") 步進控制的光柵尺全閉環(huán)解決方案:32軸EtherCAT總線運動控制器ZMC432CL-V2
步進控制的光柵尺全閉環(huán)解決方案:32軸EtherCAT總線運動控制器ZMC432CL-V2

您是否還在為步進電機無法在旋轉(zhuǎn)機構(gòu)、絲桿傳動等機械傳動平臺上無法實現(xiàn)高精度末端定位,未能達到亞微米級加工精度而感到困擾?
傳統(tǒng)開環(huán)系統(tǒng)困境
傳統(tǒng)步進電機方案采用開環(huán)控制,用于位置控制,信號單向傳遞,無法實時監(jiān)測和糾正機械傳動位移誤差。當遇到負載變化、步進電機失步或外部干擾時,位置誤差無法補償校正,直接影響加工精度,無法滿足用戶對亞微米級加工精度的應(yīng)用需求。

開環(huán)控制系統(tǒng)原理示意圖
正運動步進控制的光柵尺全閉環(huán)解決方案:ZMC432CL-V2
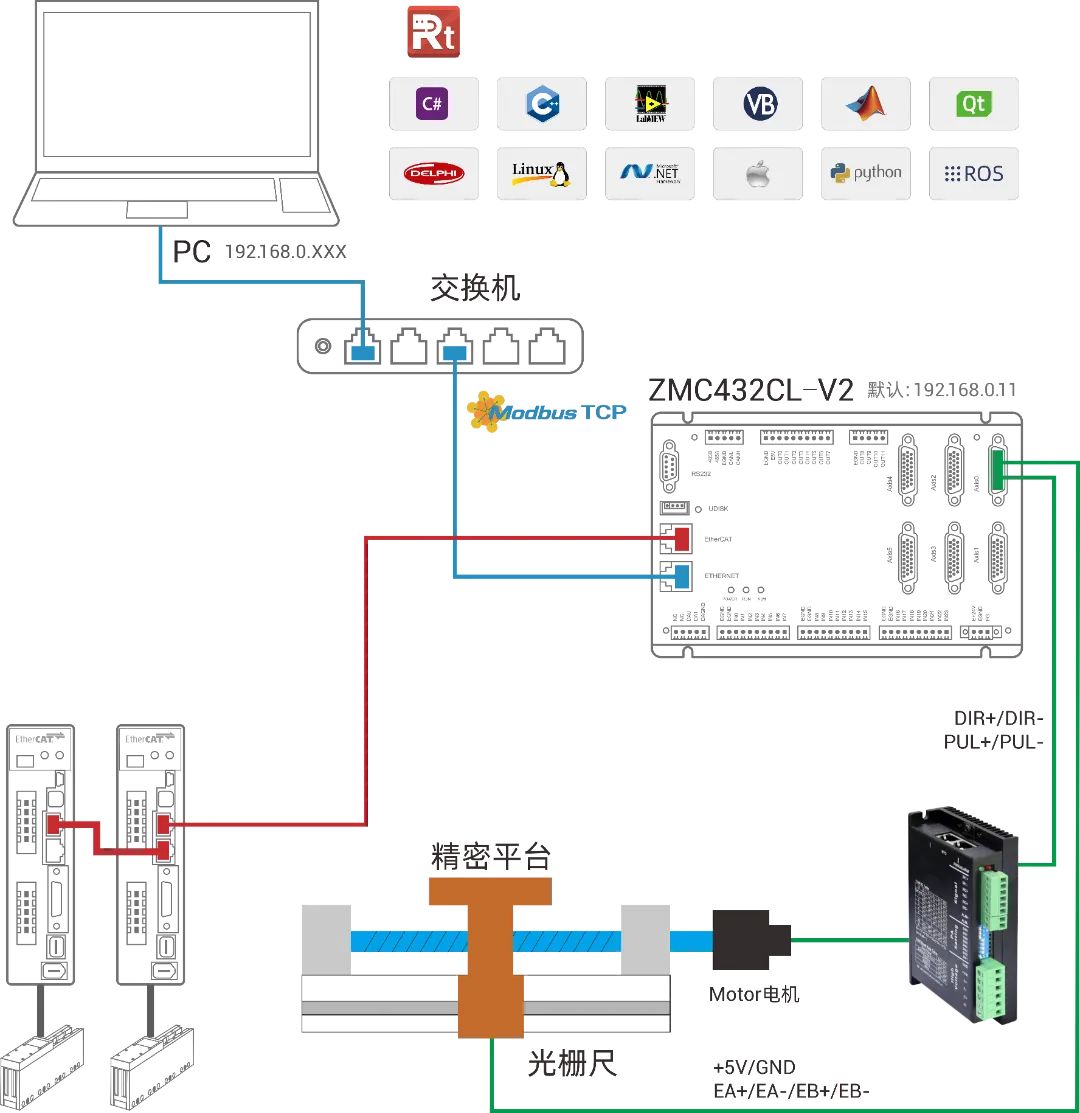
為了解決這些問題,正運動ZMC432CL-V2脈沖全閉環(huán)32軸總線型運動控制器應(yīng)運而生!專為解決步進電機高精度定位應(yīng)用需求而設(shè)計,幫助您輕松實現(xiàn)亞微米級的加工精度!
