") 應(yīng)對海量數(shù)據(jù)挑戰(zhàn),如何基于Euro NCAP標(biāo)準(zhǔn)開展高效智駕測試與評估?
應(yīng)對海量數(shù)據(jù)挑戰(zhàn),如何基于Euro NCAP標(biāo)準(zhǔn)開展高效智駕測試與評估?
一、前言
隨著自動駕駛技術(shù)的快速發(fā)展,龐大的測試數(shù)據(jù)和復(fù)雜的場景需求為性能與安全評估帶來了巨大挑戰(zhàn)。如何高效管理海量數(shù)據(jù)、挖掘關(guān)鍵場景,并滿足以Euro NCAP(European New Car Assessment Programme,歐洲新車安全評鑒協(xié)會)為代表的嚴(yán)格評估標(biāo)準(zhǔn),已成為行業(yè)亟待解決的核心問題。
這不僅關(guān)乎技術(shù)研發(fā)的效率與精度,更是智能駕駛車輛進(jìn)入市場、提升競爭力的關(guān)鍵前提。本文我們將圍繞如何應(yīng)對海量數(shù)據(jù)所帶來的挑戰(zhàn)進(jìn)行探討,分享提高場景測試與性能安全評估的見解。
二、場景測試與性能評估的挑戰(zhàn)
在自動駕駛技術(shù)的研發(fā)與測試過程中,“場景”是一個核心概念,也是驗證自動駕駛系統(tǒng)性能和安全性的關(guān)鍵手段之一。無論是行業(yè)專家還是普通關(guān)注者,談及自動駕駛測試時,都會提到“場景”以及“基于場景的測試”。

圖 1自動駕駛場景概念圖
場景通常由靜態(tài)要素(道路、交通標(biāo)志、建筑物等)、動態(tài)目標(biāo)(車輛、行人等)、環(huán)境條件(天氣、光照等)、行為模式(變道、急剎車等)組成,旨在描述車輛可能面臨的各種復(fù)雜情況。由于內(nèi)容極為豐富,國際標(biāo)準(zhǔn)ISO 34501通過四層抽象分級模型對其進(jìn)行分類,即功能場景、抽象場景、邏輯場景和具體場景,后兩者便是當(dāng)下關(guān)注的重點。

