  | |
| 應(yīng)用版 | 科研版 | |
| 主控制器 | 車規(guī)級控制器AD10(orin內(nèi)核) | Nvidia Orin NX |
| 主要硬件配置 | 64線/32線激光、差分GPS、IMU、云臺深度視覺系統(tǒng) | |
| 軟件系統(tǒng) | Ubuntu 20.04、ROSnoetic、Python3.8 | |
| 預(yù)裝應(yīng)用 | Yolov11、deepseek 8B、機器人定位導(dǎo)航 多機系統(tǒng)、機器人中臺v1.1 | |
| 標準接口 | USB3.0、網(wǎng)口、HDMI、機器人通信和供電口,應(yīng)用版上裝具備GMSL2接口 | |
-
傳感器
+關(guān)注
關(guān)注
2564文章
52619瀏覽量
763893 -
ROS
+關(guān)注
關(guān)注
1文章
285瀏覽量
17568
發(fā)布評論請先 登錄
光學(xué)傳感器的工作原理與應(yīng)用
氣體傳感器工作原理及分類
微壓傳感器的工作原理與應(yīng)用場景
氣壓傳感器的分類與應(yīng)用
磁通門電流傳感器的應(yīng)用及與霍爾電流傳感器的對比
線性傳感器工作原理
科沃電子(杭州)有限公司專業(yè)的傳感器服務(wù)商






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論