通過引入外置光柵尺全閉環(huán)解決方案,再配合控制器內(nèi)置的補償算法,可輕松實現(xiàn)動態(tài)矯正,有效消除機械傳動平臺在運動過程中的傳動位移誤差,保障定位精度,徹底解決步進驅(qū)動器在傳動過程中可能出現(xiàn)的失步風險。
ZMC432CL-V2產(chǎn)品介紹視頻
01 步進電機的外置光柵尺全閉環(huán)解決方案
ZMC4系列高效的網(wǎng)口讀寫,PCIe/PCI系列卡可共享內(nèi)存接口(共享內(nèi)存的批量讀寫3-5us);
內(nèi)置反向間隙補償,雙向螺距補償,2D平面補償?shù)龋?/p>
可以同時支持脈沖軸和EtherCAT軸運動混合使用;
開放的PT/PVT接口客戶可自定義加減速算法的二次編程;
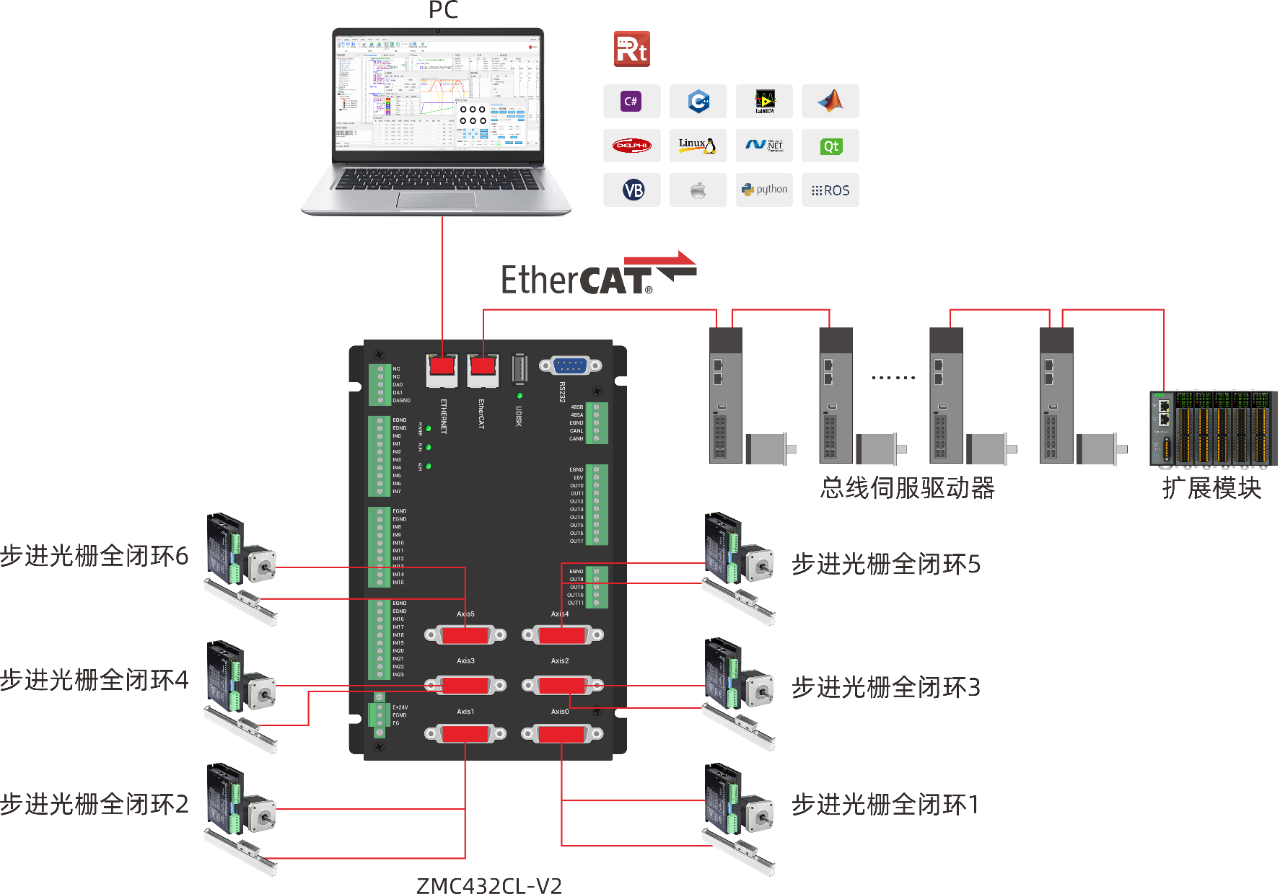
ZMC432CL-V2可支持步進電機的外置光柵尺全閉環(huán)解決方案。
正運動技術(shù)新品ZMC4系列多軸總線型運動控制器!
解決用戶所難,貼近用戶實際應(yīng)用需求!
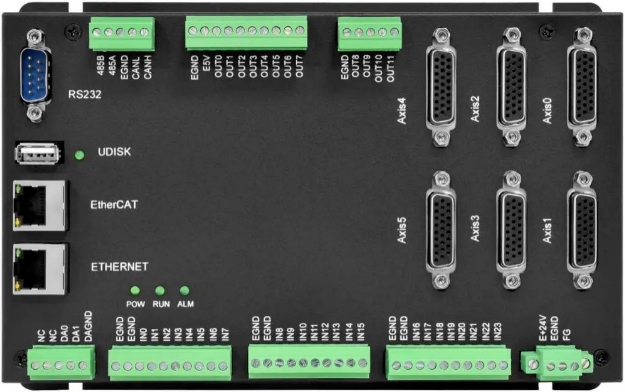