圖 2四層抽象分級模型與場景測試挑戰(zhàn)
對于測試而言,除了在各個場景下的性能表現(xiàn),通常還得滿足一些法規(guī)或者評估標(biāo)準(zhǔn)。例如,對于車輛的安全性而言,最廣為人知的便是Euro NCAP的評級。
Euro NCAP的評級結(jié)果不僅會為消費者選購車輛提供重要參考,也是諸多汽車制造商和技術(shù)開發(fā)者研發(fā)過程中明確的安全目標(biāo)。無論是傳統(tǒng)燃油車還是智能駕駛車輛,獲得Euro NCAP的高評分都是進(jìn)入歐洲市場、提升市場競爭力的重要前提。
然而,隨著自動駕駛技術(shù)的高速發(fā)展,測試需求與標(biāo)準(zhǔn)的日益復(fù)雜化,自動駕駛研發(fā)與測試中所產(chǎn)生的數(shù)據(jù)日益增加,對邏輯場景與具體場景的需求也逐步攀升,這也就為場景測試帶來了諸多挑戰(zhàn):
a)海量的測試數(shù)據(jù)與場景
自動駕駛測試需要處理極其龐大的場景庫和測試數(shù)據(jù),如何高效地管理和利用這些數(shù)據(jù)成為一大難題。
b) 指標(biāo)分析與數(shù)據(jù)管理的難度
隨著測試指標(biāo)的逐漸增加,如何對測試結(jié)果進(jìn)行全面、準(zhǔn)確的分析,以及如何高效地管理測試數(shù)據(jù),都是亟待解決的問題。
c)性能與安全評估方法的效率
自動駕駛系統(tǒng)的性能和安全性評估需要高效快捷的方法,以應(yīng)對大規(guī)模測試的需求。
d)真實場景向仿真場景的轉(zhuǎn)換
為了實現(xiàn)重復(fù)測試,需要將真實場景高效地轉(zhuǎn)化為仿真場景,即LogSim到WorldSim的轉(zhuǎn)化。
e)高昂的測試成本
應(yīng)對上述種種挑戰(zhàn)需要投入大量的資源,包括人力、時間和資金。
面對這些挑戰(zhàn),我們嘗試在云端搭建一個模塊化的數(shù)據(jù)管理與場景挖掘平臺,并集成Euro NCAP 道路穩(wěn)健性協(xié)議(包括速度輔助系統(tǒng)、車道支持系統(tǒng)和輔助駕駛),進(jìn)而實現(xiàn)了高效場景測試與性能安全評估。
圖 3數(shù)據(jù)管理與場景挖掘概覽
三、數(shù)據(jù)管理與高效分析方法
在自動駕駛測試中,海量的駕駛數(shù)據(jù)與復(fù)雜的場景構(gòu)建是基礎(chǔ),同時也是挑戰(zhàn)。如何高效地管理這些數(shù)據(jù),并從中提取出有意義的場景,成為驗證自動駕駛系統(tǒng)性能與安全性的關(guān)鍵環(huán)節(jié)。3、4章節(jié)將從數(shù)據(jù)管理、聚合分析、場景提取與評估技術(shù)以及場景導(dǎo)出四個方面,詳細(xì)探討如何高效處理海量數(shù)據(jù)并挖掘關(guān)鍵場景。
1、數(shù)據(jù)管理技術(shù):高效處理海量信息
