") SPI通信總線的原理及工作過(guò)程簡(jiǎn)單分析
SPI通信總線的原理及工作過(guò)程簡(jiǎn)單分析

概況:
SPI, 串行外圍設(shè)備接口。高速的,全雙工的,同步通信總線。有四個(gè)引腳:SDI(數(shù)據(jù)輸入),SDO(數(shù)據(jù)輸出),SCLK(時(shí)鐘),CS(片選)。
應(yīng)用:
常作為單片機(jī)外設(shè)芯片串行擴(kuò)展接口,主要應(yīng)用于EEPROM,FLASH,實(shí)時(shí)時(shí)鐘,AD轉(zhuǎn)換器,數(shù)字信號(hào)處理器和數(shù)字信號(hào)解碼器之間。
通信原理:
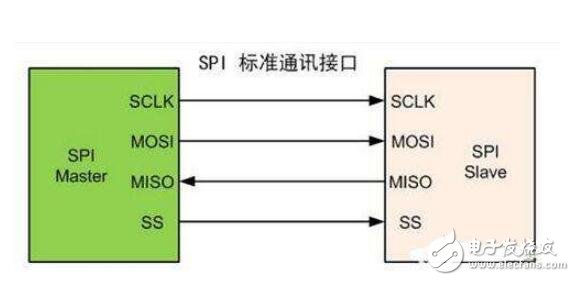
以主從方式工作
MOSI(SDO):主器件數(shù)據(jù)輸出,從器件數(shù)據(jù)輸入。
MISO(SDI):主器件數(shù)據(jù)輸入,從器件數(shù)據(jù)輸出。
SCLK :時(shí)鐘信號(hào),由主器件產(chǎn)生。
SPI串行傳輸,數(shù)據(jù)一位一位從MSB或LSB開始傳輸,產(chǎn)生相應(yīng)的脈沖沿時(shí),MOSI,MISO才進(jìn)行數(shù)據(jù)傳輸。
CS:從器件使能信號(hào),由主器件控制。
CS控制芯片是否被選中,只有片選信號(hào)為實(shí)現(xiàn)約定的使能信號(hào)時(shí)(高電位或地電位),對(duì)此芯片的操作才有效,這也就允許同一總線上連接多個(gè)SPI設(shè)備。
工作過(guò)程:
SPI可以用全雙工通信方式同時(shí)發(fā)送和接收8(16)位數(shù)據(jù),過(guò)程如下:
主機(jī)啟動(dòng)發(fā)送過(guò)程,送出時(shí)鐘脈沖信號(hào)——>主移位寄存器的數(shù)據(jù)通過(guò)SDO移入到從移位寄存器,同時(shí)從移位寄存器中的數(shù)據(jù)通過(guò)SDI移人到主移位寄存器中——>8(16)個(gè)時(shí)鐘脈沖過(guò)后,時(shí)鐘停頓,主移位寄存器中的8(16)位數(shù)據(jù)全部移人到從移位寄存器中,隨即又被自動(dòng)裝入從接收緩沖器中,從機(jī)接收緩沖器滿標(biāo)志位(BF)和中斷標(biāo)志位(SSPIF)置“1”。同理,從移位寄存器中的8位數(shù)據(jù)全部移入到主寄存器中,隨即又被自動(dòng)裝入到主接收緩沖器中.主接收緩沖器滿標(biāo)志位(BF)和中斷標(biāo)志位(SSPIF)置“1”——>主CPU檢測(cè)到主接收緩沖器的滿標(biāo)志位或者中斷標(biāo)志位置1后,就可以讀取接收緩沖器中的數(shù)據(jù)。同樣,從CPU檢測(cè)到從接收緩沖器滿標(biāo)志位或中斷標(biāo)志位置1后,就可以讀取接收緩沖器中的數(shù)據(jù),這樣就完成了一次相互通信過(guò)程。
SPI總線接口及時(shí)序
SPI輸出串行同步時(shí)鐘極性和相位可以根據(jù)外設(shè)工作要求進(jìn)行配置。
若CPOL = 0,串行同步時(shí)鐘的空閑狀態(tài)為低電平;
若CPOL = 1,串行同步時(shí)鐘的空閑狀態(tài)為高電平;
時(shí)序如下
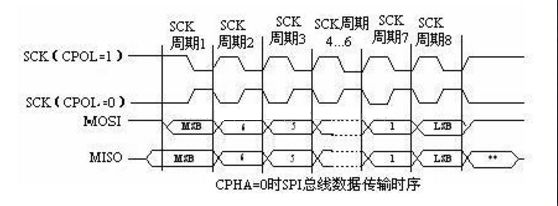
若CPHA = 0,在串行同步時(shí)鐘的第一個(gè)跳變沿(上升或下降)數(shù)據(jù)將被采樣;
若CPHA = 1,在串行同步時(shí)鐘的第二個(gè)跳變沿(上升或下降)數(shù)據(jù)將被采樣;
時(shí)序如下:
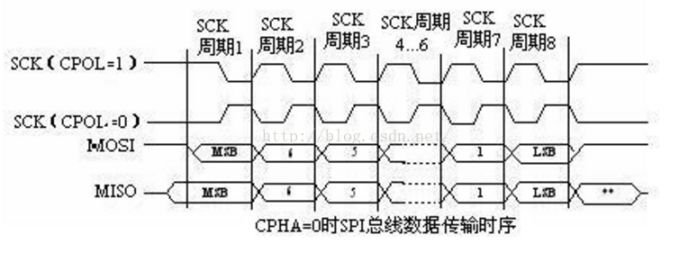
SPI主模塊與與之通信的外設(shè)空閑狀態(tài)的極性和時(shí)鐘相位應(yīng)該一致。
-
SPI
+關(guān)注
關(guān)注
17文章
1804瀏覽量
95895
原文標(biāo)題:SPI通信總線的原理及工作過(guò)程簡(jiǎn)單分析
文章出處:【微信號(hào):gh_c472c2199c88,微信公眾號(hào):嵌入式微處理器】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
看完這篇,SPI其實(shí)也很簡(jiǎn)單嘛(可下載)
如何使用ZPS-CANFD觀察CAN數(shù)據(jù)鏈路層的工作過(guò)程

不管是LTC6912還是AFE5801通過(guò)SPI總線對(duì)reg進(jìn)行寫的時(shí)候,在寫的過(guò)程中,AFE5801還在工作狀態(tài)嗎?
SPI通信總線概述和Verilog實(shí)現(xiàn)

SAR ADC的工作過(guò)程和關(guān)鍵指標(biāo)
恒流三極管的工作過(guò)程和電路結(jié)構(gòu)
鋼材在線測(cè)徑儀的工作模式及工作過(guò)程
極化整流器的作用和工作過(guò)程
可調(diào)電源電路穩(wěn)壓工作過(guò)程是什么
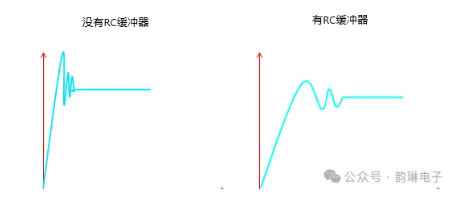
RC緩沖器的工作過(guò)程介紹





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論