 香港科技大學:螺旋蘆薈如何改進視觸覺傳感器的設計
香港科技大學:螺旋蘆薈如何改進視觸覺傳感器的設計

一、摘要
觸覺接口對于增強人機交互至關重要,但由于信號耦合和低效的數據處理,實現大規模、精確的分布式力傳感仍然具有挑戰性。受多葉蘆薈螺旋結構和神經系統處理原理的啟發,本研究提出了一種基于數字通道的觸覺交互系統(phygital tactile sensing system, PhyTac)。這一創新系統能有效防止標記重疊,并能從耦合信號中準確識別多達368個區域的多點刺激。通過將物理原理融入模型訓練,作者將數據集大小縮減至僅45kilobytes,超越了通常超過1gigabyte的傳統方法。結果表明,PhyTac在0.5至25牛頓的傳感范圍內保真度高達97.7%,可廣泛應用于醫學評估、體育訓練、虛擬現實和機器人技術等領域。這項研究不僅加深了對手部中心動作的理解,還凸顯了物理與數字領域的融合,為基于人工智能的傳感器技術發展鋪平了道路。
二、背景介紹
經過數百萬年的生物進化,手已成為人類意識最直接的延伸之一。我們日常使用的許多交互設備,如手柄、鼠標、鍵盤和觸摸板,都是為了方便手的使用而設計。然而,盡管手在我們的生活中起著至關重要的作用,但我們對手產生的力知之甚少。例如,抓握時每根手指產生的力有何不同?手掌的力如何分布?這一知識空白極大地阻礙了包括精準醫療、體育訓練、機器人技術、虛擬現實操作等多個領域的發展。
圖1 基于液壓、氣壓和機械彈簧原理的握力計。
近幾個世紀,基于液壓、氣壓和機械彈簧原理的握力計是評估人手施加的力的常用方法,但它們只能提供最大力的信息,缺乏空間和時間的細節分布(圖1)。柔性觸覺仿生皮膚的發展為測量力的分布提供了新的機會,按其原理,可大致分為兩類:基于電信號的陣列式傳感(壓阻式、電容式、壓電、摩擦電等)和基于視覺的傳感技術(Gelsight、Tactip、TacLINK、Insight等)。基于電信號的傳感器在單點力測量時精度非常高,但存在大面積復雜接觸變形時引起的串擾問題,出現精度下降。