對于場景測試或者以Euro NCAP為代表的性能評估而言,通常會產(chǎn)生大量的駕駛數(shù)據(jù),例如Euro NCAP 2026年新版安全駕駛汽車輔助協(xié)議(Safe Driving Vehicle Assistance)就明確提出部分功能的評估需要滿足至少2000公里的測試。
面對海量的駕駛記錄與復(fù)雜的場景需求,數(shù)據(jù)管理需要兼顧高效性、靈活性與協(xié)作性。對此,我們嘗試基于云搭建模塊化的數(shù)據(jù)管理平臺,旨在實現(xiàn)駕駛數(shù)據(jù)的高效處理、評估與檢查。
a)駕駛數(shù)據(jù)摘要與高級查詢
通過鼠標(biāo)單擊查看駕駛記錄的摘要信息,獲取清晰的駕駛數(shù)據(jù)概覽,并采用事件(Event)、操作設(shè)計域(ODD)或場景(Scenario)三類標(biāo)簽,以組合的方式快速查詢需要的駕駛記錄。
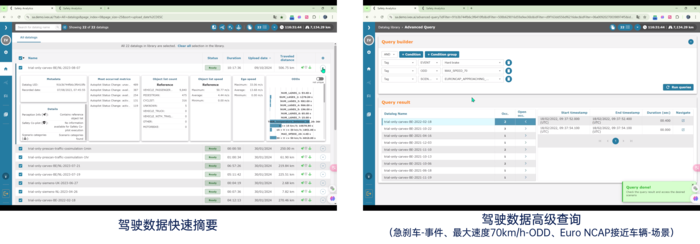
圖 4快速摘要與高級查詢
b)可視化界面與團(tuán)隊協(xié)作
基于相機(jī)視角、感知還原、GPS軌跡、車輛速度等多維度創(chuàng)建可視化界面,對場景進(jìn)行深入分析。同時,采取URL分享的方式,實現(xiàn)團(tuán)隊成員之間的高效協(xié)作與共同分析數(shù)據(jù)。
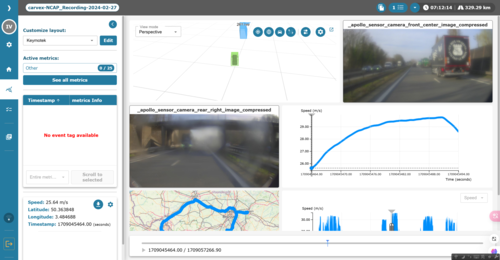
圖 5自定義可視化界面
2、聚合分析技術(shù):從海量數(shù)據(jù)中洞察規(guī)律
除了單一場景的快速查詢與分析,針對海量駕駛數(shù)據(jù)的整體規(guī)律分析同樣至關(guān)重要。為此,我們使用聚合分析的方法,通過多級指標(biāo)(Metrics)對駕駛數(shù)據(jù)進(jìn)行整理、分類和聚類分析,加速發(fā)現(xiàn)數(shù)據(jù)中的潛在規(guī)律。
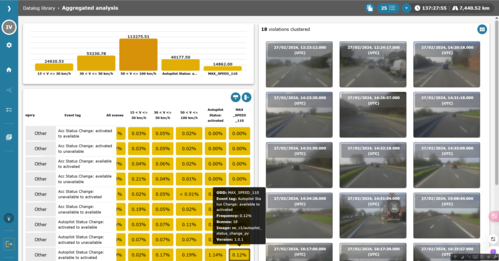
圖 6聚合分析
a)多級指標(biāo)的靈活分析
通過采取感知、行為、舒適度等多級指標(biāo)進(jìn)行分析。例如,當(dāng)想要了解“自動駕駛系統(tǒng)開啟狀態(tài)”、“特定速度區(qū)間”、“白天”的違規(guī)率,就可以設(shè)定對應(yīng)指標(biāo),構(gòu)建指標(biāo)矩陣與直方圖,隨著指標(biāo)的增加,矩陣與直方圖會產(chǎn)生動態(tài)變化,得以快速掌握概況以及各個指標(biāo)下統(tǒng)計出的違規(guī)率。
b)一鍵聚類與場景跳轉(zhuǎn)
聚合分析技術(shù)能夠基于指標(biāo)矩陣對駕駛記錄進(jìn)行自動聚類,并支持關(guān)鍵場景的快速跳轉(zhuǎn)。單擊矩陣中的特定數(shù)值即可直接查看對應(yīng)的場景列表,并快速跳轉(zhuǎn)到可視化界面,查看場景細(xì)節(jié),進(jìn)行深入分析。
