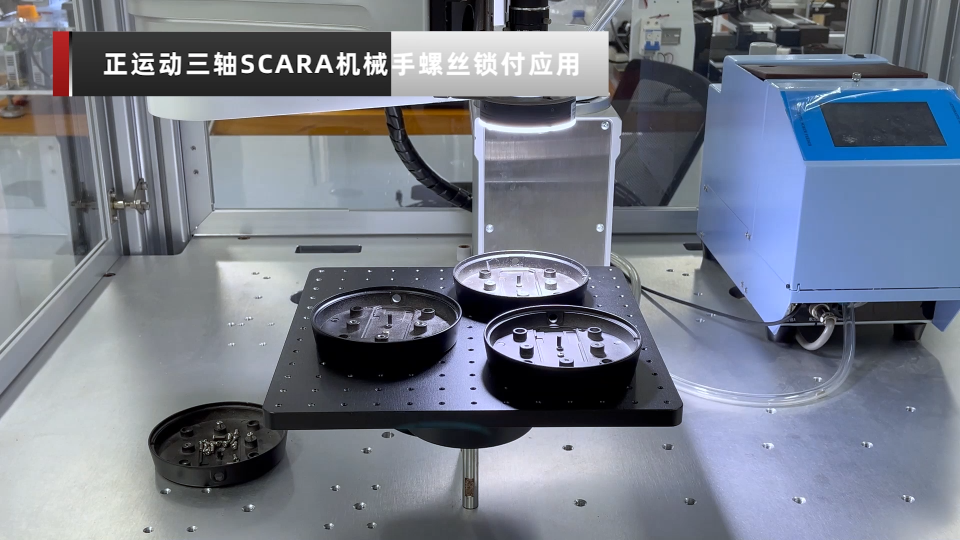
") VPLC7機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)在三軸SCARA機(jī)械手螺絲鎖付的應(yīng)用
VPLC7機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)在三軸SCARA機(jī)械手螺絲鎖付的應(yīng)用

市場(chǎng)應(yīng)用背景
近年來(lái),螺絲鎖付市場(chǎng)需求持續(xù)增長(zhǎng),特別是在3C消費(fèi)電子、汽車(chē)組裝及家電等領(lǐng)域裝配生產(chǎn)線上。產(chǎn)品設(shè)計(jì)的多樣化、精細(xì)化,推動(dòng)制造型企業(yè)對(duì)螺絲鎖付的精度、效率和產(chǎn)線柔性化等提出了更高要求,促進(jìn)了SCARA機(jī)械手螺絲鎖付技術(shù)的廣泛應(yīng)用,顯著提升螺絲擰緊效率和精度,減少了對(duì)人工的依賴,并有效實(shí)現(xiàn)了批量組裝及靈活換料換線生產(chǎn)。

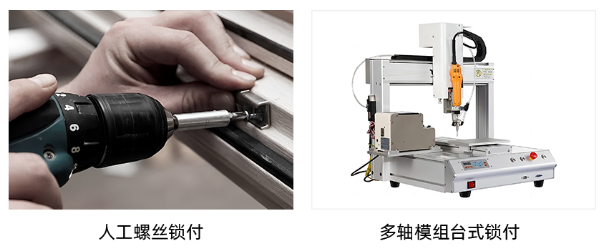
市面上常見(jiàn)的螺絲鎖付方案局限性:
市面上常見(jiàn)的螺絲鎖付方案,包括手持電批和多軸模組臺(tái)式螺絲鎖付設(shè)備,雖然廣泛應(yīng)用于多種緊固場(chǎng)景,但它們在滿足高或特定扭矩精度需求,同一工位擰緊多種類型螺絲,以及快速產(chǎn)品切換和混料生產(chǎn)等方面需求存在一定的局限,都可直接影響鎖付工藝流程的效率和質(zhì)量管控。
正運(yùn)動(dòng)技術(shù)解決方案:
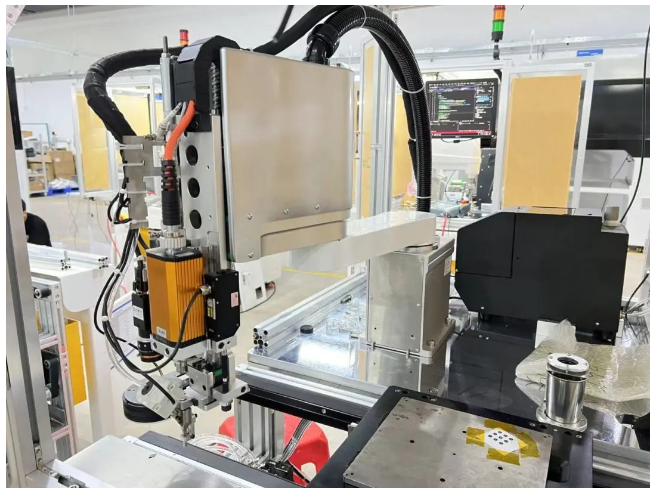
