") 北京深圳發(fā)布具身智能行動計劃,傳感器等核心零部件被列入
北京深圳發(fā)布具身智能行動計劃,傳感器等核心零部件被列入
近日,北京、深圳相繼發(fā)布具身智能發(fā)展行動計劃,其中重點提及對傳感器、減速器、一體化關(guān)節(jié)、末端執(zhí)行器等核心零部件的研發(fā)強化:
北京發(fā)布具身智能機器人行動計劃
北京市科學(xué)技術(shù)委員會、
中關(guān)村科技園區(qū)管理委員會等部門
關(guān)于印發(fā)《北京具身智能科技創(chuàng)新與
產(chǎn)業(yè)培育行動計劃(2025-2027年)》的通知
各有關(guān)單位:
為充分發(fā)揮北京具身智能領(lǐng)域創(chuàng)新資源優(yōu)勢,加快實現(xiàn)具身智能領(lǐng)域科技創(chuàng)新和產(chǎn)業(yè)創(chuàng)新深度融合,培育人工智能發(fā)展新賽道,我們制定了《北京具身智能科技創(chuàng)新與產(chǎn)業(yè)培育行動計劃(2025-2027年)》,現(xiàn)予印發(fā),請認真執(zhí)行。
特此通知。
北京市科學(xué)技術(shù)委員會、
中關(guān)村科技園區(qū)管理委員會
北京市發(fā)展和改革委員會
北京市經(jīng)濟和信息化局
2025年2月28日
(此件主動公開)
北京具身智能科技創(chuàng)新與產(chǎn)業(yè)培育行動計劃(2025-2027年)
為充分發(fā)揮北京人工智能領(lǐng)域創(chuàng)新資源優(yōu)勢,積極搶抓具身智能發(fā)展機遇,加快實現(xiàn)具身智能科技創(chuàng)新和產(chǎn)業(yè)創(chuàng)新深度融合,培育人工智能發(fā)展新賽道,特制定本行動計劃。
一、指導(dǎo)思想
瞄準人工智能技術(shù)前沿,搶抓具身智能科技創(chuàng)新和產(chǎn)業(yè)發(fā)展關(guān)鍵期,以打造具有全球影響力的具身智能科技創(chuàng)新策源地和產(chǎn)業(yè)發(fā)展增長極為主線,立足優(yōu)勢,加強統(tǒng)籌,創(chuàng)新機制,以創(chuàng)新驅(qū)動、平臺支撐、場景牽引、生態(tài)優(yōu)化為突破著力點,激發(fā)多元創(chuàng)新主體活力,提升基礎(chǔ)軟硬件性能,強化共性支撐能力,破解場景應(yīng)用落地難題,加快營造活躍的產(chǎn)業(yè)生態(tài),把科技創(chuàng)新勢能轉(zhuǎn)化為高質(zhì)量發(fā)展動能。
二、發(fā)展目標
到2027年,原始創(chuàng)新能力顯著提升,圍繞具身大小腦模型、具身智能芯片、全身運動控制等方面突破不少于100項關(guān)鍵技術(shù),產(chǎn)出不少于10項國際領(lǐng)先的軟硬件產(chǎn)品,具身智能上下游產(chǎn)業(yè)鏈基本實現(xiàn)國產(chǎn)化。基礎(chǔ)設(shè)施建設(shè)逐步完善,建設(shè)世界模型仿真、數(shù)據(jù)采集、中試驗證、場景開放測試等一批新型研究創(chuàng)新平臺,建設(shè)統(tǒng)一的具身數(shù)據(jù)采集管理、測試驗證標準,支撐不少于100家創(chuàng)新主體開展技術(shù)創(chuàng)新,提升產(chǎn)品迭代速度。產(chǎn)業(yè)規(guī)模進一步擴大,培育產(chǎn)業(yè)鏈上下游核心企業(yè)不少于50家,形成量產(chǎn)產(chǎn)品不少于50款,在科研教育、工業(yè)商業(yè)、個性化服務(wù)三大場景實現(xiàn)不少于100項規(guī)模化應(yīng)用,量產(chǎn)總規(guī)模率先突破萬臺,培育千億級產(chǎn)業(yè)集群。產(chǎn)業(yè)生態(tài)持續(xù)優(yōu)化,建設(shè)不少于2個具身智能特色產(chǎn)業(yè)集聚區(qū),打造具身智能領(lǐng)域產(chǎn)教融合基地,營造具有國際影響力的具身智能產(chǎn)業(yè)生態(tài)。
三、重點任務(wù)
(一)引領(lǐng)具身智能軟硬件技術(shù)前沿
1.突破多模態(tài)融合感知技術(shù)
