 增量式編碼器原理介紹
增量式編碼器原理介紹
一 增量式編碼器原理介紹
增量式編碼器是一種將位移信息轉換成周期性電信號,再將電信號轉換成脈沖計數的裝置。
通常增量式編碼器的接線輸出為兩根電源線,A,B,Z三個脈沖信號。其中可以通過A,B信號的相位關系來判斷編碼器的旋轉方向,可以人為規定若A相在前,B相落后90o 則為正方向,反之為負方向。
旋轉角度的計算也很簡單,
順時針:
θ = ( k + 1 ) ? 360 分 辨 率 heta=(k+1)*frac{360}{分辨率} θ=(k+1)?分辨率360
逆時針:
θ = ( 分 辨 率 ? ( k + 1 ) ) ? 360 分 辨 率 heta=(分辨率-(k+1))*frac{360}{分辨率} θ=(分辨率?(k+1))?分辨率360
每旋轉過一個單位刻度,A,B相都會產生一個脈沖,Z相信號是每轉一圈產生一個周期的高電平。
倍頻: 實際應用中往往會采用兩倍頻或者四倍頻的方式來提高精度,一個周期內 A,B相的信號都會產生四次邊沿跳變,兩倍頻可以在上升沿,下降沿各計數一次;四倍頻則是每個邊沿變化都計數。
兩倍頻計數規則: 在A或B的上升、下降沿都計數。
四倍頻計數規則: 當A為高電平時,B在上升沿則加1,下降沿則減1;A為低電平時,B在下降沿則減1,上升沿則加1;B為高電平時,A在上升沿則減1,下降沿則加1;在B為低電平時,A在上升沿則加1,下降沿則減1。
PUL =(A1 ^ B2) ^ (A2 ^ B1)
二 硬件實現
在查閱資料論文后,發現大部分都是采用的是三個模塊:頂層模塊;倍頻鑒相模塊,以及計數模塊。
其實完全可以綜合為一個模塊同時完成倍頻鑒相計數工作。代碼參考這位大佬
`timescale 1ns / 1ps module bianmaqi2(clk,rst_n ,quadA, quadB, position_out,A,B,DIR,index); input clk,rst_n, quadA, quadB,index; output [15:0] position_out; output A,B,DIR; reg [2:0] quadA_delayed, quadB_delayed; reg A,B,DIR; reg [15:0] position; always @(posedge clk) quadA_delayed <= {quadA_delayed[1:0], quadA}; always @(posedge clk) quadB_delayed <= {quadB_delayed[1:0], quadB}; //輸入緩存打拍 wire count_enable = quadA_delayed[1] ^ quadA_delayed[2] ^ quadB_delayed[1] ^ quadB_delayed[2]; //PUL =(A1^B2)^(A2^B1) wire count_direction = quadA_delayed[1] ^ quadB_delayed[2]; //DIR = C^D C是A1打一拍 D是B1打兩拍 always @(posedge osc or negedge rst_n ) begin if(!rst_n)begin position<=16'd0; A<=0; B<=0; DIR<=0; //復位信號 必須有復位信號來賦初值 否則在testbench中輸出為高阻態 end else if(count_enable) begin if(count_direction) position<=position+1'b1; else position<=position-1'b1; A <= quadA_delayed[2]; B <= quadB_delayed[2]; DIR <= count_direction; end else position<=position; end assign position_out = position; endmodule
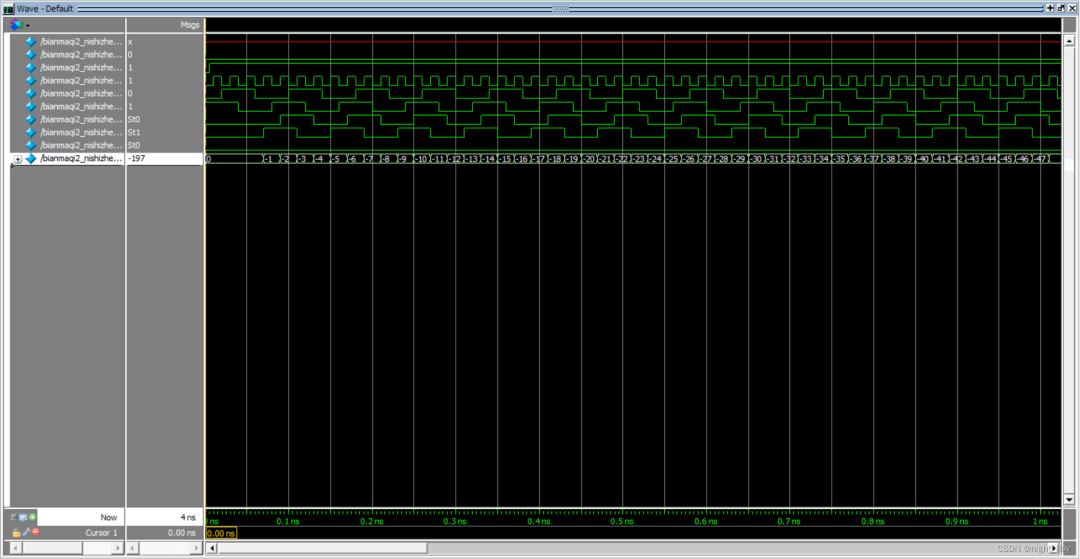
三 測試平臺
分別測試正轉和反轉;
正轉即A比B超前90°;反轉即B比A超前90°。