基于視覺的方法可以避免電信號的串擾問題,提供更高的魯棒性,但其量程范圍通常較小(通常<10N),且同樣面臨多點大面積接觸時精度不足的問題。此外,其標定常需要大量數據集(通常>1GB)。簡而言之,現有的柔性觸覺傳感方式獲得的信息,本質上是來自多個未知負載源耦合的復雜模擬信號,這使得分布力的解碼非常復雜,特別是對于多點大面積復雜接觸的力分布,如手部的握力。 在最近的一項研究中,香港科技大學的科研團隊通過引入“數字通道”的概念,在分布力的接觸位置上生成可辯別的時序數字信號,解決了多點大面積復雜接觸問題,并提出了一種以手為中心的觸覺交互系統(PhyTac,圖2與圖3)。PhyTac由帶有標記點陣列的仿生外殼、偏振線性光源和運動捕捉攝像頭組成。當PhyTac受到手部施加的力時,其外殼會發生變形,同時攝像頭會捕捉到每個標記點的運動。隨后,利用所有標記點的位移作為輸入,物理模型增強神經網絡(FEM-NN)能夠準確建立標記點位移與手部力分布之間的映射關系。因此,系統能夠重建手部豐富的觸覺力學信息,與現有的設備相比增加了至少兩個數量級的信息量,從而在新一代的人機交互中可獲得廣泛的應用。
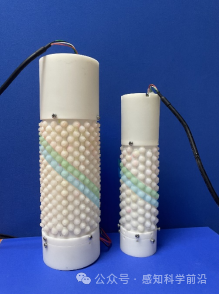
圖2 兩個尺寸的PhyTac
三、內容詳解
欲了解詳細制備過程,請閱讀原文。
“數字通道”概念的引入,可以準確識別復雜接觸的位置,從而準確解碼大面積接觸問題中的分布力。當標記點的閾值開關被激活時,它們被表示為邏輯“1”,而其他標記被表示為邏輯“0”,從而形成一個代表關鍵力空間分布的數字通道。此數字通道不僅能過濾掉來自周圍刺激的不必要干擾,還能以較少的計算資源提供具有物理意義的高質量數據(圖3 D)。通過將物理模型融入人工智能模型訓練,數據集的大小可顯著減少到僅45 KB,遠小于傳統方法(通常需要超過1 GB的數據集)。因此,即使使用極小的數據集,該設備也能從多重耦合的模擬信號中準確識別出高達368個區域的多點刺激,對于力的重建精度也高達97.7%。