支持高校院所聯(lián)合優(yōu)勢企業(yè),研究多傳感器數(shù)據(jù)的時空同步與校準技術(shù),高效整合不同感知源數(shù)據(jù);研究跨模態(tài)學(xué)習(xí)算法,加強不同模態(tài)數(shù)據(jù)的相互作用和互相補充;研究交互式感知、主動感知、多模態(tài)數(shù)據(jù)補全等算法,實現(xiàn)規(guī)模化多模態(tài)數(shù)據(jù)高效自動對齊;研究具身環(huán)境中高效、魯棒的視覺-語言-動作多模態(tài)統(tǒng)一表征與融合方法,提升機器人感知理解能力。
2.研發(fā)具身智能“大腦”大模型
基于本市人工智能大模型產(chǎn)業(yè)基礎(chǔ),支持各類創(chuàng)新主體,構(gòu)建通用性強的多模態(tài)基礎(chǔ)大模型,可實現(xiàn)任意模態(tài)輸入輸出和多模態(tài)理解與生成。基于多模態(tài)基礎(chǔ)大模型,研發(fā)具身智能“大腦”大模型,使其具備空間物體感知、環(huán)境自主理解、復(fù)雜任務(wù)規(guī)劃等能力,實現(xiàn)具身智能機器人的復(fù)雜任務(wù)處理、動態(tài)環(huán)境適應(yīng)和未來狀態(tài)預(yù)測。研發(fā)感認知-決策-控制一體化的具身智能大模型,增強機器人的場景理解、邏輯推理、任務(wù)規(guī)劃、行為控制、人機交互、自主學(xué)習(xí)等核心能力,提升機器人在跨本體、多場景、多任務(wù)下的適應(yīng)性和泛化能力。
3.提升具身智能“小腦”技能模型能力
強化企業(yè)創(chuàng)新主體地位,鼓勵企業(yè)建立技術(shù)創(chuàng)新中心,推動技術(shù)供應(yīng)方與場景應(yīng)用方聯(lián)合開發(fā)面向具身任務(wù)的專用與通用技能模型,擴展具身智能機器人技能庫,提升復(fù)雜任務(wù)的靈巧操作能力。構(gòu)建自主決策模型,實現(xiàn)機器人實時感知理解和快速決策。研究具身智能系統(tǒng)的持續(xù)學(xué)習(xí)方法和“人在回路”的混合學(xué)習(xí)方法,實現(xiàn)機器人技能模型持續(xù)改進與環(huán)境自主適應(yīng)。
4.提高機器人運動控制性能
研究高動態(tài)運動機器人全身運動控制策略,突破模型預(yù)測控制與強化學(xué)習(xí)結(jié)合的運動控制算法,提高具身智能系統(tǒng)的控制精度和響應(yīng)速度,實現(xiàn)機器人動態(tài)平衡與自適應(yīng)調(diào)整。研究雙臂協(xié)同、手眼協(xié)同、腦身協(xié)同等技術(shù),建立數(shù)據(jù)閉環(huán)和在線學(xué)習(xí)機制,提升機器人的運動靈活性和執(zhí)行效率,實現(xiàn)對機械臂、靈巧手等不同部件的精細控制和泛化操作。搭建通用機器人運動控制算法框架,實現(xiàn)軟硬件接口模塊化和標準化設(shè)計,實現(xiàn)具身智能“大腦”在異構(gòu)機器人本體接入。
5.強化核心零部件技術(shù)創(chuàng)新和供給能力
優(yōu)化精密加工工藝,提升傳感器、減速器、一體化關(guān)節(jié)、末端執(zhí)行器等核心零部件的技術(shù)創(chuàng)新和供給能力。研發(fā)高強度耐磨材料、精密加工和組裝、高速潤滑和散熱等關(guān)鍵技術(shù),提升電機性能,延長使用壽命。研發(fā)高爆發(fā)、高精度、高動態(tài)響應(yīng)、高可靠的伺服驅(qū)動系統(tǒng)及智能一體化關(guān)節(jié),開發(fā)自適應(yīng)控制算法,提升負載能力。研制多傳感器高度集成的通用末端執(zhí)行器,研發(fā)高精度機械臂和靈巧手系統(tǒng),提升精細靈巧操作能力。研究機器人的輕量化技術(shù),研發(fā)輕質(zhì)高強度材料、柔性材料及高性能電池,提高續(xù)航能力。
6.研制國產(chǎn)高性能具身智能芯片