正運(yùn)動(dòng)針對(duì)以上市場(chǎng)需求,特此開(kāi)發(fā)了一款基于VPLC7機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)的三軸SCARA機(jī)械手螺絲鎖付應(yīng)用解決方案,易于集成至客戶現(xiàn)有裝配線,提供獨(dú)立操作站點(diǎn),可根據(jù)生產(chǎn)需求自動(dòng)切換工藝配方或工位調(diào)整,同時(shí)支持間歇性或連續(xù)大批量生產(chǎn),適用于平面、沉孔和側(cè)邊的螺絲鎖付,配合視覺(jué)采集系統(tǒng),即可實(shí)現(xiàn)高速高精的螺絲鎖付應(yīng)用。
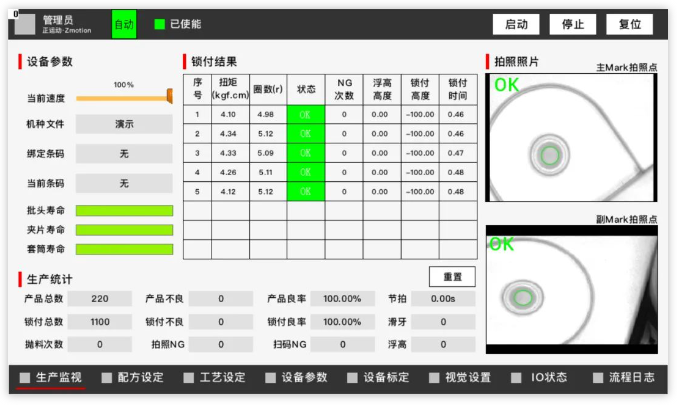
方案支持機(jī)械手執(zhí)行單個(gè)/多個(gè)批頭鎖付任務(wù),可靈活更換批頭以適配不同類型的螺絲,可設(shè)置不同的鎖附工藝(如扭力、轉(zhuǎn)速、鎖附高度、退釘?shù)龋?strong>提供鎖付全程實(shí)時(shí)監(jiān)控?cái)?shù)據(jù),包括鎖螺絲的扭力、圈數(shù)、鎖付狀態(tài)、鎖付結(jié)果、浮高高度、鎖付高度、鎖付時(shí)間等,做到每鎖一顆螺絲即可生成鎖付結(jié)果。
機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)通過(guò)直接控制機(jī)器人來(lái)縮短循環(huán)時(shí)間,實(shí)現(xiàn)系統(tǒng)的集中管理,并提高鎖付良率至99.6%。

01 VPLC7機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)在三軸SCARA機(jī)械手螺絲鎖付的應(yīng)用
