 你需要更合適的AR/VR 交互方式嗎?Claw 或許可以
你需要更合適的AR/VR 交互方式嗎?Claw 或許可以
虛擬現實賦予了人們新奇的體驗,雖然視聽的真實震撼令人身臨其境,但它仍然是一個缺少觸感的世界。令人欲罷不能的“擼貓”讓多少大好青年心甘情愿的淪為鏟屎官,很大程度上就是因為這團毛茸茸帶來的讓人身心愉悅的絕妙觸感。為了將高度逼真的虛擬世界賦予“觸”手可及的感覺,研究人員一直在努力著。
最近微軟就推出了一支可以打破次元壁,從現實抓住虛擬的“爪子”,被David Parisi教授稱為“不可思議而又前途無量的果實”
其實在CLAW之前就已經有了幾種增強虛擬觸覺的解決方案,例如外骨骼觸覺裝置與指尖觸覺模式,這些在我們之前的文章中有過一些介紹。
外骨骼手套可以將各種力反饋到每一個指尖,讓整只手好像實實在在的抓住了虛擬物體,然而手套穿戴的麻煩和成本的高昂限制了它的商業用途。指尖觸覺設備比外骨骼輕巧并可以呈現各種觸感,但因為缺少機械連接,因此無法對手指產生阻力來模擬抓握的手感。
CLAW則將這二者進行了完美的融合,而且不同的是,CLAW僅將受力反饋到食指而不是整個手掌上,這大大降低了長時間使用設備后的手部疲勞
爪子結構
不同于其他套在整只手上的觸覺設備,CLAW是手持式的,用戶可以用中指、環指、小指抓住把手來固定claw。拇指可以放在控制器左側的拇指感應區域或者干脆也握在手柄上(這關系到CLAW觸摸模式的更改)。

CLAW具有用于檢測拇指位置的傳感器以及多個輸入按鈕。在“爪子”的五指中,最重要的當屬食指。用戶將食指放入機械臂末端的開口處,食指指尖下方是音圈致動器(VCA)模擬物體表面的紋理質感,例如當手拂過VR中的木頭時,手指仿佛真真切切的摸到了木頭表面的紋路。緊靠食指上方的力傳感器感測食指觸摸、抓握、觸發的力道大小,被包裹住的食指變成了人與虛擬交互的窗口。力傳感器上額外的旋轉鉸鏈成全了CLAW如扣動扳機般的觸發機制。
手柄底部安裝的HTC Vive追蹤器,可以在VR場景中實現6自由度IMU的追蹤。最后,以上部件數據分析得到的運動學反饋即力的感覺、致動以及位移都是通過長度可調的旋轉臂(下方CLAW觸覺模式圖綠色部分)來實現,在抓握和觸摸虛擬物體時對食指施加阻力,讓使用者感受到虛擬物體的輪廓或是擠壓松軟的東西的手感,不至于在VR場景中發生手與物體重疊在一起的BUG。
爪子的觸覺模式
觸摸模式(左上):當用戶收起拇指休息時,控制器處于默認的“觸摸模式”
抓取模式(右上):當拇指接近紅色傳感器與食指對齊時,控制器轉換到“抓取模式”
射擊模式(中下):當用戶抓住“槍”時,旋轉臂(綠色)會自動旋轉到位,變形為槍支形態,手指模塊(粉紅色)即為扳機,對于FPS玩家真是貼心之舉。
有了這么齊全的反饋設施,那么CLAW究竟是怎么精確抓住那些虛擬物體的呢?
握住CLAW的指尖可以發出綠色光線,當然這束光線用戶是看不見的,通過檢查食指、拇指指尖發出的光線與虛擬物體是否相交來判斷。如果這兩條光線都與一個小公差緩沖區(1厘米)內的相同物體相交,那么我們的“爪子”就成功抓到了虛擬物體。抓住物體后,通過CLAW進行剛度渲染。我們的觸覺在控制器上會呈現類似的彈簧行為,因此我們可以模擬不同的材料(木材、金屬)或軟物體(黏土、橡膠球、海綿)。在閉環力控制系統下,CLAW能夠產生高達30N的抓力和高達10N /度(5.73N / mm)的剛度。
限制和未來
適用于VR場景的CLAW,同樣可以輕松地用于AR,手持式無線CLAW將允許用戶同真實世界中的虛擬對象交互。但是想要達到這種運用程度還需要進行一些改進。例如CLAW尚未配備無線功能,外接線路束縛住了在VR中探索的自由。而且目前的CLAW只有右手版本,若能用兩個CLAW模擬雙手在VR世界中探索相信會更有趣。
總而言之,虛擬與現實世界之間的距離正在縮小,CLAW使得虛擬世界不光可以看得見,還可以摸得著,虛擬現實不再“觸”不可及。
-
Ar
+關注
關注
25文章
5147瀏覽量
172257 -
vr
+關注
關注
34文章
9669瀏覽量
152274
發布評論請先 登錄
AR智能眼鏡基礎交互困局突圍:AI+攝像頭破局支付場景
晶體晶振在AR/VR設備中的作用