研制通用、高算力、高帶寬的整機智能控制芯片,為各類具身智能系統(tǒng)開發(fā)與應(yīng)用提供關(guān)鍵支撐。前瞻布局高性能人工智能大模型云端推理芯片、超低功耗的端側(cè)控制計算芯片、具備自主學(xué)習(xí)與認知決策能力的類腦芯片,打造模塊化終端通用智能模組,提升終端設(shè)備的智能性能及部署效率。開展國產(chǎn)具身智能芯片、通信模塊與具身大小腦模型、世界模型仿真平臺的系統(tǒng)適配,實現(xiàn)具身智能操作系統(tǒng)、軟件算法在具身智能機器人上的高效部署,構(gòu)建全棧國產(chǎn)化軟硬件生態(tài)。
(二)加快建設(shè)新型研究創(chuàng)新平臺
7.構(gòu)建具身智能世界模型仿真平臺
圍繞提升具身智能模擬器的可控性、交互性、4D生成和規(guī)律嵌入四個方面,研究高效可擴展、可控可交互的下一代視頻生成模型,融入物理規(guī)律與常識,構(gòu)建具身智能世界模型仿真平臺。研發(fā)世界宏觀運行規(guī)律模型,在有限輸入信息情況下,可有效模擬和預(yù)測真實世界未來狀態(tài),幫助具身智能機器人在復(fù)雜動態(tài)環(huán)境中做出更優(yōu)決策與行動。生成多樣化的合成數(shù)據(jù)訓(xùn)練樣本,減少對真實數(shù)據(jù)采集的依賴,增強機器人感知、理解、推理和通用泛化能力。
8.共建高質(zhì)量多模態(tài)通用具身數(shù)據(jù)采集平臺
構(gòu)建高保真、多模態(tài)的感知交互一體化數(shù)據(jù)生成平臺,建設(shè)虛實融合的具身智能數(shù)據(jù)采集訓(xùn)練場,支撐多種真實場景、復(fù)雜任務(wù)下的機器人動態(tài)交互數(shù)據(jù)采集。建設(shè)統(tǒng)一的具身數(shù)據(jù)采集管理標準,搭建涵蓋具身數(shù)據(jù)采集、清洗、標注、管理、共享等全流程的具身數(shù)據(jù)云平臺,建立“訓(xùn)-調(diào)-糾”全流程數(shù)據(jù)主動發(fā)現(xiàn)與利用機制,加快構(gòu)建高質(zhì)量、多模態(tài)的通用具身智能數(shù)據(jù)集。研究建立具身智能數(shù)據(jù)聯(lián)合運營和開放共享機制。
9.建設(shè)具身智能機器人中試驗證平臺
鼓勵具有智能制造經(jīng)驗的單位,建設(shè)一批開放共享的具身智能中試驗證平臺,針對核心零部件和機器人本體原型設(shè)計、柔性制造、工藝優(yōu)化、小批量生產(chǎn)在內(nèi)的全方位中試服務(wù)需求,部署3D打印、機加工、PCB(印制電路板)加工、非標部件等加工設(shè)施,設(shè)計和建造定制化的生產(chǎn)設(shè)備及工具,探索市場化運作模式,加速科技成果產(chǎn)業(yè)化進程,提高產(chǎn)品迭代速度。
10.搭建真實場景開放測試平臺
建設(shè)統(tǒng)一的測試驗證體系與標準,探索建立聯(lián)合驗證機制,提升測試驗證效率和可信度。建設(shè)海淀公園機器人開放訓(xùn)練場,搭建多場景、多任務(wù)開放物理測試環(huán)境,研究虛實融合跨場景適配技術(shù),打造可智能對抗的交互測試驗證平臺,降低仿真環(huán)境向真實場景的遷移難度,提升具身智能在仿真環(huán)境與真實場景的測試驗證一致性。
(三)推動“具身智能+”多場景示范應(yīng)用
11.擴大科研教育落地規(guī)模
探索開源開放、融資租賃、共享試用、賽事展演、教育培訓(xùn)等新型具身智能機器人推廣模式,先行推動具身智能機器人在科研教育領(lǐng)域的推廣落地。鼓勵創(chuàng)新企業(yè)與高校院所、研究機構(gòu)建立一批聯(lián)合實驗室、技術(shù)創(chuàng)新中心,合作開發(fā)新算法、新應(yīng)用,推動具身智能機器人技術(shù)升級迭代,加速科研成果轉(zhuǎn)化落地。
12.加快推動工業(yè)、商業(yè)場景規(guī)模化落地
推進科技創(chuàng)新央地協(xié)同,鼓勵汽車生產(chǎn)、電子制造、工業(yè)焊接、煤炭礦業(yè)、商業(yè)零售、倉儲配送等領(lǐng)域的央國企率先開放一批應(yīng)用場景,促進場景方和技術(shù)方深度融合、聯(lián)合研發(fā),加快行業(yè)數(shù)據(jù)積累,進一步提升具身智能機器人在分揀裝配、包裝質(zhì)檢、焊接涂裝等復(fù)雜生產(chǎn)任務(wù)和危險作業(yè)中的任務(wù)理解及自主執(zhí)行能力,加快危險、重復(fù)、繁重崗位作業(yè)的具身智能機器人替代。