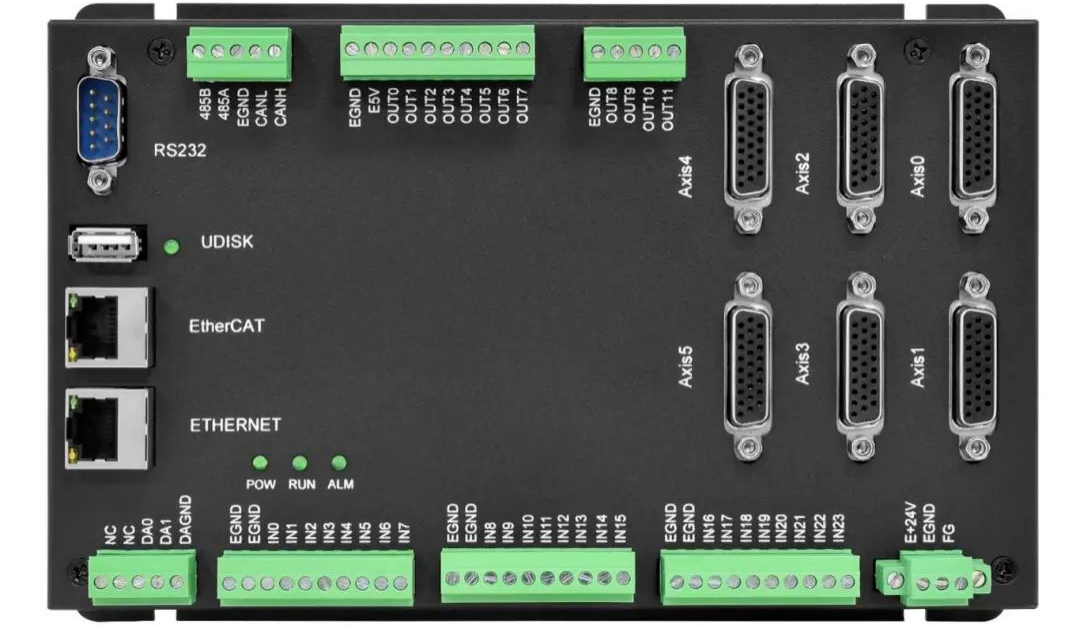
02 ZMC432CL-V2脈沖全閉環(huán)的32軸總線型運動控制器
ZMC432CL-V2是一款高性能運動控制器,具備高速實時反饋功能,支持脈沖全閉環(huán)控制,能夠?qū)崿F(xiàn)高精度、高響應(yīng)速度的運動控制。高精度定位,有效消除機械傳動誤差,滿足高精密加工場景應(yīng)用要求。
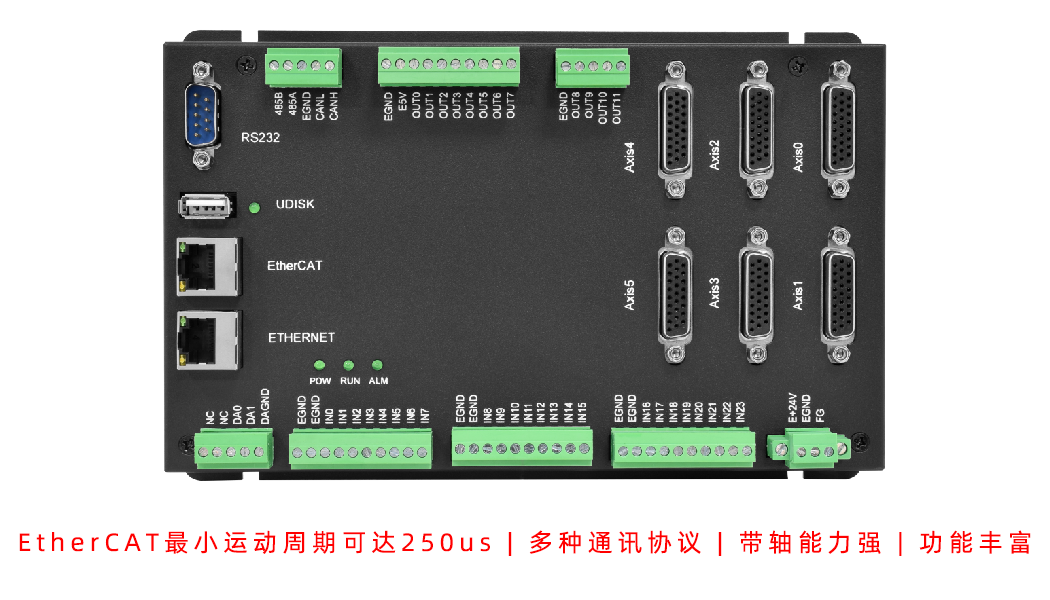
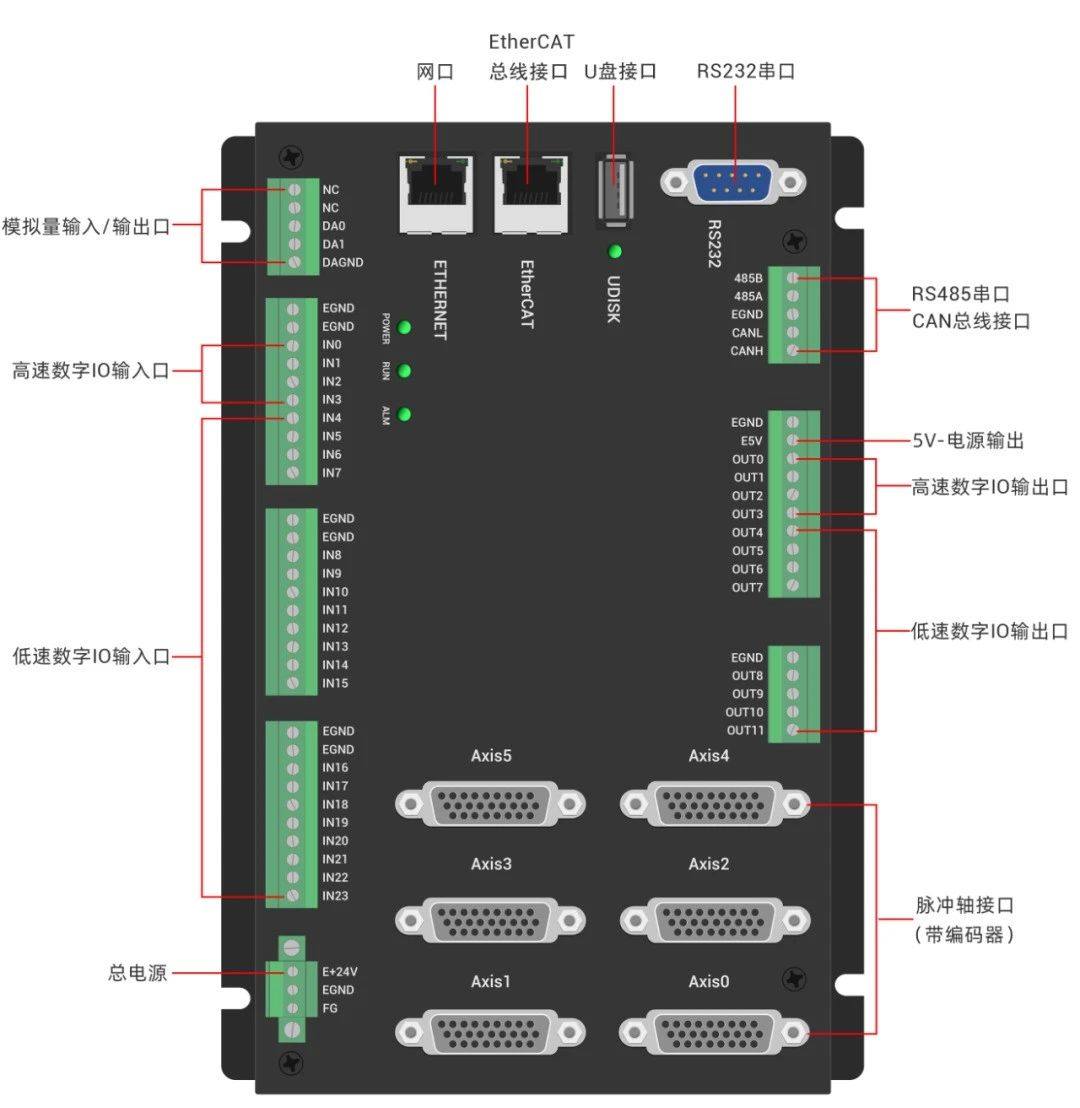
(1)硬件功能特性:
可選6-32軸運動控制,支持EtherCAT總線軸、單端脈沖軸、差分脈沖軸、單端編碼器軸和差分編碼器接口;
24路通用數(shù)字量輸入+6路軸接口內(nèi)置數(shù)字量輸入,12路通用數(shù)字量輸出+6路軸接口內(nèi)置數(shù)字量輸出;數(shù)字量輸入/輸出最多可擴展至4096路;
2路模擬量輸出DA;模擬量輸出DA最多可擴展至512路;
硬件比較輸出PSO、高速鎖存、PWM、30+機械手控制、連續(xù)插補、軌跡前瞻等功能;