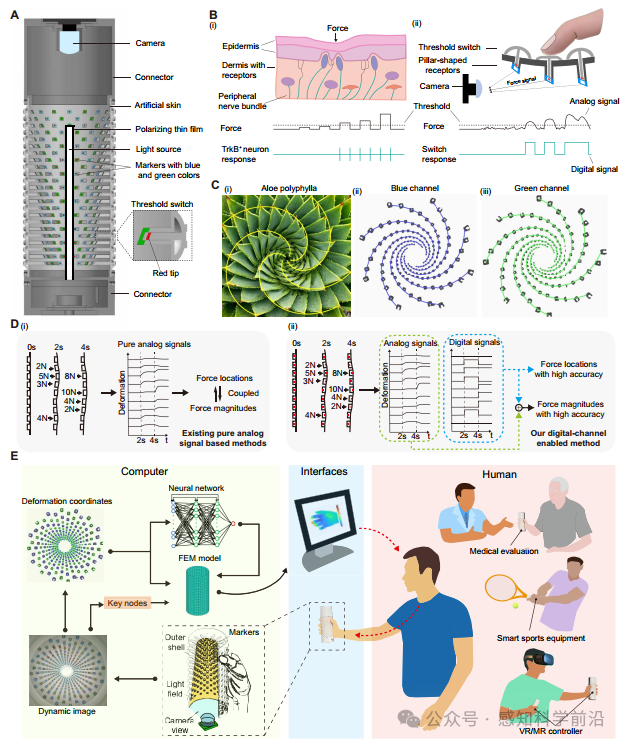
圖3 用于大規模精確分布式力傳感的數字通道賦能虛實融合觸覺系統的示意圖,該系統可處理超小數據集。A. PhyTac的整體結構和組件。B. 受TrkB+啟發的數字通道。C. 受螺旋女王蘆薈啟發的螺旋式標記點排列方法。D.引入數字通道后,分布力的位置與幅度均可精確重建。E. PhyTac的工作機制及潛在的廣泛應用。
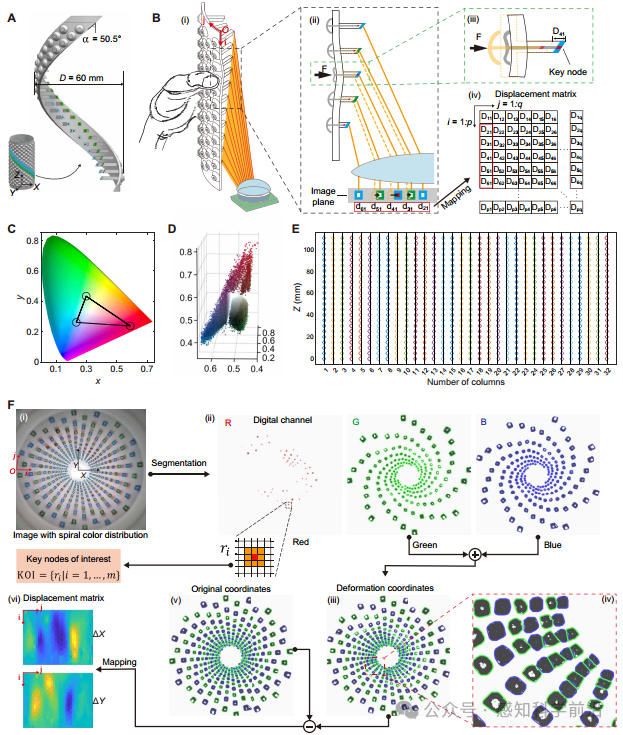
圖4. PhyTac的設計和工作原理,具有螺旋排列接收器和數字通道。
視頻 S1
“針對大規模分布式觸覺傳感技術,‘數字通道’的概念能夠為解碼力的位置提供一個新的維度,從而僅通過極小的數據集就可實現高精度和高魯棒性。”申教授解釋了這項研究的背景。
自然界中,螺旋女王蘆薈的旋轉葉序能夠避免葉子互相遮擋,從而來最大化得捕獲陽光(圖3C)。受此啟發,研究者將標記點以類似的螺旋結構排列以優化光路,使得PhyTac避免了由標記點互相遮擋引起的精度下降,并顯著提高了標記點的分布密度,這最終提高了力的傳感范圍和分辨率。 圖5展示了物理模型增強神經網絡(FEM-NN)的原理及其在小數據集上的優勢和高精度。FEM-NN的輸入是由數字通道得到的關鍵節點(key nodesof interest, KOI)和位移矩陣,輸出為增廣剛度矩陣,其僅需要一個很小的數據集(45KB)。引入的物理模型建立了一個力學框架(FEM),將標記位移和力大小聯系起來,并提供了包含PhyTac材料、幾何和力學性能的寶貴先驗知識。FEM-NN模型既采用了此力學先驗知識,并得益于神經網絡的強大擬合能力,有效地彌補了有限元模型與現實世界模型之間的物理缺失。結果表明,FEM-NN在整個量程范圍(0.5 ~ 25 N)內均保持了較高的精度,力的平均絕對誤差為0.11 N,平均相對誤差僅為2.3%,優于傳統基于純物理模型的方法和基于卷積神經網絡的方法(圖5C)。 PhyTac可直接應用于握力分布的測量,這將有益于多種疾病(中風、類風濕性關節炎等)的評估和治療。與其他潛在的解決方案(如觸覺手套)相比,此方法更加魯棒、易用和無束縛。如視頻S2所示,它可精確地識別不同握持姿勢下握力分布的動態變化。