13.前瞻探索個性化應(yīng)用服務(wù)
面向家庭服務(wù)、養(yǎng)老助老、醫(yī)療健康等人機共生環(huán)境進行前瞻部署,研究人機安全和深度互信機制,建立人機交互價值對齊理論,探索自主任務(wù)發(fā)現(xiàn)和規(guī)劃機制,打造人機互信的具身智能機器人。開展具身智能機器人產(chǎn)品攻關(guān),形成情感陪伴、健康監(jiān)測、異常處理、移位助行、智慧家務(wù)等具身智能個性化服務(wù)解決方案,推動具身智能機器人在養(yǎng)老機構(gòu)示范應(yīng)用。
(四)優(yōu)化具身智能產(chǎn)業(yè)生態(tài)
14.構(gòu)建全棧人才梯隊
依托高水平大學(xué)、科研機構(gòu),在全球范圍內(nèi)挖掘前沿技術(shù)研究人才,加強戰(zhàn)略科學(xué)家、領(lǐng)軍人才及青年科研人才引進和培養(yǎng)。推動高校院所設(shè)立具身智能通識教育課程,梯隊化培養(yǎng)“原始創(chuàng)新-集成創(chuàng)新-開放創(chuàng)新”的具身智能人才,建立復(fù)合型人才培養(yǎng)機制。打造具身智能領(lǐng)域產(chǎn)教融合基地,鼓勵創(chuàng)新企業(yè)與高校院所開展人才聯(lián)合培養(yǎng),加快培育一批企業(yè)急需的工程技術(shù)人才。
15.開展高水平開放合作
發(fā)揮中關(guān)村論壇、北京智源大會等系列品牌優(yōu)勢,辦好世界人形機器人“一會一賽”,打造具有國際影響力的具身智能合作交流平臺,吸引國際知名機構(gòu)落地。鼓勵科技領(lǐng)軍企業(yè)與國際頂尖高校開展項目合作,鼓勵設(shè)立海外研發(fā)中心,鼓勵創(chuàng)新主體高質(zhì)量出海,開拓國際市場。推動具身智能領(lǐng)域的科技型社會組織在標準制定推廣、國際交流合作等方面提升服務(wù)質(zhì)效,提高行業(yè)整體技術(shù)先進性和全球話語權(quán)。
16.加強企業(yè)梯度培育服務(wù)
完善企業(yè)梯次培育機制與服務(wù)體系,培育一批具身智能領(lǐng)域獨角獸企業(yè)、科技領(lǐng)軍企業(yè)、國家高新技術(shù)企業(yè)和專精特新小巨人企業(yè)。加強國家基金與市區(qū)兩級基金聯(lián)動,發(fā)揮市級人工智能產(chǎn)業(yè)投資基金、機器人產(chǎn)業(yè)發(fā)展投資基金的引導(dǎo)作用,帶動社會資本加強具身智能領(lǐng)域早期硬科技投資力度。加強撥投聯(lián)動、股債聯(lián)動等工作,構(gòu)建全方位、多層次科技金融服務(wù)生態(tài),推廣政銀合作科技金融新模式。
17.打造具身智能產(chǎn)業(yè)集聚區(qū)
積極開展市區(qū)協(xié)同,強化具身智能產(chǎn)業(yè)空間布局,打造具身智能特色產(chǎn)業(yè)集聚區(qū),加強生產(chǎn)、中試、組裝廠房的公共基礎(chǔ)設(shè)施建設(shè),為具身智能制造提供空間保障和配套設(shè)施。加強具身智能產(chǎn)業(yè)集聚區(qū)的科技服務(wù)支撐,建設(shè)一批標桿孵化器,打通前沿技術(shù)成果轉(zhuǎn)化、創(chuàng)業(yè)孵化和產(chǎn)業(yè)化服務(wù)支撐鏈條,促進一批前沿硬科技成果在集聚區(qū)轉(zhuǎn)化落地,加速一批青年科學(xué)家創(chuàng)新創(chuàng)業(yè)。
強化部市區(qū)聯(lián)動,發(fā)揮國家級具身智能平臺作用,加強資源統(tǒng)籌,系統(tǒng)推進技術(shù)攻關(guān)、產(chǎn)業(yè)發(fā)展、場景建設(shè)工作,在產(chǎn)業(yè)規(guī)劃布局、空間集聚建設(shè)、重大項目落地等方面強化頂層謀劃,用好政策體系,推動責(zé)任落實,積極爭取國家級項目落地。以創(chuàng)新聯(lián)合體、揭榜掛帥、賽馬制等項目組織方式,鼓勵多元主體聯(lián)合打造新型研究創(chuàng)新平臺,促進資源共享和優(yōu)勢互補,圍繞具身智能前沿技術(shù)及產(chǎn)業(yè)應(yīng)用開展協(xié)同創(chuàng)新,提升企業(yè)技術(shù)創(chuàng)新能力。加強技術(shù)與場景供需對接,開展產(chǎn)業(yè)動態(tài)跟蹤和評估,優(yōu)化資源協(xié)同配置,加大多部門資金聯(lián)動,加強科技倫理治理和風(fēng)險防控水平,加快培育具身智能產(chǎn)業(yè)集群。