支持RS232、RS485、CAN總線以及EtherNET網(wǎng)口等通訊接口。
(2)產(chǎn)品優(yōu)勢一覽:
1.強大的32軸同步控制
支持多達32軸的同步運動控制,滿足復雜多軸聯(lián)動的工業(yè)應(yīng)用需求,如光電子耦合設(shè)備,精密機械加工、電子封裝設(shè)備、半導體封裝&測試等領(lǐng)域。
2.支持EtherCAT運動控制與6個脈沖閉環(huán)的運動控制
兼容主流工業(yè)EtherCAT總線控制網(wǎng)絡(luò)協(xié)議,實現(xiàn)高速、穩(wěn)定的數(shù)據(jù)傳輸,簡化系統(tǒng)布線,靈活擴展軸數(shù)。也支持EtherCAT運動控制與6個脈沖閉環(huán)的運動控制的同時運動。
3.高速脈沖輸出、I/O控制和模擬量DA控制
支持高速脈沖輸出,滿足高速、高精度的運動控制需求。提供豐富的數(shù)字IO和模擬DA接口,方便與各種傳感器和執(zhí)行器集成。
4.支持使用現(xiàn)成的API二次開發(fā)各種裝備
支持多種編程語言,方便用戶進行二次開發(fā),快速實現(xiàn)定制化功能。