`timescale 1 ps/ 1 ps module bianmaqi2_tb(); // constants // general purpose registers reg eachvec; // test vector input registers reg index; reg rst_n; reg osc; reg quadA; reg quadB; // wires wire A; wire B; wire DIR; wire [15:0] position_out; // assign statements (if any) bianmaqi2 i1 ( // port map - connection between master ports and signals/registers .A(A), .B(B), .rst_n(rst_n), .DIR(DIR), .index(index), .osc(osc), .position_out(position_out), .quadA(quadA), .quadB(quadB) ); initial begin //initialize inputs rst_n=1'b0; osc=1'b0; quadA =1; quadB =0; index =0; #5 rst_n=1'b1; end initial begin repeat(50)begin #20 quadB=1; #20 quadA=0; #20 quadB=0; #20 quadA=1; end $stop; end always #10 osc =~osc; //產生50MHz時鐘源 endmodule
`timescale 1 ps/ 1 ps
module bianmaqi2_nishizhen_tb();
// constants
// general purpose registers
reg eachvec;
// test vector input registers
reg index;
reg rst_n;
reg osc;
reg quadA;
reg quadB;
// wires
wire A;
wire B;
wire DIR;
wire [15:0] position_out;
// assign statements (if any)
bianmaqi2 i1 (
// port map - connection between master ports and signals/registers
.A(A),
.B(B),
.rst_n(rst_n),
.DIR(DIR),
.index(index),
.osc(osc),
.position_out(position_out),
.quadA(quadA),
.quadB(quadB)
);
initial
begin
//initialize inputs
rst_n=1'b0;
osc=1'b0;
quadA =0;
quadB =1;
index =0;
#5
rst_n=1'b1;
end
initial
begin
repeat(50)begin
#20
quadA=1;
#20
quadB=0;
#20
quadA=0;
#20
quadB=1;
end
$stop;
end
always #10 osc =~osc;
//產生50MHz時鐘源
endmodule

四 總結
fpga設計模塊其實實現很簡單,主要還是Quartus和Modelsim的聯合仿真部分遇到了問題,主要還是testbench的編寫需要強化學習。
-
FPGA
+關注
關注
1643文章
21960瀏覽量
614068 -
電源線
+關注
關注
1文章
377瀏覽量
22466 -
電信號
+關注
關注
1文章
842瀏覽量
20987 -
增量式編碼器
+關注
關注
2文章
39瀏覽量
12875
原文標題:FPGA接口實現----增量式編碼器
文章出處:【微信號:gh_9d70b445f494,微信公眾號:FPGA設計論壇】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
增量式旋轉編碼器設計
基于FPGA增量式編碼器的接口設計
M30增量式編碼器介紹

STM32-增量式旋轉編碼器測量

增量式編碼器有哪些優點與缺點?
增量式編碼器







 工商網監
工商網監
評論