本計劃自印發(fā)之日起實施,執(zhí)行至2027年12月31日截止。實施期間如遇國家和本市相關(guān)政策調(diào)整,按照國家和本市最新政策規(guī)定執(zhí)行。
深圳發(fā)布具身智能機器人行動計劃
今天,深圳市科技創(chuàng)新局發(fā)布了《深圳市具身智能機器人技術(shù)創(chuàng)新與產(chǎn)業(yè)發(fā)展行動計劃(2025-2027年)》(以下簡稱《行動計劃》),提到將通過引領(lǐng)本體制造和靈巧手等多項核心技術(shù)攻堅突破、打造公共服務(wù)平臺矩陣,以及營造科技創(chuàng)新生態(tài)特別是準備開放50個以上應(yīng)用場景,推動深圳具身智能機器人產(chǎn)業(yè)綜合實力達到國際領(lǐng)先水平。
從技術(shù)突破、產(chǎn)業(yè)規(guī)模到產(chǎn)業(yè)生態(tài),《行動計劃》將通過三年時間實現(xiàn)以下目標:
在機器人關(guān)鍵核心零部件、AI芯片、人工智能與機器人融合技術(shù)、多模態(tài)感知技術(shù)、高精度運動控制技術(shù)、靈巧操作技術(shù)等方面取得突破。
新增培育估值過百億企業(yè)10家以上、營收超十億企業(yè)20家以上,實現(xiàn)十億級應(yīng)用場景落地50個以上,關(guān)聯(lián)產(chǎn)業(yè)規(guī)模達到1000億元以上,具身智能機器人產(chǎn)業(yè)集群相關(guān)企業(yè)超過1200家。
打造公共服務(wù)平臺矩陣,吸引更多上下游企業(yè)、科研機構(gòu)、創(chuàng)新團隊等加入,形成更完善的產(chǎn)業(yè)生態(tài)。
為此,《行動計劃》準備在三大方面展開部署:
一是引領(lǐng)核心技術(shù)攻堅突破。《行動計劃》將重點支持具身智能機器人關(guān)鍵核心技術(shù)攻關(guān),以揭榜掛帥、項目經(jīng)理人制、業(yè)主制等方式分階段、分批次組織實施科技重大專項。具體來說,主要從五大方向進行突破: 1、核心零部件。攻關(guān)高能量密度的微小電機及驅(qū)動技術(shù),研制高精密微型一體化關(guān)節(jié)模組。攻關(guān)六維力、電子皮膚、多維觸覺感知技術(shù),研制高精度視、觸、力等多模態(tài)傳感器。研制高性能、高集成度的類腦視覺傳感器。研制高能量密度、輕量化電池。
2、機器人AI芯片。研究集神經(jīng)網(wǎng)絡(luò)處理器指令集架構(gòu)、存算一體計算架構(gòu)、異構(gòu)多核架構(gòu)、低功耗模式及算法工具鏈于一體的新型AI芯片架構(gòu)。研發(fā)支持Chiplet集成擴展、具身智能VLA/VTLA端到端大模型和多模態(tài)大模型推理加速、認知推理類腦芯片、低延時驅(qū)動接口、多傳感接口、低功耗的機器人AI芯片。
3、高性能仿生多指靈巧手。突破仿生精細化結(jié)構(gòu)、輕量化高強度材料與類肌肉驅(qū)動技術(shù),研制具備高載荷、高靈活性、精細操作能力的仿生多指靈巧手。研究靈巧手多自由度運動、多指協(xié)同、指關(guān)節(jié)動態(tài)柔順等控制算法,攻關(guān)手-眼-腦協(xié)同的靈巧操作技術(shù)。
4、具身智能基座及垂直領(lǐng)域大模型。基于世界模型及視覺-觸覺-語言-動作(VTLA)等多模態(tài)輸入輸出,構(gòu)建具備交互、預(yù)測與決策能力的具身智能基座大模型及其訓(xùn)練、推理技術(shù)體系,形成長序列推理(COT)和自主學(xué)習(xí)能力,支持跨場景任務(wù)處理。圍繞重點應(yīng)用場景,研發(fā)垂直應(yīng)用大模型。