學硬件好還是學軟件好?
AR互動與傳統的交互方式相比更加豐富多元
AR和VR中的計算機視覺

杭晶電子:晶振在AR/VR中的應用
ar與虛擬現實的區別 如何優化ar應用的用戶界面
如何使用ar增強現實體驗
恒訊科技分析:如何根據企業規模選擇合適的網絡拓撲結構?
Meta在VR與AR領域的探索與挑戰

XR與AR和VR的區別是什么
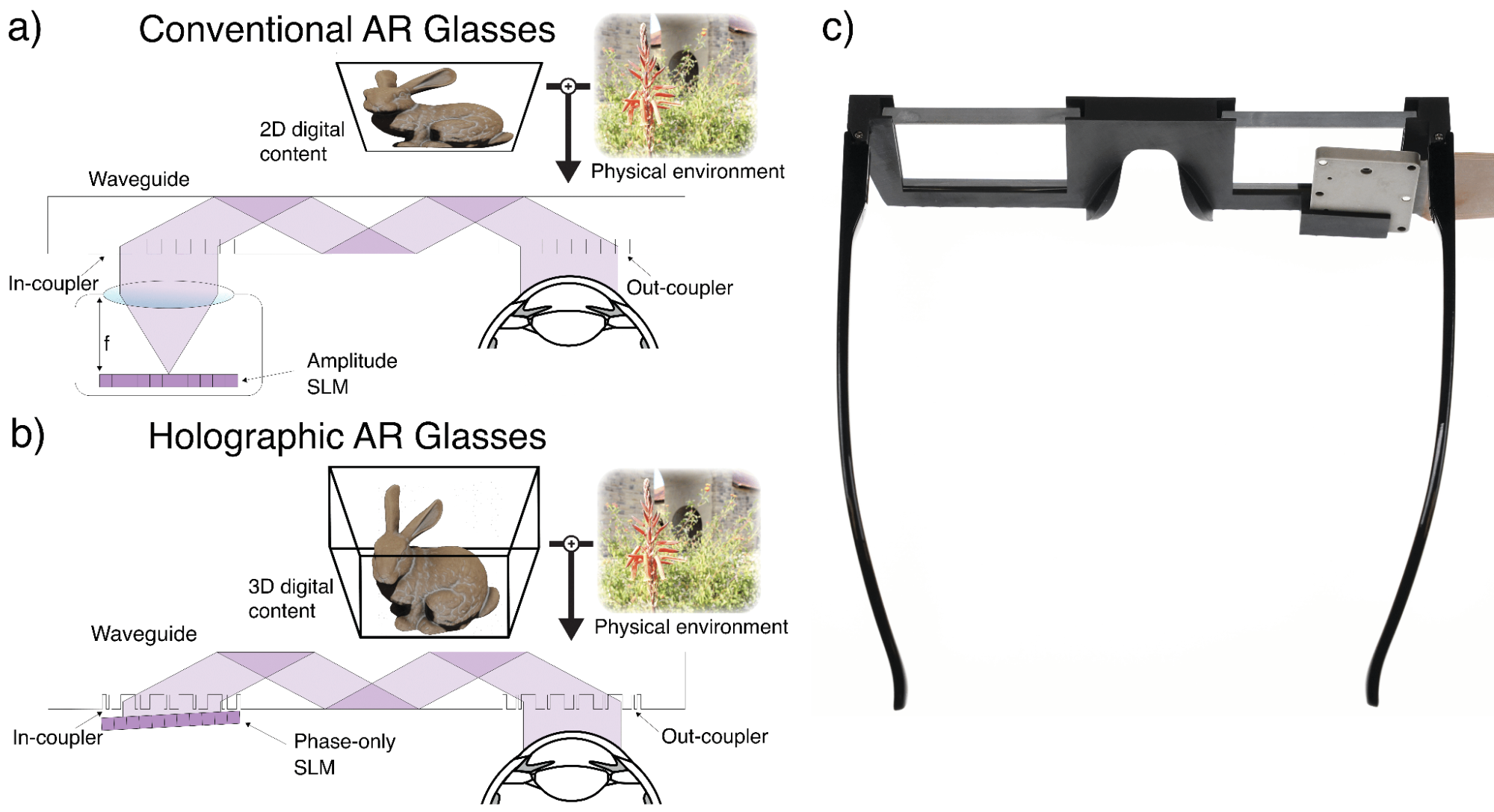
XR與AR和VR的區別 如何使用人工智能開發更小、更輕的擴展現實眼鏡





 工商網監
工商網監
評論