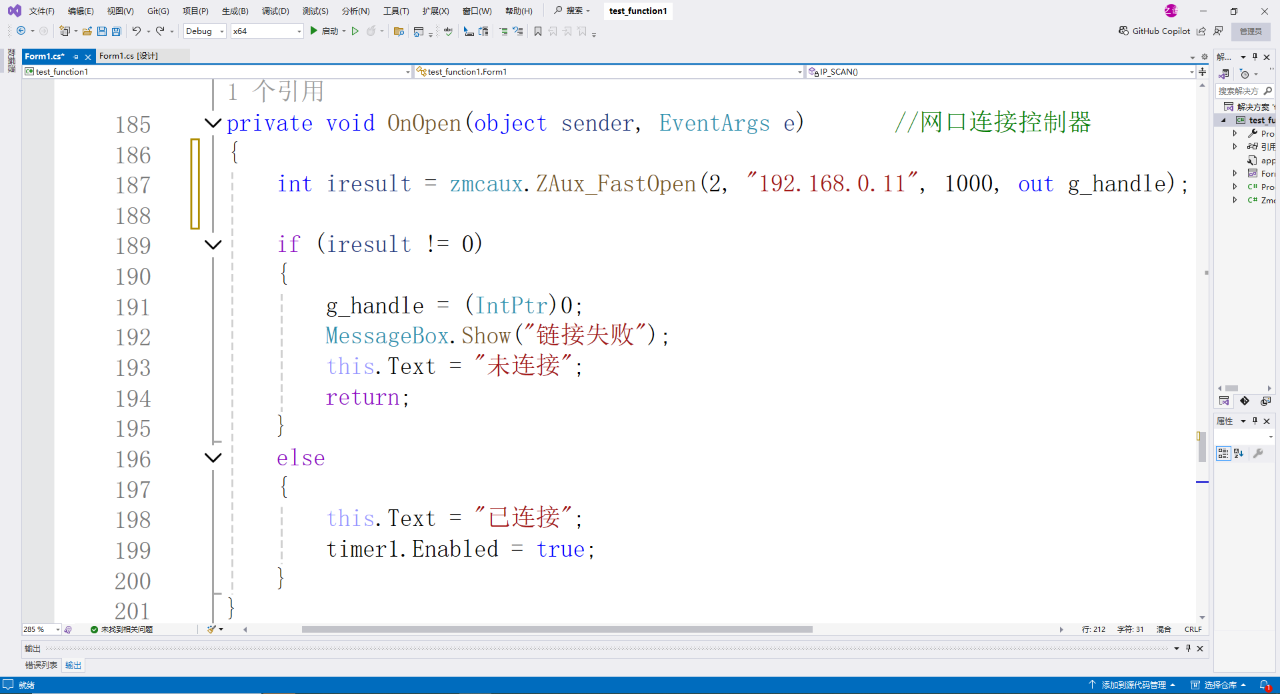
C#開發(fā)
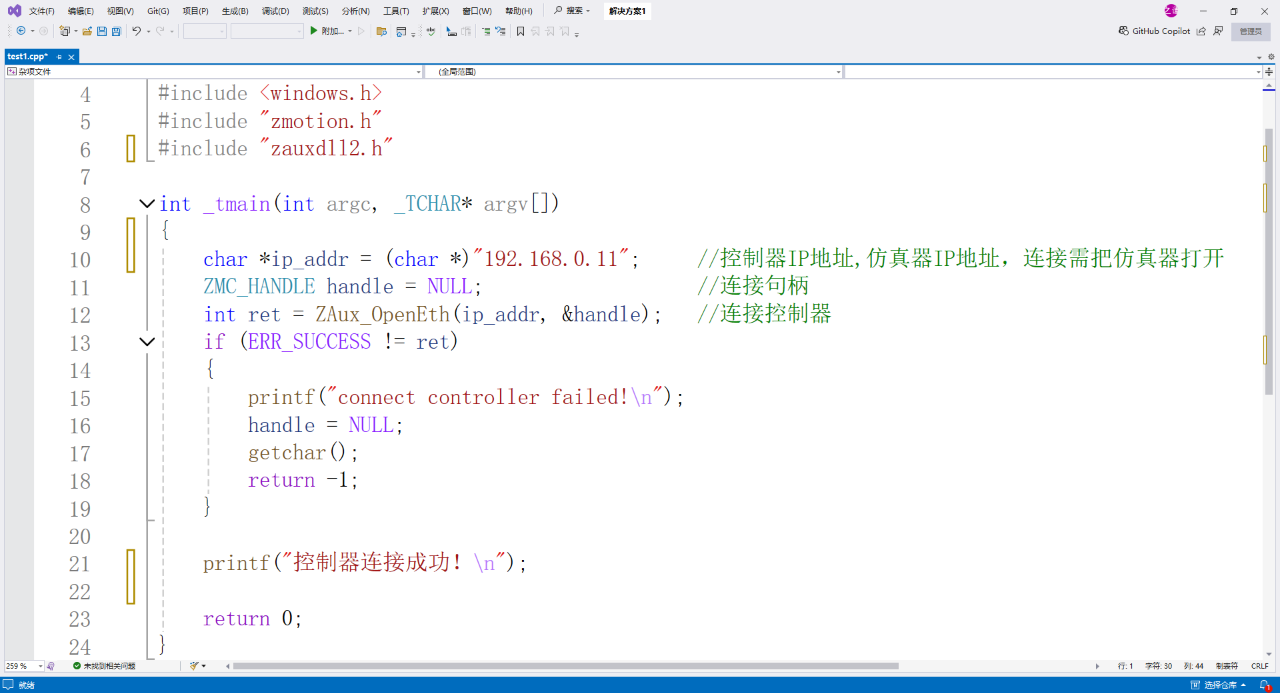
C++開發(fā)
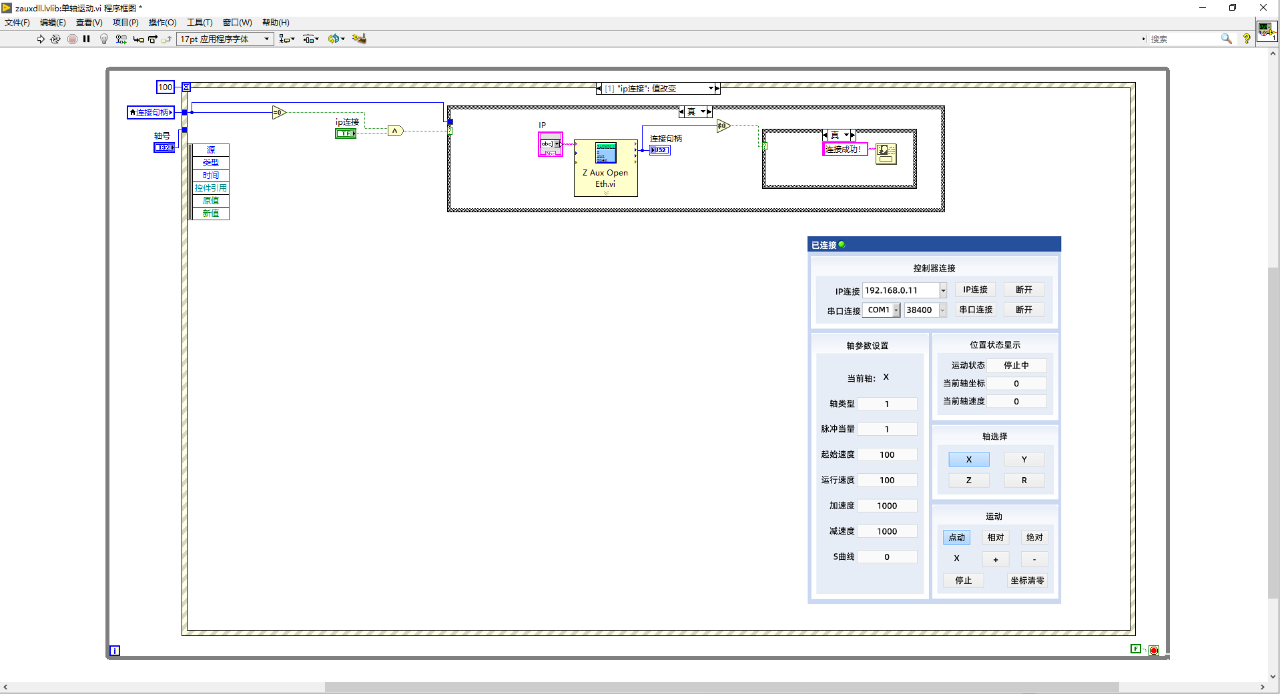
LabVIEW開發(fā)
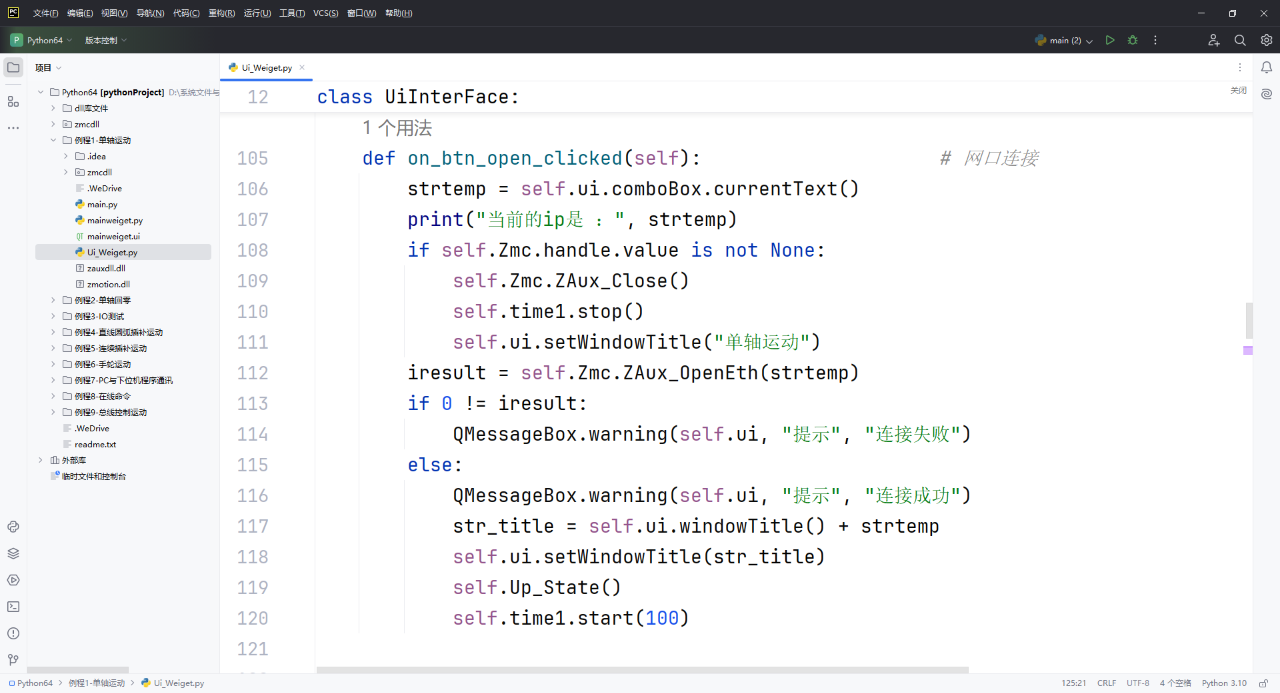
Python開發(fā)
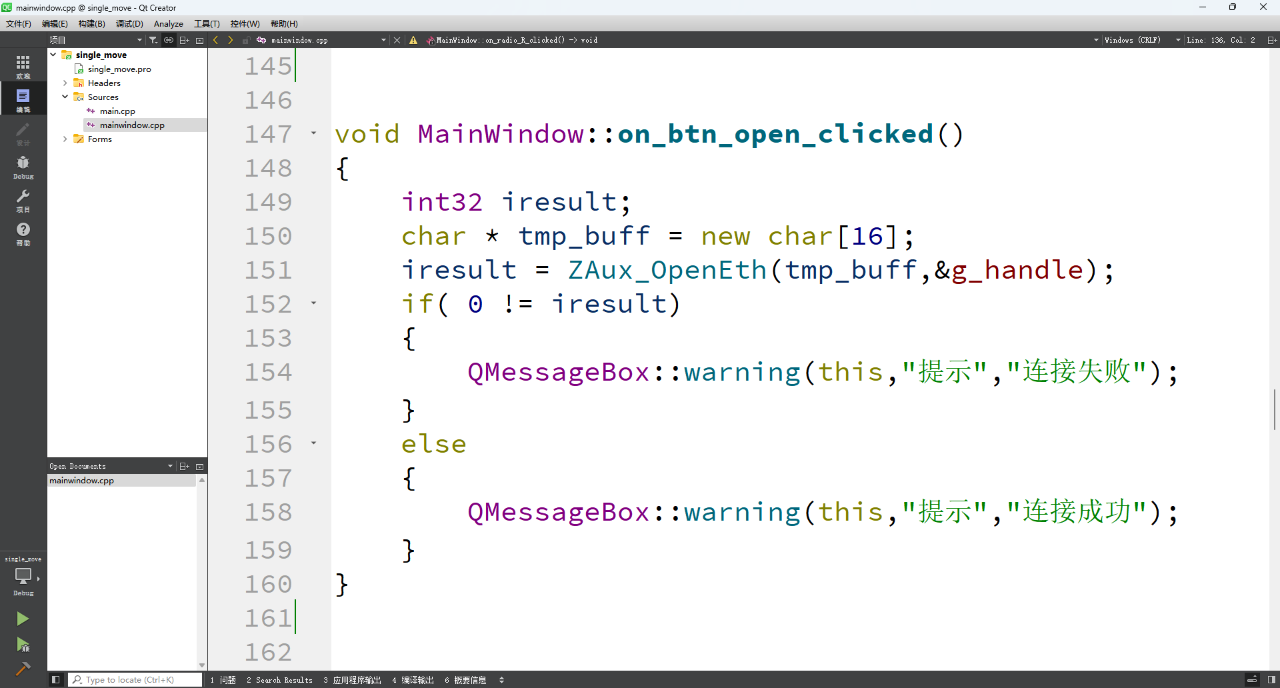
QT開發(fā)
5.支持純國產(chǎn)IDE開發(fā)環(huán)境RTSys進行項目開發(fā)
通過純國產(chǎn)IDE開發(fā)環(huán)境RTSys進行項目開發(fā),可實時仿真、在線跟蹤以及診斷與調(diào)試,簡便易用,支持多種高級上位機語言聯(lián)合編程進行二次開發(fā)。
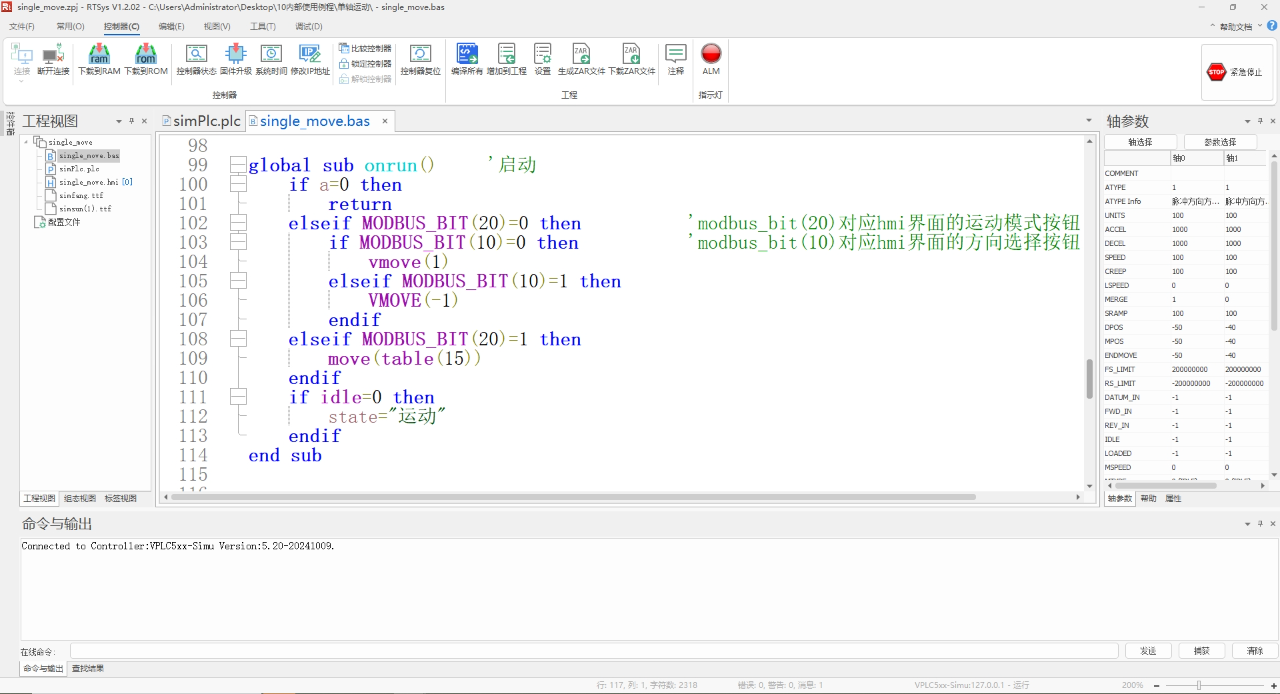
RTBasic界面
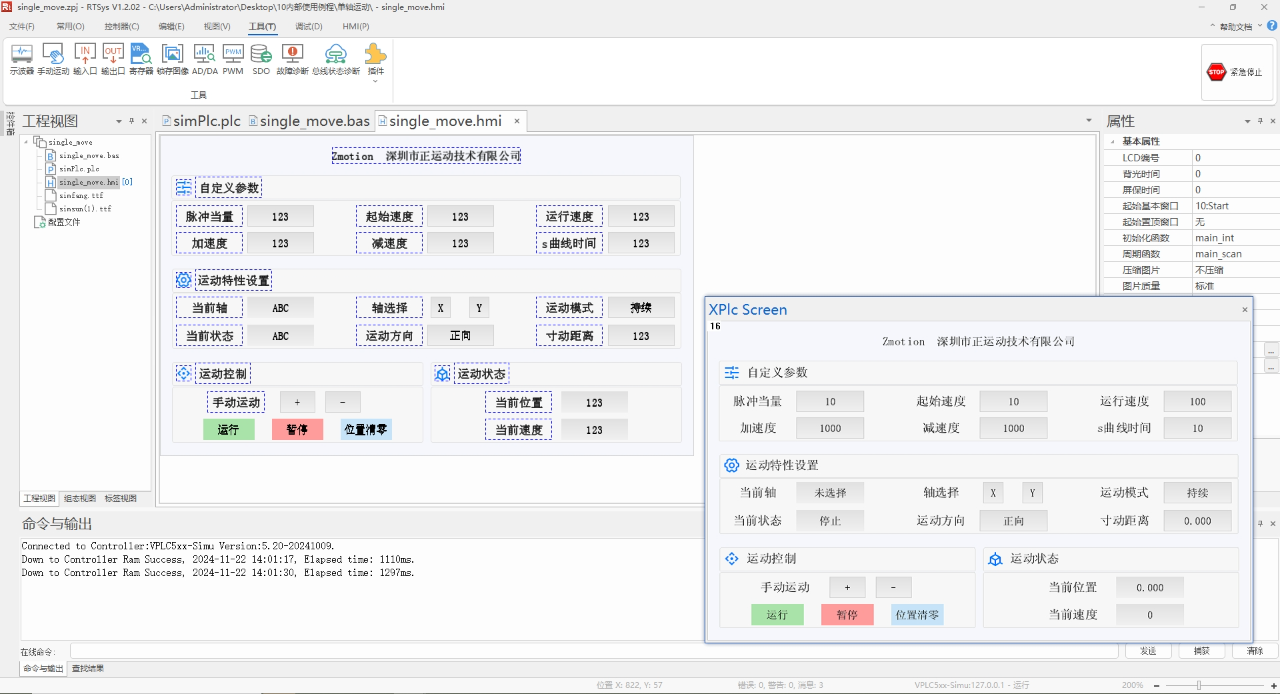
RTHmi界面