5、突破具身智能本體控制技術(shù)。研究基于人體數(shù)據(jù)驅(qū)動的雙臂、雙腿、腰腹核心協(xié)同控制技術(shù),突破基于人臂運動特性的協(xié)調(diào)作業(yè)軌跡規(guī)劃技術(shù)與非線性實時下肢協(xié)同控制技術(shù)。
二是打造公共服務(wù)平臺矩陣。《行動計劃》將組建起包括福田實驗室、光明實驗室等的具身智能機器人領(lǐng)域市重點實驗室,打造一批創(chuàng)新服務(wù)平臺、檢驗檢測平臺與中小試基地,并且構(gòu)建跨本體多樣性開源數(shù)據(jù)集、通過“訓(xùn)力券”強化對具身智能模型訓(xùn)力支撐。 三是營造最優(yōu)科技創(chuàng)新生態(tài)。《行動計劃》將支持具身智能機器人企業(yè)建設(shè)制造工廠、支持首臺(套)應(yīng)用和爆款產(chǎn)品培育,以及強化供應(yīng)鏈協(xié)同創(chuàng)新,在資金和空間上加大對具身智能機器人產(chǎn)業(yè)鏈發(fā)揮引領(lǐng)性作用的企業(yè)的支持力度。 另外,《行動計劃》還會加快開放應(yīng)用場景,將聚焦政務(wù)服務(wù)、工業(yè)制造、教育、醫(yī)療健康、交通、氣象、經(jīng)濟運行、公共安全、生態(tài)環(huán)保等重點領(lǐng)域,滾動開放不少于50個應(yīng)用場景。
《深圳市具身智能機器人技術(shù)創(chuàng)新與產(chǎn)業(yè)發(fā)展行動計劃(2025-2027年)》原文如下:
為搶抓全球人工智能與機器人技術(shù)融合發(fā)展的戰(zhàn)略機遇,加速構(gòu)建具身智能機器人產(chǎn)業(yè)創(chuàng)新生態(tài),推動具身智能機器人產(chǎn)業(yè)高質(zhì)量跨越式發(fā)展,加快建設(shè)國際國內(nèi)領(lǐng)先的具身智能機器人產(chǎn)業(yè)集聚區(qū),加快打造具有全球重要影響力的產(chǎn)業(yè)科技創(chuàng)新中心,按照《關(guān)于加快發(fā)展新質(zhì)生產(chǎn)力進一步推進戰(zhàn)略性新興產(chǎn)業(yè)集群和未來產(chǎn)業(yè)高質(zhì)量發(fā)展的實施方案》《深圳市加快打造人工智能先鋒城市行動方案》《深圳市培育發(fā)展未來產(chǎn)業(yè)行動計劃(2024-2025年)》等文件要求,結(jié)合我市實際,制定本行動計劃。
一、發(fā)展目標 到2027年,在機器人關(guān)鍵核心零部件、AI芯片、人工智能與機器人融合技術(shù)、多模態(tài)感知技術(shù)、高精度運動控制技術(shù)、靈巧操作技術(shù)等方面取得突破。新增培育估值過百億企業(yè)10家以上、營收超十億企業(yè)20家以上,實現(xiàn)十億級應(yīng)用場景落地50個以上,關(guān)聯(lián)產(chǎn)業(yè)規(guī)模達到1000億元以上,具身智能機器人產(chǎn)業(yè)集群相關(guān)企業(yè)超過1200家。打造公共服務(wù)平臺矩陣,吸引更多上下游企業(yè)、科研機構(gòu)、創(chuàng)新團隊等加入,形成更完善的產(chǎn)業(yè)生態(tài),具身智能機器人產(chǎn)業(yè)綜合實力達到國際領(lǐng)先水平。
二、重點任務(wù)
(一)引領(lǐng)核心技術(shù)攻堅突破 重點支持具身智能機器人核心零部件、AI芯片、仿生靈巧手、基座 1.開展核心零部件攻關(guān)。攻關(guān)高能量密度的微小電機及驅(qū)動技術(shù),研制高精密微型一體化關(guān)節(jié)模組。攻關(guān)六維力、電子皮膚、多維觸覺感知技術(shù),研制高精度視、觸、力等多模態(tài)傳感器。研制高性能、高集成度的類腦視覺傳感器。研制高能量密度、輕量化電池。 2.加大機器人AI芯片攻關(guān)。研究集神經(jīng)網(wǎng)絡(luò)處理器指令集架構(gòu)、存算一體計算架構(gòu)、異構(gòu)多核架構(gòu)、低功耗模式及算法工具鏈于一體的新型AI芯片架構(gòu)。研發(fā)支持Chiplet集成擴展、具身智能VLA/VTLA端到端大模型和多模態(tài)大模型推理加速、認知推理類腦芯片、低延時驅(qū)動接口、多傳感接口、低功耗的機器人AI芯片。