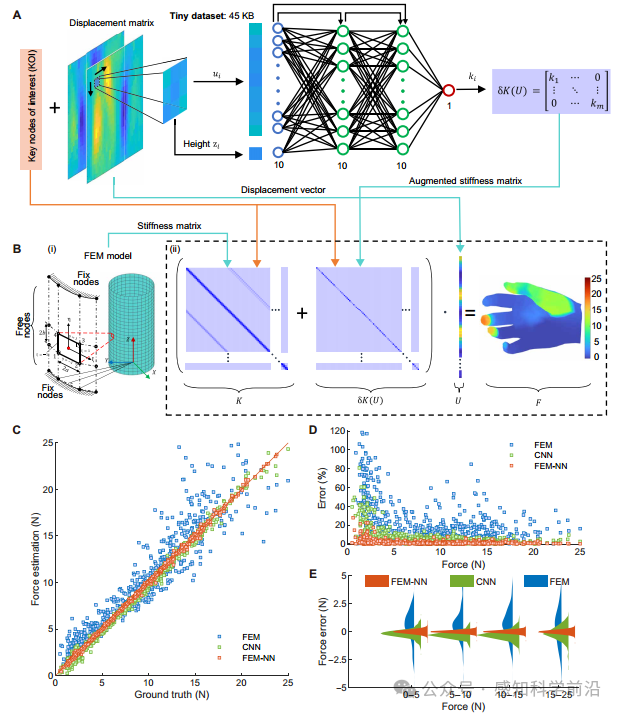
圖5 物理模型增強神經網絡(FEM-NN)的原理。
視頻 S2
研究者進一步將PhyTac安裝在網球拍上,并測量了擊打網球時手部的力量分布(如視頻S3所示)。“我們發現正手擊球時,力量主要集中在食指、中指和無名指上。相比之下,反手擊球時的力量分布則有所不同,其中拇指、無名指和小指貢獻了更多的力量。”本研究的第一作者唐一峰說道。
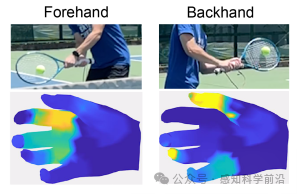
圖6 正反手擊球時力分布的對比
視頻 S3
PhyTac還能通過將現實世界中的分布力投射到虛擬世界中,實現精確的虛擬現實(VR)操控。使用者可以用拇指和食指小心翼翼地托住一個雞蛋而不將其捏碎,或者當總力量超過一定閾值時用三根手指捏碎它。同樣地,作者還展示了用握力捏碎花瓶,以及如何用不同的分布力精確操控軟球的變形(圖7和視頻S4)。“此外,得益于PhyTac在三維空間中的靈活性,它可以作為遙控操作界面,控制機器人手拿起、握住并傳遞一個薄塑料杯,而不會將其捏壞。”唐一峰補充道。詳細視頻于視頻S5中展示。
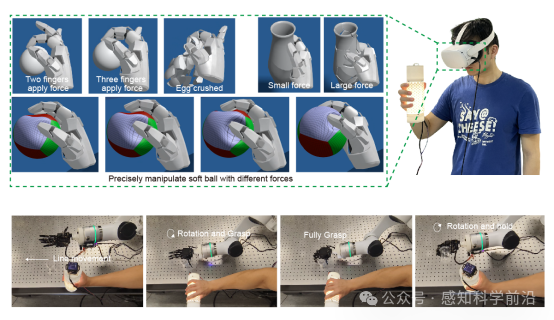
圖7 在虛擬世界中精確操控雞蛋、花瓶和軟球(上圖)。遙控機器人手抓取、握住和傳遞物體(下圖)。
視頻 S4
視頻 S5
四、全文總結
對于下一步的研究工作,團隊計劃將“數字通道”概念應用于其他幾何形狀的視觸覺傳感器上。他們認為,當克服干擾問題時,其他類型的分布式軟觸覺傳感器,如電阻式和電容式傳感器,也將從這項研究中獲益。
“我們的目標是為物理世界、虛擬世界和機器人之間建立智能交互的橋梁。PhyTac是實現這一目標的重要一步。它加深了我們對手部動作的理解,我們期望它能成為一種以手為中心的媒介,在醫學評估、體育訓練、機器人和虛擬現實(VR)等多個領域實現應用。”該項目的負責人申亞京教授說道。
