 晶振在人形機器人系統中的關鍵應用與未來趨勢
晶振在人形機器人系統中的關鍵應用與未來趨勢
在2025年央視春晚的舞臺上,《秧BOT》節目中16個身著花襖、手持花絹的機器人“福兮”帶來的扭秧歌表演,令觀眾眼前一亮,也使得人形機器人再次成為焦點。充分展現了中國AI和智能制造的前沿實力,為觀眾帶來了新奇的視覺體驗,也讓科技更加貼近大眾生活。

隨著人工智能與機器人技術的快速發展,人形機器人在工業制造、醫療康復、教育娛樂等領域發揮著越來越重要的作用。而在機器人控制系統中,**晶振**作為核心時鐘源,確保了各個模塊的高精度同步與穩定運行。
1、人形機器人對晶振的需求
人形機器人涉及多個高精度計算和控制模塊,如運動控制、傳感器數據處理、無線通信、人工智能計算等,這些系統都需要穩定的時鐘信號。因此,晶振在機器人系統中主要用于:
?主控芯片時鐘源:提供穩定時鐘,確保 CPU、MCU運行正常。
?運動控制系統:驅動機器人關節協調運動,確保步態平穩。
?無線通信模塊:Wi-Fi、Bluetooth、5G等通信系統需高頻時鐘支持。
?傳感器數據處理:加速度計、陀螺儀、激光雷達等傳感器依賴高精度時鐘同步。
?語音識別與 AI 計算:機器人的語音處理、圖像識別等 AI 任務需要精準時序信號。
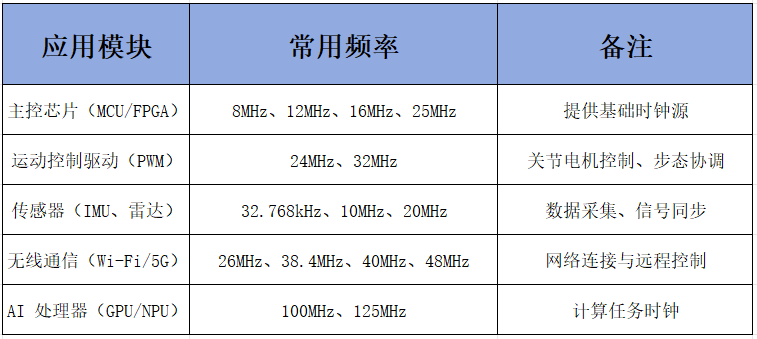
2. 人形機器人常用的晶振頻率
人形機器人系統復雜,不同模塊需要不同頻率的晶振,常見應用如下:
3. 關鍵應用場景分析
(1)主控芯片(MCU/FPGA)時鐘
機器人主控單元通常采用ARM MCU 或FPGA,需要高精度晶振(如 12MHz、25MHz)作為時鐘源,確保數據計算、控制命令執行的準確性。例如,STM32、ESP32、Xilinx FPGA等都依賴晶振來維持系統穩定。
(2)運動控制系統
人形機器人需要精準控制關節運動,確保步態平衡。步態控制算法、PWM(脈寬調制)信號生成都需要高穩定性時鐘信號(常見 24MHz、32MHz)。晶振的精度直接影響運動平滑性,防止機器人出現步態不穩、關節抖動等問題。
(3)傳感器數據采集
機器人的陀螺儀(IMU)、激光雷達(LiDAR)、攝像頭等傳感器需要高精度時間同步。例如,慣性測量單元(IMU)通常使用32.768kHz 晶振,保證傳感器采樣速率精準,確保機器人在復雜環境中的平衡與導航。
(4)無線通信
現代人形機器人支持Wi-Fi、5G、藍牙等無線通信,遠程控制機器人,甚至通過 AI 云端計算增強能力。26MHz、40MHz晶振是無線模塊的關鍵時鐘,影響通信穩定性與傳輸速度。
(5)AI計算
高端人形機器人搭載GPU 或NPU(神經網絡處理單元),運行 AI 任務,如語音交互、環境感知、圖像識別等。這類計算芯片通常采用100MHz、125MHz以上高頻晶振,提供高性能計算能力。
4. 未來發展趨勢
?超小型晶振:人形機器人對小型化、輕量化的需求日益提升,1.6×1.2mm、1.0×0.8mm封裝的超小型晶振將更受歡迎。
?高穩定 TCXO(溫補晶振):機器人在不同環境(如高溫、低溫)下運行,溫補晶振(TCXO)確保時鐘穩定性,提高定位精度。
?低功耗晶振:智能機器人需要長續航,低功耗晶振(如 32.768kHz)幫助優化電池能耗。
?差分晶振(LVDS/LP-HCSL):機器人 AI 計算模塊對高速信號傳輸要求提高,差分晶振成為趨勢,如100MHz、125MHz差分晶振。
5. 結論
晶振作為人形機器人系統的核心時鐘元件,在主控計算、運動控制、傳感器同步、無線通信、AI 計算等方面發揮至關重要的作用。隨著機器人技術的發展,未來將需要更高精度、更低功耗、更穩定的晶振產品,助力機器人向更智能、更穩定的方向進化。杭晶可以為客戶提供相應產品及技術支持。
-
機器人
+關注
關注
213文章
29489瀏覽量
211555 -
晶振
+關注
關注
34文章
3199瀏覽量
69561 -
人形機器人
+關注
關注
7文章
687瀏覽量
17469
發布評論請先 登錄
人形之外,AI機器人的多元未來

石英晶振在人形機器人中的應用
實現“AI+”關鍵突破,剖析人形機器人里的關鍵技術和未來趨勢

人形機器人設計中,哪些關鍵部位需要功率器件?典型電壓/電流參數如何設計?
伺服電動缸在人形機器人中的應用
《具身智能機器人系統》第1-6章閱讀心得之具身智能機器人系統背景知識與基礎模塊
王耀南院士:AI大模型賦能人形機器人及未來趨勢

人形機器人感知變化的未來






 工商網監
工商網監
評論