研制機器人端側(cè)計算芯片及模組,推進國產(chǎn)化替代。 3.研制高性能仿生多指靈巧手。突破仿生精細化結(jié)構(gòu)、輕量化高強度材料與類肌肉驅(qū)動技術(shù),研制具備高載荷、高靈活性、精細操作能力的仿生多指靈巧手。研究靈巧手多自由度運動、多指協(xié)同、指關(guān)節(jié)動態(tài)柔順等控制算法,攻關(guān)手-眼-腦協(xié)同的靈巧操作技術(shù)。 4.構(gòu)建具身智能基座及垂直領(lǐng)域大模型。基于世界模型及視覺-觸覺-語言-動作(VTLA)等多模態(tài)輸入輸出,構(gòu)建具備交互、預(yù)測與決策能力的具身智能基座大模型及其訓(xùn)練、推理技術(shù)體系,形成長序列推理(COT)和自主學(xué)習(xí)能力,支持跨場景任務(wù)處理。圍繞重點應(yīng)用場景,研發(fā)垂直應(yīng)用大模型。 5.突破具身智能本體控制技術(shù)。研究基于人體數(shù)據(jù)驅(qū)動的雙臂、雙腿、腰腹核心協(xié)同控制技術(shù),突破基于人臂運動特性的協(xié)調(diào)作業(yè)軌跡規(guī)劃技術(shù)與非線性實時下肢協(xié)同控制技術(shù)。
(二)打造公共服務(wù)平臺矩陣 6.高標準推進重點實驗室建設(shè)。支持福田實驗室突破具身智能感知、移動、決策、交互等關(guān)鍵核心技術(shù),打造前沿開放的具身智能平臺底座。支持光明實驗室建設(shè)大灣區(qū)昇騰算力應(yīng)用創(chuàng)新研究院,推動昇騰AI算子開發(fā)和開源社區(qū)生態(tài)建設(shè)。支持組建具身智能機器人領(lǐng)域市重點實驗室。 7.高能級打造創(chuàng)新服務(wù)平臺。支持國際先進技術(shù)應(yīng)用推進中心(深圳)建設(shè)具身智能技術(shù)試驗場,推動場景應(yīng)用落地。支持深圳市人工智能與機器人研究院建設(shè)廣東省具身智能機器人創(chuàng)新中心,帶動產(chǎn)業(yè)上下游協(xié)同開展技術(shù)攻關(guān)和產(chǎn)業(yè)應(yīng)用。面向具身智能領(lǐng)域建設(shè)開放創(chuàng)新平臺、開源社區(qū)、評測適配中心、創(chuàng)新中心等公共技術(shù)服務(wù)平臺,配置通用模型庫等產(chǎn)業(yè)鏈上下游資源并開放共享。支持企業(yè)在國內(nèi)人才聚集地建立研發(fā)中心。 8.高水平布局檢驗檢測平臺與中小試基地。開展具身智能機器人測試和評價關(guān)鍵技術(shù)研究,制定檢驗檢測方法,加強關(guān)鍵檢測設(shè)備及裝置研發(fā)。制定具身智能機器人認證標準和流程,打造國家級檢測認證機構(gòu),完善評測配套工具。布局概念驗證中心、中小試基地等產(chǎn)業(yè)創(chuàng)新服務(wù)載體。 9.構(gòu)建跨本體多樣性開源數(shù)據(jù)集。研究具身數(shù)據(jù)采集解耦、遙操作與人類示教等方法,開展具身數(shù)據(jù)采集關(guān)鍵技術(shù)攻關(guān)。面向典型垂直應(yīng)用領(lǐng)域,搭建技術(shù)試驗場,基于視、觸、力、位等多模態(tài)數(shù)據(jù)要素,開發(fā)真機數(shù)據(jù)采集平臺和數(shù)據(jù)仿真平臺。利用設(shè)備共享平臺豐富數(shù)據(jù)來源,提升數(shù)據(jù)集的多樣性和適用性。鼓勵牽頭和參與制定具身數(shù)據(jù)采集領(lǐng)域的地方、國家、國際標準,生成并發(fā)布開源數(shù)據(jù)集。 10.強化具身智能模型訓(xùn)力支撐。通過“訓(xùn)力券”加大力度支持企業(yè)、高校和科研機構(gòu)租用市內(nèi)外智能算力開展具身智能模型訓(xùn)練和應(yīng)用。 11.推進標準體系建設(shè)和知識產(chǎn)權(quán)保護。圍繞具身智能機器人軟硬件接口、評價測試、場景應(yīng)用、安全、倫理等領(lǐng)域制定一批標準。支持組建深圳市具身智能機器人標準化技術(shù)委員會。打造深圳市知識產(chǎn)權(quán)“一站式”協(xié)同保護平臺。