五、文獻信息
Yifeng Tang et al. ,Digital channel–enabled distributed force decoding via small datasets for hand-centric interactions.Sci. Adv.11,eadt2641(2025).DOI:10.1126/sciadv.adt2641
審核編輯 黃宇
-
觸覺傳感器
+關注
關注
4文章
105瀏覽量
9711
發布評論請先 登錄
比亞迪與香港科技大學成立具身智能實驗室
索尼3LCD激光商用投影機交付華中科技大學
大普技術亮相香港科技大學(廣州)第三屆INNOTECH創科嘉年華
電子科技大學OpenHarmony技術俱樂部正式揭牌成立

香港科技大學商學院一行走進大普技術
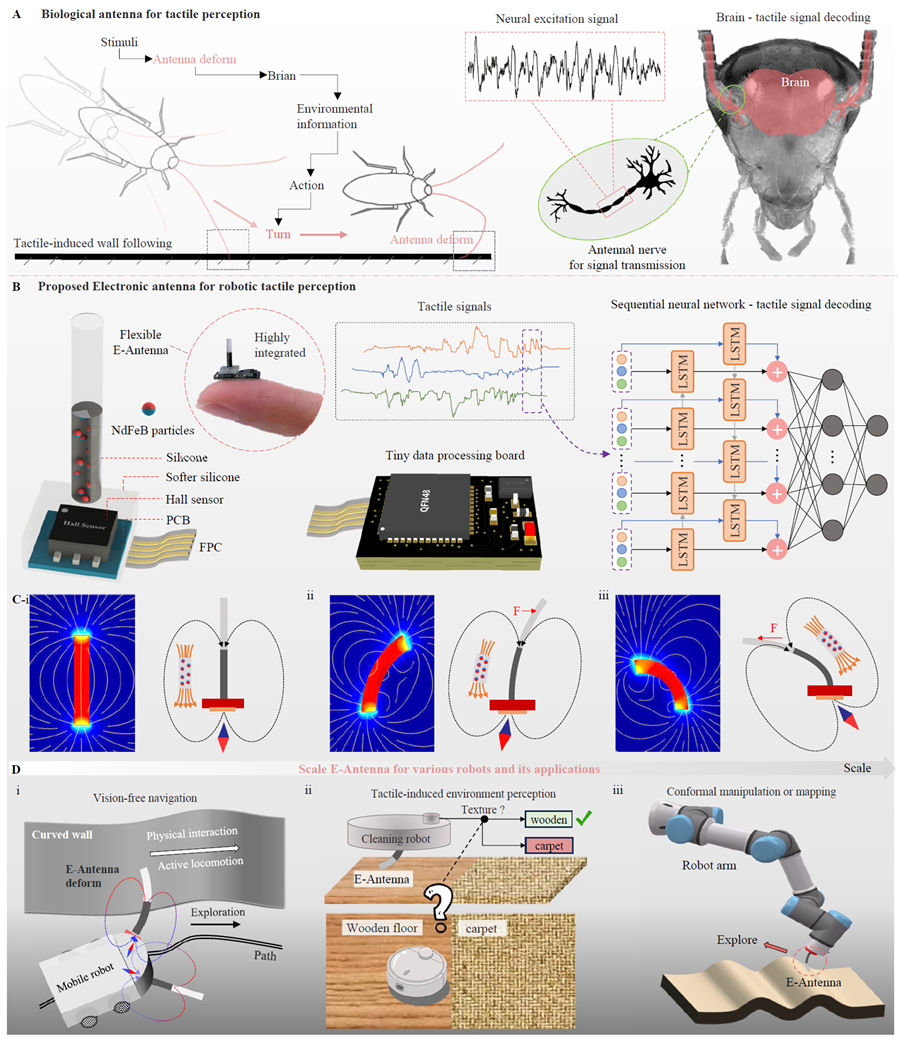
研制仿生電子觸角傳感器,突破無視覺環境感知瓶頸
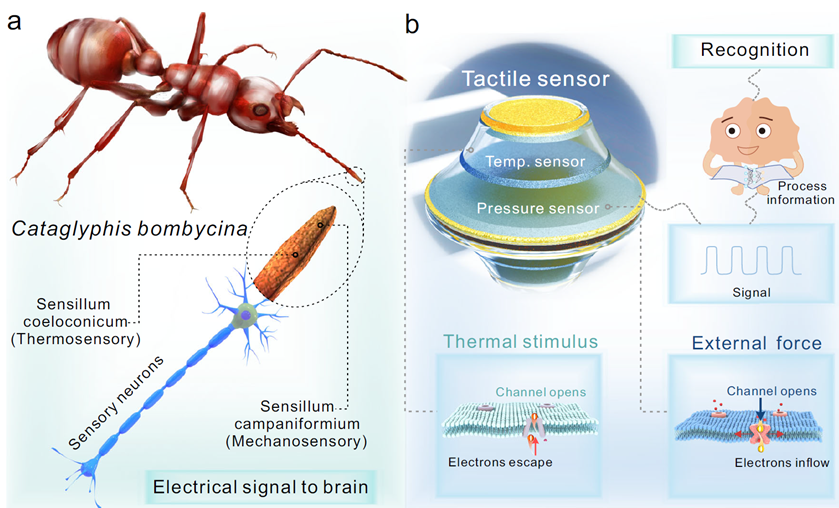
仿生觸覺傳感器:觸碰未來的科技奇跡
廣西大學:用于高溫應用中的壓力和溫度傳感的摩擦電觸覺傳感器
香港科技大學(HKUST):用小數據集實現大尺度觸覺傳感,有望應用于以手為中心的健康、運動、機器人和虛

香港科技大學陳敬課題組揭示GaN與SiC材料的最新研究進展

大學計劃 | 同星智能贊助電子科技大學 Fury 電動方程式賽車隊

南方科技大學OpenHarmony技術俱樂部正式揭牌成立

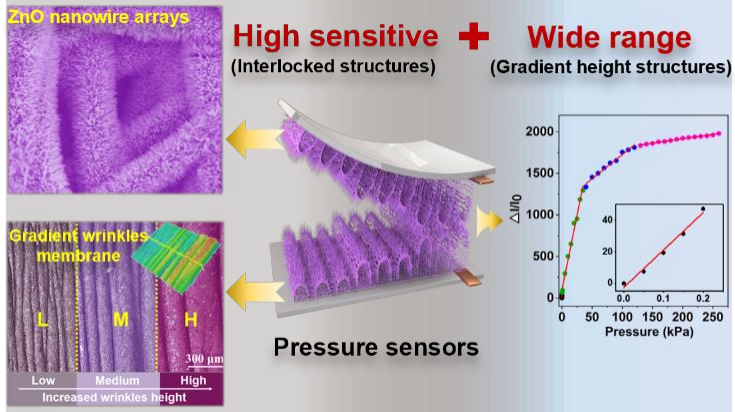
陜西科技大學:研究電紡聚氨酯基壓阻傳感器—構筑互鎖和梯度褶皺,實現靈敏和寬閾監測
NVIDIA CEO黃仁勛對話香港科技大學畢業生
哈爾濱工業大學/南方科技大學:聚焦離子束制備高分辨率電化學-電致發光耦合雙極納米電極陣列傳感器






 工商網監
工商網監
評論