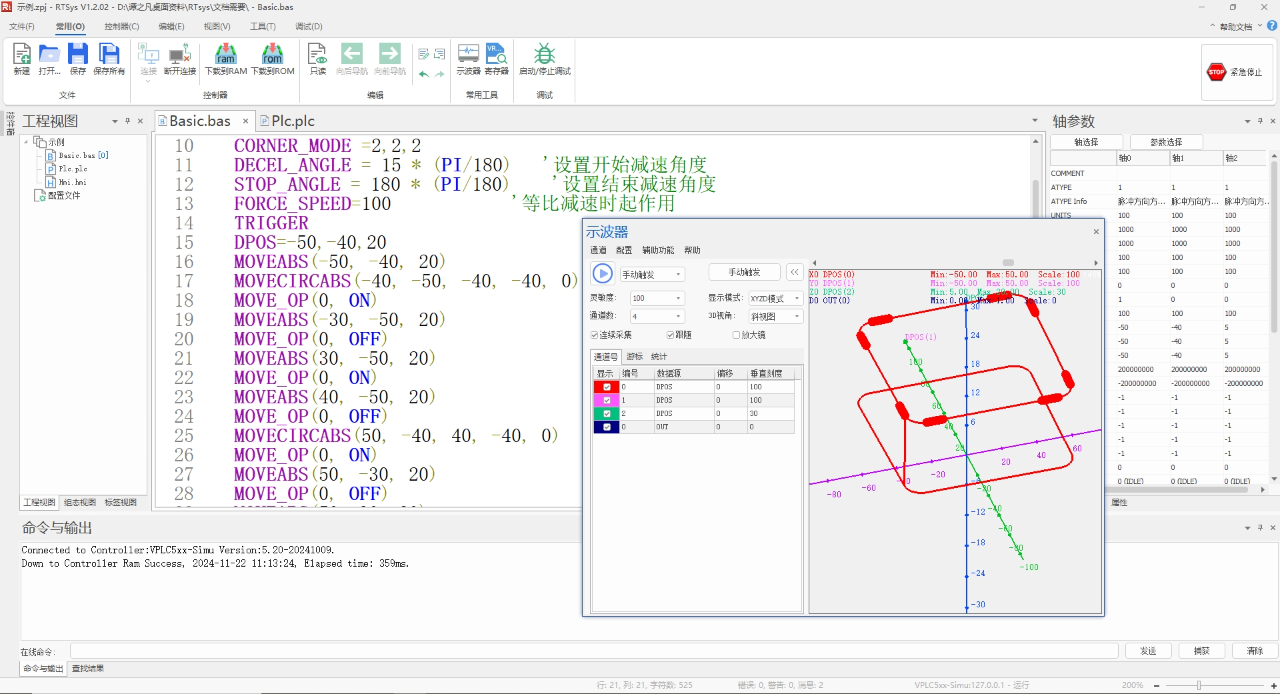
示波器界面
(3)核心功能介紹:
1、高精度PSO,等間距輸出
2、PWM,模擬量與速度同步輸出
3、高速鎖存輸入
4、速度自適應(yīng)前瞻

03ZMC432CL-V2市場應(yīng)用
摒棄傳統(tǒng)開環(huán)控制對設(shè)備性能的束縛!選擇ZMC432CL-V2,采用高精度光柵尺的脈沖全閉環(huán),消除傳動誤差,改善步進系統(tǒng)的亞微米級加工性能!
正運動技術(shù)專注于運動控制技術(shù)研究和通用運動控制軟硬件產(chǎn)品的研發(fā),是國家級高新技術(shù)企業(yè)。正運動技術(shù)匯集了來自華為、中興等公司的優(yōu)秀人才,在堅持自主創(chuàng)新的同時,積極聯(lián)合各大高校協(xié)同運動控制基礎(chǔ)技術(shù)的研究,是國內(nèi)工控領(lǐng)域發(fā)展最快的企業(yè)之一,也是國內(nèi)少有、完整掌握運動控制核心技術(shù)和實時工控軟件平臺技術(shù)的企業(yè)。