(三)營造最優(yōu)科技創(chuàng)新生態(tài) 12.提升規(guī)模化制造能力。支持具身智能機器人企業(yè)建設(shè)制造工廠,將其實施的重點工業(yè)投資項目納入《工業(yè)項目名錄》。 13.支持首臺(套)應(yīng)用和爆款產(chǎn)品培育。重點支持具身智能機器人企業(yè)提升產(chǎn)品研發(fā)技術(shù)水平,推動新產(chǎn)品、新技術(shù)首次應(yīng)用和產(chǎn)業(yè)化,積極培育具備競爭力的爆款產(chǎn)品。 加快開放應(yīng)用場景。聚焦政務(wù)服務(wù)、工業(yè)制造、教育、醫(yī)療健康、交通、氣象、經(jīng)濟運行、公共安全、生態(tài)環(huán)保等重點領(lǐng)域,滾動開放不少于50個應(yīng)用場景。 15.強化供應(yīng)鏈協(xié)同創(chuàng)新。成立具身智能機器人產(chǎn)業(yè)聯(lián)盟,促進整機廠商與零部件供應(yīng)商的合作。鼓勵下游企業(yè)積極試用聯(lián)盟成員企業(yè)研制的具身智能機器人產(chǎn)品。 16.精準服務(wù)“鏈主”企業(yè)。支持龍頭企業(yè)自主創(chuàng)新,做大做強,精準服務(wù)在具身智能機器人產(chǎn)業(yè)鏈發(fā)揮引領(lǐng)性作用的企業(yè),在資金、空間等方面加大支持力度。 17.支持企業(yè)出海拓展。建設(shè)服務(wù)全球的具身智能機器人核心零部件交易平臺。為企業(yè)提供海外市場信息、法律法規(guī)咨詢、人才招聘等服務(wù)。支持企業(yè)出海開拓國際市場,簡化具身智能機器人產(chǎn)品出口通關(guān)流程,提高通關(guān)效率,降低企業(yè)成本。 18.深化行業(yè)交流合作。舉辦高交會、靈巧手大賽等具有國際影響力的論壇、展會、賽事等行業(yè)活動。鼓勵企業(yè)、高校和科研機構(gòu)開展國際交流合作。
三、保障措施 組建產(chǎn)業(yè)專班,統(tǒng)籌協(xié)調(diào)職能部門、重點承載區(qū)、高校院所及企業(yè)主體,建立產(chǎn)業(yè)發(fā)展動態(tài)監(jiān)測、前沿技術(shù)研判和政策規(guī)劃協(xié)同機制,深化產(chǎn)業(yè)頂層設(shè)計;實施頂尖人才引育工程與科技創(chuàng)新人才專項,完善校企聯(lián)合培養(yǎng)體系,夯實產(chǎn)業(yè)發(fā)展人才支撐;聚焦具身智能機器人、靈巧手等細分領(lǐng)域建設(shè)專業(yè)化園區(qū),以機器人劇場、未來街區(qū)等創(chuàng)新形式打造機器人友好示范園區(qū),強化產(chǎn)業(yè)生態(tài)空間承載。
審核編輯 黃宇
-
傳感器
+關(guān)注
關(guān)注
2563文章
52573瀏覽量
763725 -
具身智能
+關(guān)注
關(guān)注
0文章
113瀏覽量
383
發(fā)布評論請先 登錄
汽車零部件檢測功能性測試技術(shù)

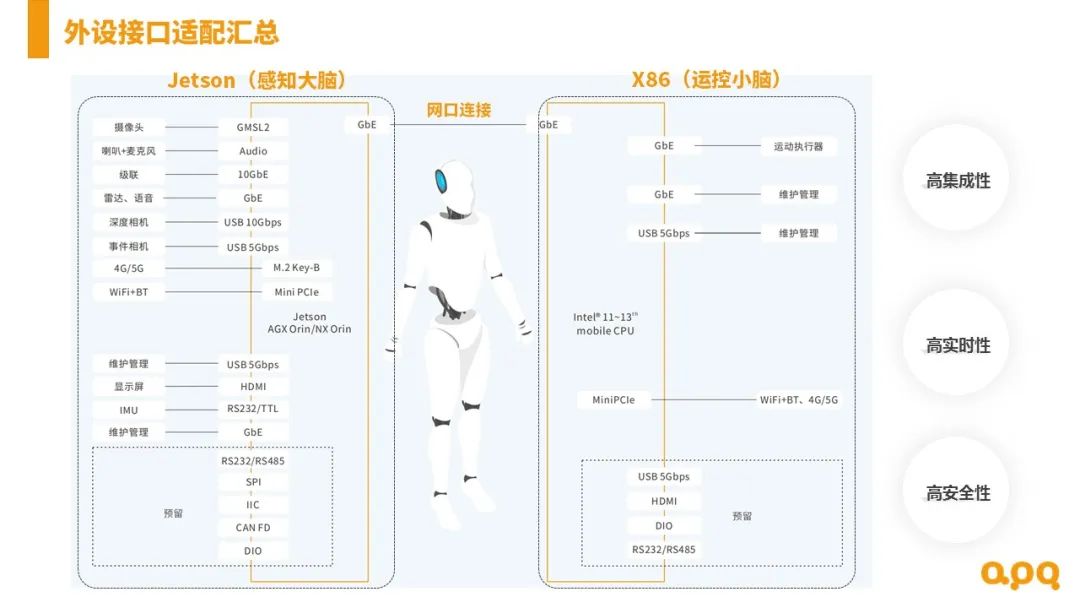
從感知到運控:具身智能機器人控制器的雙腦協(xié)同設(shè)計與場景適配
阿童木雙片檢測傳感器在汽車零部件沖壓產(chǎn)線的應(yīng)用

具身智能時代來臨,靈途科技助力人形機器人“感知升級”
智能零部件管理助力中電思儀的標準化管理
AIM有限公司有效控制零部件的野蠻增長并優(yōu)化企業(yè)流程
國產(chǎn)工業(yè)核心零部件崛起背后,華丞電子的智慧與突破

【「具身智能機器人系統(tǒng)」閱讀體驗】2.具身智能機器人的基礎(chǔ)模塊
【「具身智能機器人系統(tǒng)」閱讀體驗】1.初步理解具身智能
《具身智能機器人系統(tǒng)》第1-6章閱讀心得之具身智能機器人系統(tǒng)背景知識與基礎(chǔ)模塊
3D 視覺定位技術(shù):汽車零部件制造的智能變革引擎
激光淬火技術(shù)在淬火發(fā)動機零部件的工藝應(yīng)用






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論