") 其利天下技術·電機控制SVPWM七段式算法·無刷電機驅動方案
其利天下技術·電機控制SVPWM七段式算法·無刷電機驅動方案

一般控制三相電機的控制技術采用SVPWM(Space Vector Pulse Width Modulation)算法。它對于電機控制可以提供更高的效率和更低的噪聲。SVPWM控制算法可以分為七段式和五段式兩種。今天我們先介紹下七段式算法如何應用到電驅系統(tǒng)進行電磁兼容性仿真。七段式是一種更復雜的SVPWM控制技術,可以將三相電機的輸出電壓分解為七個矢量,分別為正向最大矢量,正向中等矢量,正向最小矢量,負向最小矢量,負向中等矢量,負向最大矢量和零矢量。這七個矢量可以通過控制脈沖寬度來控制三相電機的輸出電壓。
SVPWM基本原理
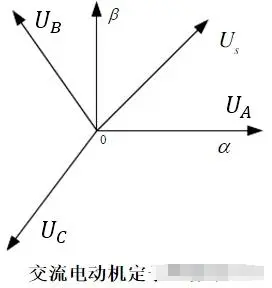
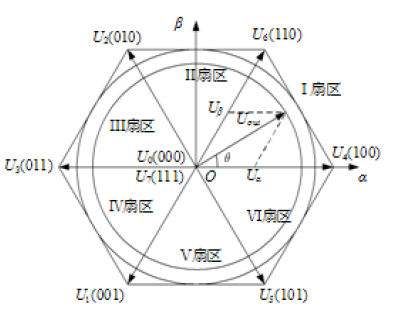
要得到一個恒定大小的旋轉磁場,可以先來得到一個恒定大小的旋轉電壓矢量。如下圖:
從上圖可知,我們可以通過互差120度,大小隨著時間按正弦規(guī)律變化的3個分矢量來合成一個大小不變旋轉的總矢量。于是問題又變成了:如何得到大小隨著時間按正弦規(guī)律變化的3個分矢量呢?我們先回到電機上,其實這3個分矢量就對應了電機的3個繞組,3個繞組就是互差120度的,只要再控制繞組上的電壓大小按照正弦規(guī)律變化,是不是就可以得到大小不變旋轉的總矢量呢?看下面電機定子的坐標系圖:
如果讓繞組上的電壓大小按照正弦規(guī)律變化呢?直接通交流電,就是正弦的呀,可不可以呢?驅動器的控制電路如下:
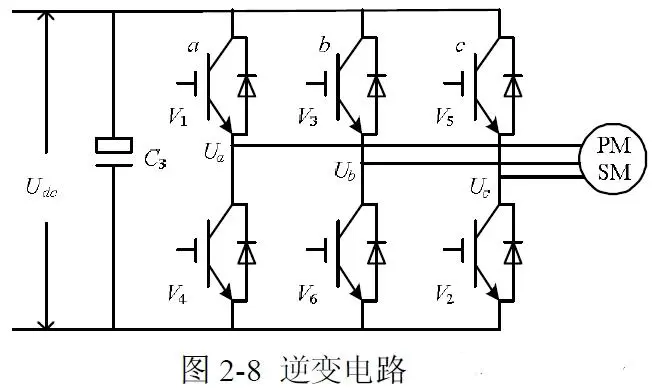
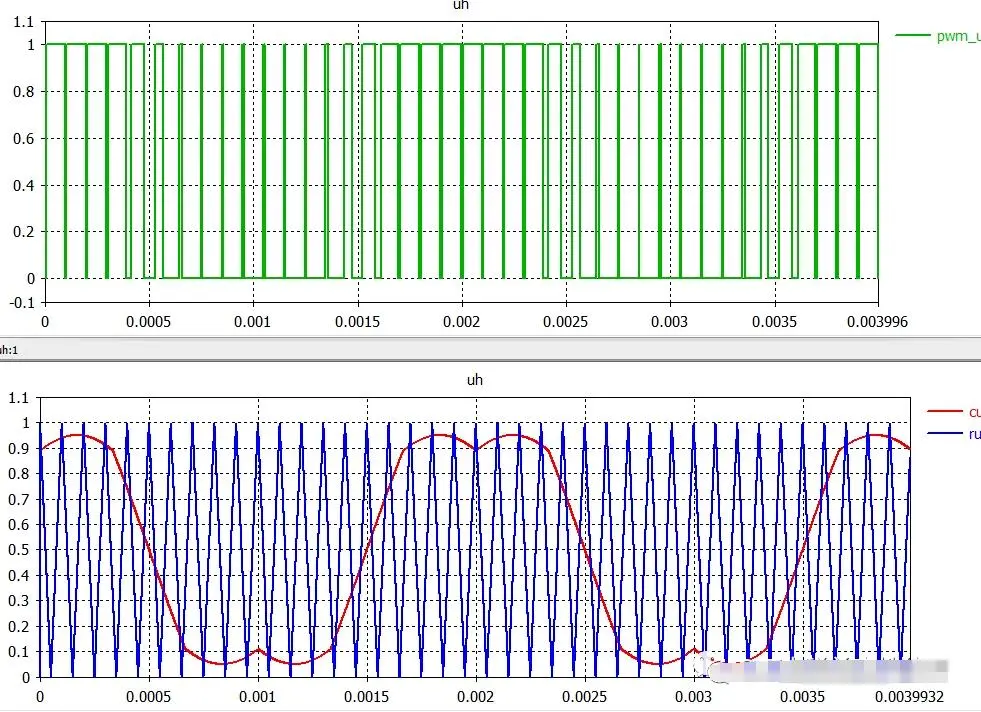
我們只能控制6個管子的開關而已,看來直接通交流電是不行了。于是我們只能控制PWM的占空比來等效正弦:
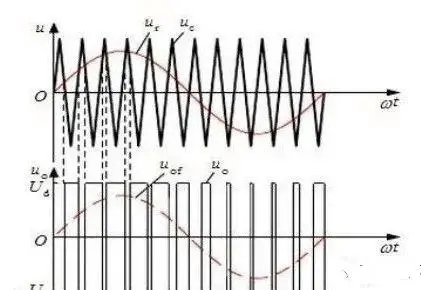
上圖所示占空比越大,電壓越大;占空比越小,電壓越小。讓占空比呈正弦變化,電壓值自然也就呈正弦變化了。 我們用公式來表示一下:定義這三個電壓空間矢量為UA(t)、UB(t)、UC(t),他們方向始終在各自的軸線上,而大小隨時間按正弦規(guī)律變化,時間相位上互差120度。假設Um為相電壓的有效值(相電壓呈正弦變化),f為電源頻率,則有:
SVPWM波
SVPWM波是由三角波和馬鞍波調制生成的,如圖所示,馬鞍波可以通過零序分量注入和六相疊加生成,也有同學通過正弦波和它的三次諧波疊加生成,也是勉強可以接受的。
CST內部的SVPWM波腳本
小編自己使用的六相疊加的算法,顧名思義就是程序上把六個相限的公式寫出來最后疊加在一起,使用CST自帶的VBA編輯器,方便又好用。VB的代碼也比較容易上手。
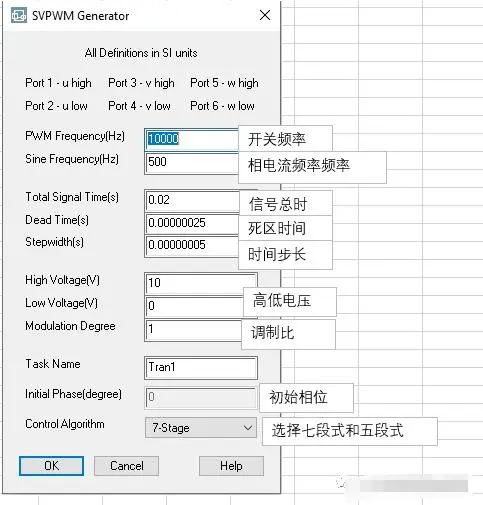
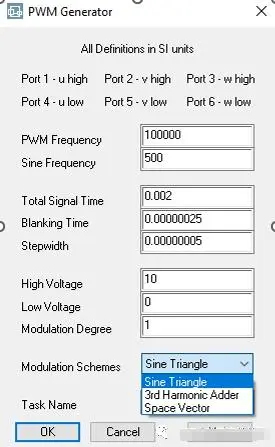
需要設置這么多參數:
(1)開關頻率 (2)相電流頻率,它等于電機轉速X電機磁極對數/60,堵轉的時候它等于0. (3)信號總時間和時間步長,這個設置需要注意,生成的信號采樣點數等于總時間/時間步長,如果采樣點太多會影響到仿真計算時間。 (4)高低電壓,高壓電驅仿真的時候或出現低壓為負壓 (5)初始相位只有堵轉的時候才會用到,窗口才會打開 (6)選擇七段式還是五段式 設置完成所有參數后大功告成,我們來看一下六相疊加的七段式算法生成驅動信號波形圖:
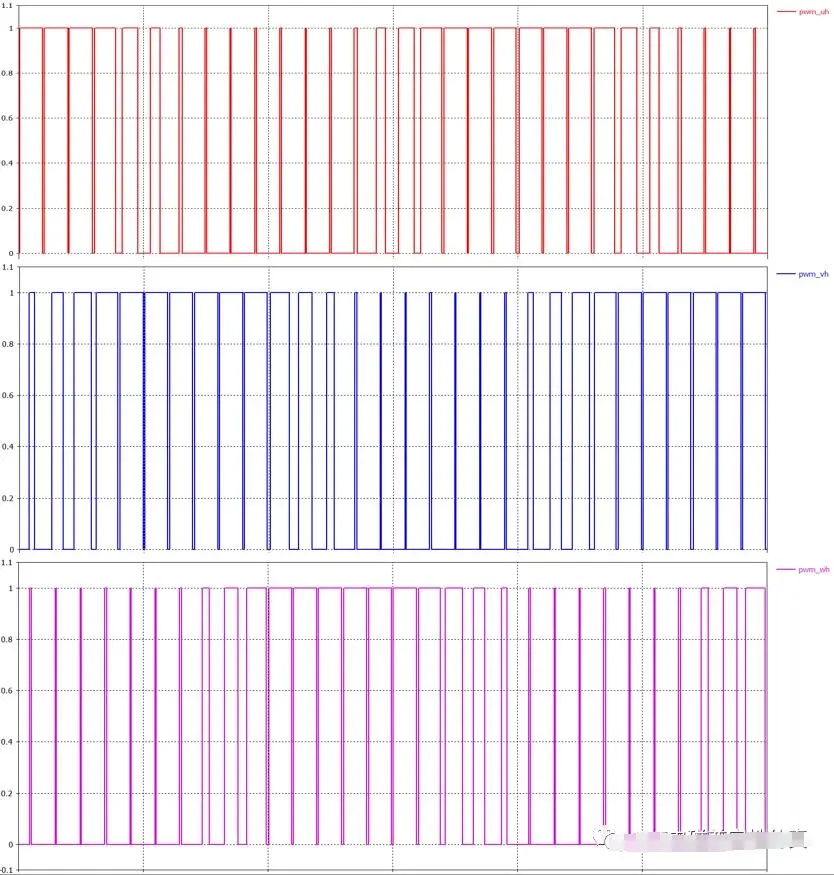
下圖中我們可以看到,在每一個扇區(qū)三相驅動信號的波形都會有七段。
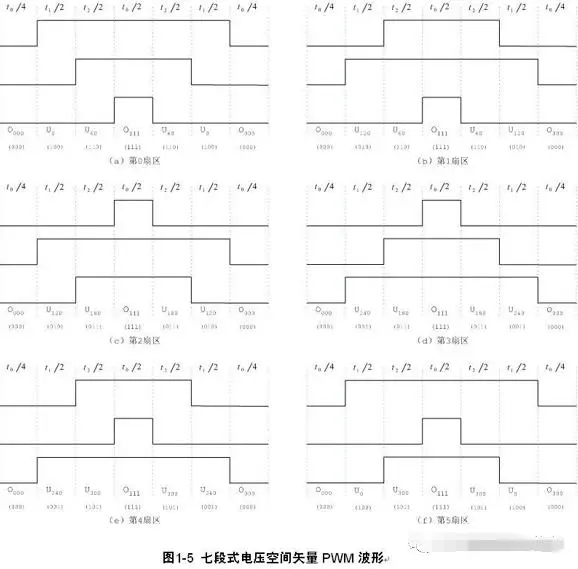
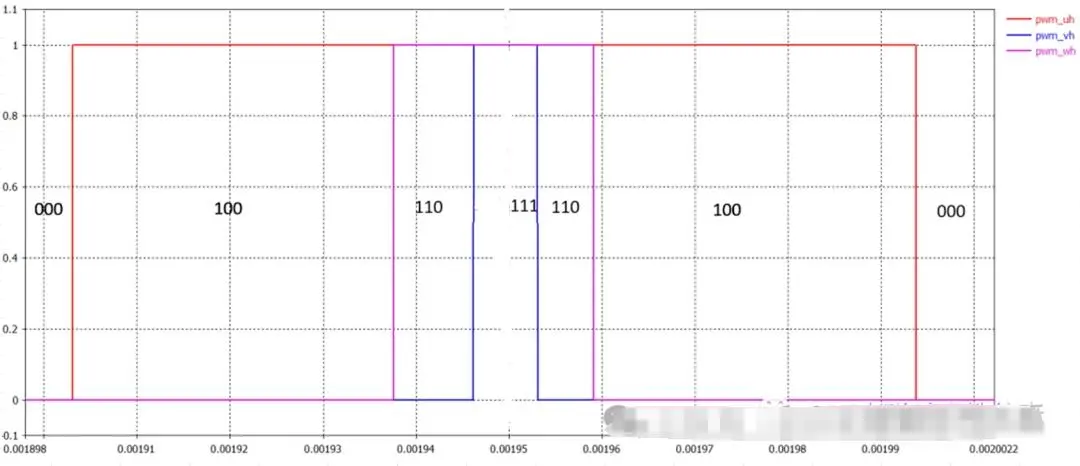
如圖所示,七段式控制的無刷電機的開關模式有七種狀態(tài),所以我們在分析無刷電機的EMI問題時,理論上我們可以把電機運行狀態(tài)分解成七種去分析,000表示三相橋上管mosfet全部關閉 。實際上只需要分析四種三相橋的開關狀態(tài)。
-
PWM
+關注
關注
116文章
5511瀏覽量
219380 -
無刷電機
+關注
關注
60文章
896瀏覽量
47441 -
PCBA
+關注
關注
24文章
1753瀏覽量
53816 -
無刷電動
+關注
關注
0文章
3瀏覽量
5188 -
FOC算法
+關注
關注
1文章
23瀏覽量
9881
發(fā)布評論請先 登錄
簡單分析一下五段式SVPWM和七段式SVPWM的不同點