主要業(yè)務(wù)有:運動控制卡_運動控制器_EtherCAT運動控制卡_EtherCAT控制器_運動控制系統(tǒng)_視覺控制器__運動控制PLC_運動控制_機器人控制器_視覺定位_XPCIe/XPCI系列運動控制卡等等。
審核編輯 黃宇
-
運動控制器
+關(guān)注
關(guān)注
2文章
445瀏覽量
25148 -
運動控制
+關(guān)注
關(guān)注
4文章
638瀏覽量
33371 -
運動控制系統(tǒng)
+關(guān)注
關(guān)注
0文章
93瀏覽量
14344 -
EtherCAT總線
+關(guān)注
關(guān)注
5文章
80瀏覽量
5648 -
正運動技術(shù)
+關(guān)注
關(guān)注
0文章
118瀏覽量
607
發(fā)布評論請先 登錄
100%器件全國產(chǎn)化認證:ZMC432HG系列EtherCAT運動控制器通過全國產(chǎn)化認證!
步進的光柵尺全閉環(huán)EtherCAT運動控制器ZMC432CL-V2(四):LabVIEW編程調(diào)試

步進的光柵尺全閉環(huán)EtherCAT運動控制器ZMC432CL-V2(四):LabVIEW編程調(diào)試 #正運動
直線電機模組中光柵尺和磁柵尺的區(qū)別

步進的光柵尺全閉環(huán)EtherCAT運動控制器ZMC432CL-V2(三):C#編程調(diào)試 #正運動技術(shù)
步進的光柵尺全閉環(huán)EtherCAT運動控制器ZMC432CL-V2:RTSys編程調(diào)試# 正運動技術(shù)# 控制器
步進的光柵尺全閉環(huán)EtherCAT運動控制器ZMC432CL-V2(二):RTSys編程調(diào)試
ZMC600E運動控制器直線和圓弧插補算法詳解

ZMC600E運動控制器T型、S型速度規(guī)劃詳解
光柵尺和編碼器的區(qū)別 光柵尺和編碼器哪個精度高

步進控制的光柵尺全閉環(huán)解決方案:32軸EtherCAT總線運動控制器ZMC432CL-V2 #正運動技術(shù)

脈沖全閉環(huán)EtherCAT運動控制器的固件升級 #正運動技術(shù) #擴展模塊 #IO模塊 #運動控制器
脈沖全閉環(huán)EtherCAT運動控制器的固件升級






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論