四、場景挖掘、評估與ASAM OpenX場景導(dǎo)出
為了在大量駕駛數(shù)據(jù)的挑戰(zhàn)下提高場景測試與評估的效率,我們基于感知算法從原始駕駛數(shù)據(jù)中提取出場景,將原有的大量里程與時間濃縮為了一系列特定場景,并結(jié)合了自定義標(biāo)準(zhǔn)與Euro NCAP標(biāo)準(zhǔn)建立了多種預(yù)設(shè)評估方式,保障效率與準(zhǔn)確性的同時盡可能節(jié)省時間與精力。
1、場景提取與評估技術(shù):挖掘關(guān)鍵場景與性能見解
如何從大量的駕駛數(shù)中提取有意義的場景并進(jìn)行性能評估,是自動駕駛測試的重要環(huán)節(jié)。我們通過對激光雷達(dá)、相機(jī)、GPS等原始傳感器輸入的數(shù)據(jù)進(jìn)行感知,從真實或仿真數(shù)據(jù)中高效挖掘場景,提供多維度的性能與安全見解。
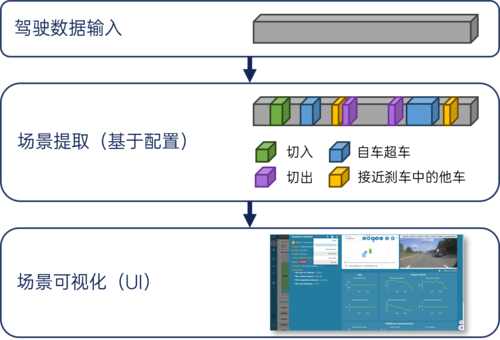
圖 7場景挖掘流程示意圖
a)自動清除空駛里程
駕駛數(shù)據(jù)中通常存在大量沒有特殊事件發(fā)生的空駛里程,占據(jù)了大量存儲空間但對測試無意義。我們通過設(shè)定場景提取的條件,例如自車速度、障礙物速度、自車與障礙物縱向距離等,自動剔除這些“空駛里程”,準(zhǔn)確提取出常用場景(如SOTIF、ISO 26262、EuroNCAP等標(biāo)準(zhǔn)規(guī)定的場景),進(jìn)而節(jié)省時間成本。
b)性能與安全評估
提取的場景可以基于預(yù)設(shè)的Euro NCAP或自定義標(biāo)準(zhǔn)進(jìn)行性能評估。例如,設(shè)定最大速度或碰撞時間(TTC)等指標(biāo),就可以快速篩選出不符合預(yù)期的場景,并通過可視化界面查看詳細(xì)信息。對于失敗的場景,一鍵點擊跳轉(zhuǎn)到數(shù)據(jù)管理與分析平臺,查看感知還原的場景、相機(jī)視頻、速度等細(xì)節(jié)進(jìn)行深度分析。
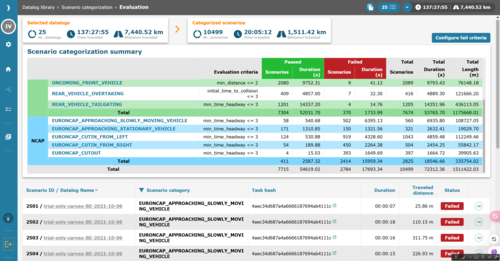
圖 8自定義標(biāo)準(zhǔn)與Euro NCAP標(biāo)準(zhǔn)的場景評估
2、場景導(dǎo)出器:從LogSim到WorldSim的轉(zhuǎn)換
為了推動仿真測試的便捷化,我們基于相機(jī)圖像、激光雷達(dá)點云、GPS定位信息等原始駕駛數(shù)據(jù),通過內(nèi)部的感知算法將其轉(zhuǎn)化為仿真場景,完成了從LogSim到WorldSim的高效轉(zhuǎn)換。轉(zhuǎn)化后的仿真場景能夠被導(dǎo)出為仿真所需的ASAM標(biāo)準(zhǔn)文件格式(OpenSCENARIO與OpenDrive),實現(xiàn)數(shù)字孿生。