其利天下技術·FOC控制和方波控制的區(qū)別?分別應用場景是什么?無刷電機驅動方案

請問在SVPWM算法里,7段式SVPWM和5段式SVPWM在編程方面有什么區(qū)別?
通過Matlab/Simulink對SVPWM控制算法進行仿真分析
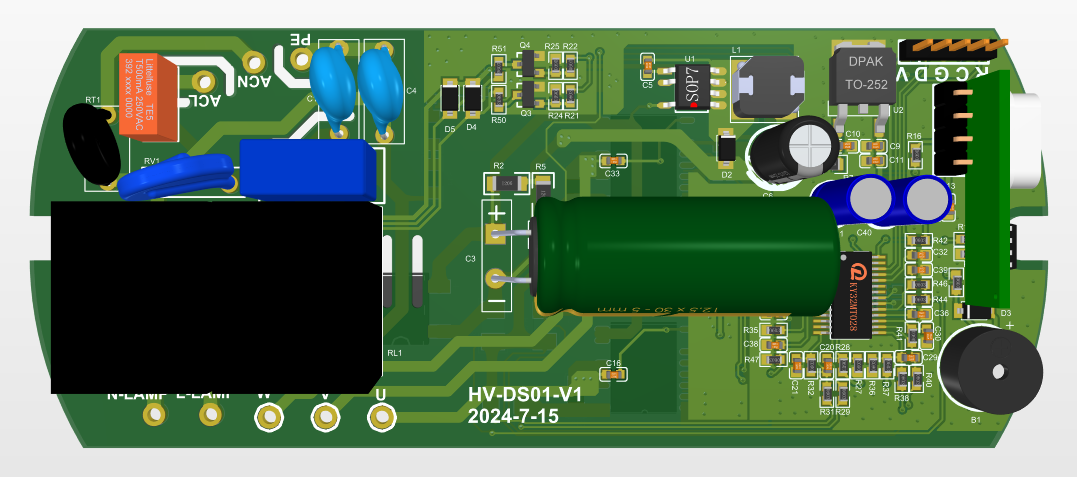
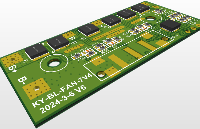
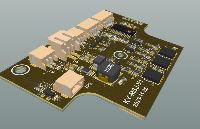
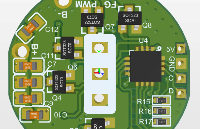
基于FOC無刷電機的按摩器方案以及PCBA介紹【其利天下技術開發(fā)有限公司】
五段式SVPWM和七段式SVPWM的占空比計算詳細中文資料概述
其利天下技術·無刷電機弱磁控制是什么?有什么好處·BLDC驅動方案

其利天下技術·無刷電機常見的5種啟動方式及優(yōu)缺點·無刷電機驅動方案設計開發(fā)
其利天下技術開發(fā)·無刷電機常見的5種啟動方式·無刷電機驅動方案

其利天下技術·低速無刷電機如何更好的控制?無刷電機驅動方案開發(fā)
其利天下技術·無刷電機壽命有多長?軟件能改善嗎?無刷電機驅動

其利天下技術·無刷電機中開環(huán)控制和閉環(huán)控制的區(qū)別·無刷電機驅動方案





 工商網監(jiān)
工商網監(jiān)
評論