圖 9場景導(dǎo)出器:一鍵導(dǎo)出與自定義導(dǎo)出
數(shù)據(jù)輸入支持多種數(shù)據(jù)格式(如RosBag、LCM、ADTF等),并可以根據(jù)需求自定義導(dǎo)出場景的時間范圍(最長30秒),導(dǎo)出的場景文件可以直接導(dǎo)入支持標(biāo)準(zhǔn)OpenX格式文件的仿真器(如aiSim5),根據(jù)需要進(jìn)行修改后運行仿真測試。

圖 10聯(lián)動aiSim仿真器的場景仿真示例
五、集成式Euro NCAP道路評估器
為了更快速且可靠地對駕駛系統(tǒng)性能安全進(jìn)行評估,并幫助在未來Euro NCAP的安全輔助評估中拿到高評分,數(shù)據(jù)管理與分析平臺(DAP)內(nèi)將集成Euro NCAP道路評估器(On-road Evaluator),獲得基于海量駕駛數(shù)據(jù)的深刻見解。
1、基于Euro NCAP協(xié)議的三大評估板塊
通過在數(shù)據(jù)管理與分析平臺中集成Euro NCAP道路評估器,可以支持對道路ADAS性能快速提供評估結(jié)果,減少評估時間和成本,同時確保嚴(yán)格遵守既定的標(biāo)準(zhǔn),幫助在評定中獲得更高的星級。
Euro NCAP道路評估器主要針對Euro NCAP 2026協(xié)議歸納出三大板塊進(jìn)行評估:
a) SAS(Speed Assist System,速度輔助系統(tǒng))
b) LSS(Lane Support System,車道支持系統(tǒng))
c) AD(Assisted Driving,輔助駕駛)
這些板塊進(jìn)一步被細(xì)分為多個功能模塊,例如AEB(自動緊急制動)、LKA(車道保持輔助)、SLIF(速度限制信息功能)等,覆蓋了智能駕駛車輛在不同場景下的關(guān)鍵安全功能。
2、Euro NCAP道路評估器工作流及特點
通過道路評估器可以快速測試ADAS功能,例如SLIF與LKA,并快速評估Euro NCAP KPI,自動生成反饋報告,使得直擊問題根源與優(yōu)化系統(tǒng)性能變?yōu)榭赡埽M(jìn)而在最終評定中得以獲得更高的星級。
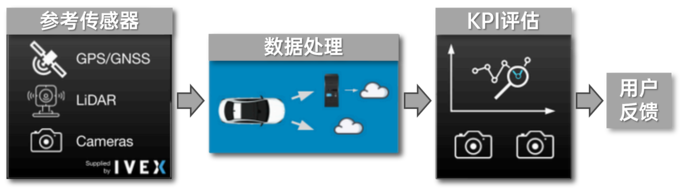
圖 12Euro NCAP道路評估器工作流程
道路評估器的工作流分為以下幾個步驟:
1.基于參考傳感器硬件設(shè)備采集駕駛數(shù)據(jù)
2.使用 Euro NCAP On-Road Evaluator 進(jìn)行數(shù)據(jù)處理
3.基于 ODD 的 Euro NCAP 道路 KPI 評估
4.快速得到 KPI 計算和評分的反饋
通過上述工作流,Euro NCAP道路評估器便能夠做到在完全遵循Euro NCAP中關(guān)于SAS、LSS、AD的要求的前提下,基于操作設(shè)計域(ODD)對車輛進(jìn)行快速評估,節(jié)省大量時間和資源。
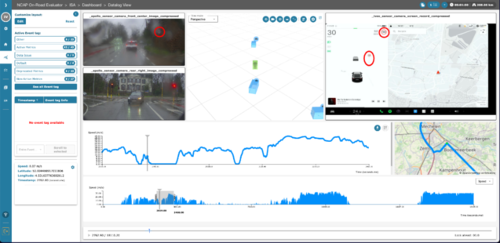
圖 13速度限制信息功能示意圖(SLIF)
結(jié)合DAP的基礎(chǔ)功能模塊,道路評估器可以實現(xiàn)數(shù)據(jù)可視化、相機(jī)視圖、數(shù)據(jù)管理的定制化功能,如圖13所示,便于深入研究特定的失敗事件或異常場景。在此基礎(chǔ)上,通過精確的評估算法,道路評估器能夠避免代價高昂的返工,最大限度上節(jié)省該方面的成本。
六、總結(jié)
在自動駕駛技術(shù)的研發(fā)與測試中,場景測試是驗證系統(tǒng)性能與安全性的核心手段。康謀IVEX方案通過高效的數(shù)據(jù)管理、場景挖掘與性能評估技術(shù),解決了海量數(shù)據(jù)處理、復(fù)雜場景構(gòu)建、高昂測試成本等難題,并深度耦合Euro NCAP相關(guān)協(xié)議,推動基于真實世界場景的安全評估標(biāo)準(zhǔn)化。
通過數(shù)據(jù)驅(qū)動的方式,不僅提升了系統(tǒng)的測試效率,還能夠助力智能駕駛車輛在Euro NCAP評定中獲得更高評分,加速自動駕駛技術(shù)的研發(fā)與落地,為行業(yè)發(fā)展提供重要支撐。
-
測試
+關(guān)注
關(guān)注
8文章
5624瀏覽量
128285 -
仿真
+關(guān)注
關(guān)注
51文章
4234瀏覽量
135293 -
數(shù)據(jù)處理
+關(guān)注
關(guān)注
0文章
626瀏覽量
29026 -
自動駕駛
+關(guān)注
關(guān)注
788文章
14193瀏覽量
169484 -
汽車
+關(guān)注
關(guān)注
14文章
3794瀏覽量
39208
發(fā)布評論請先 登錄
虹軟助力嵐圖知音榮獲Euro NCAP五星安全評級
淺談高速脈沖測試的挑戰(zhàn)與應(yīng)對策略


比亞迪海獅07EV榮獲EURO NCAP和A-NCAP五星安全認(rèn)證
動力電池測試中的直流負(fù)載挑戰(zhàn)與應(yīng)對策略
康謀分享 | 突破傳統(tǒng)匿名化:先進(jìn)技術(shù)解鎖數(shù)據(jù)價值新維度

DEKRA德凱獲得Euro NCAP主動安全測試認(rèn)可
康謀分享 | 如何應(yīng)對ADAS/AD海量數(shù)據(jù)處理挑戰(zhàn)?

用于SLAM中點云地圖綜合評估的開源框架
上汽大通eTerron 9斬獲歐洲Euro NCAP五星安全認(rèn)證
端到端已來,智駕仿真測試該怎么做?

多通道負(fù)載測試和性能評估?
盛顯科技:拼接處理器如何實現(xiàn)高效數(shù)據(jù)拼接操作?

海外HTTP安全挑戰(zhàn)與應(yīng)對策略
新思科技TSO.ai助力解決芯片測試成本和時間挑戰(zhàn)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論