1、傳統(tǒng)的機(jī)械手螺絲鎖付方案

傳統(tǒng)的機(jī)械手螺絲鎖付方案通常采用機(jī)器人驅(qū)動(dòng)控制一體機(jī)+PLC+視覺(jué)系統(tǒng)的組合方案,存在以下問(wèn)題:
配件多、接線繁瑣、故障排查麻煩、開(kāi)發(fā)周期長(zhǎng);
視覺(jué)與運(yùn)動(dòng)控制之間的數(shù)據(jù)交互效率不高;
軟硬集成度不高,功能整合度低;
多套硬件初始成本和維護(hù)成本高。
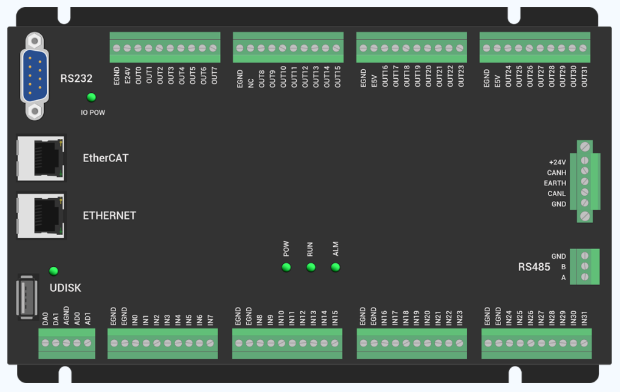
2、正運(yùn)動(dòng)技術(shù)SCARA螺絲鎖付方案設(shè)計(jì)
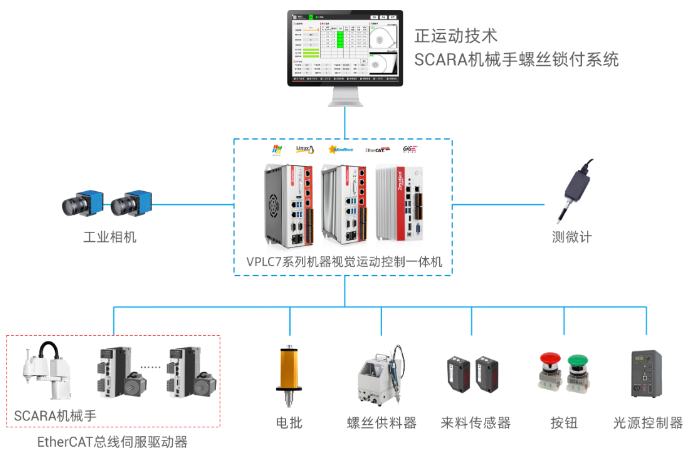
20DI:接倍數(shù)鏈工作站阻擋位、來(lái)料傳感器信號(hào),以及電批、供料器報(bào)警信號(hào);
20DO:接螺絲供料器,高速輸出口接工業(yè)相機(jī)的硬觸發(fā)輸入;
EtherCAT接口:接EtherCAT總線驅(qū)動(dòng)器,控制SCARA機(jī)械手;
4路單端脈沖輸出:接步進(jìn)/脈沖驅(qū)動(dòng)器,可控制其他附加軸;
RS232通訊接口:接電批、測(cè)微計(jì)、光源控制器;
EtherNET接口:千兆網(wǎng)口,接支持Gige協(xié)議的面陣相機(jī),實(shí)現(xiàn)視覺(jué)定位糾偏應(yīng)用。
3、運(yùn)動(dòng)控制與機(jī)器視覺(jué)實(shí)現(xiàn)過(guò)程
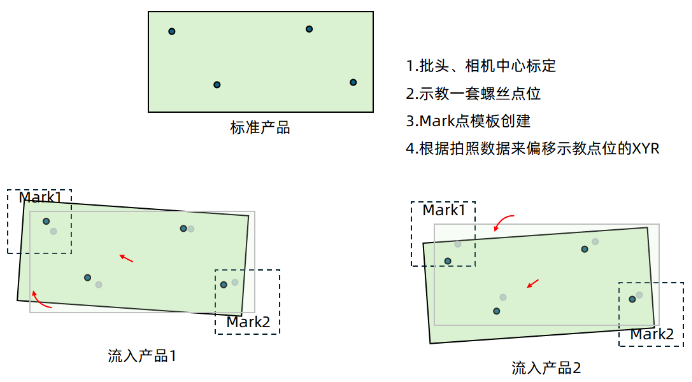
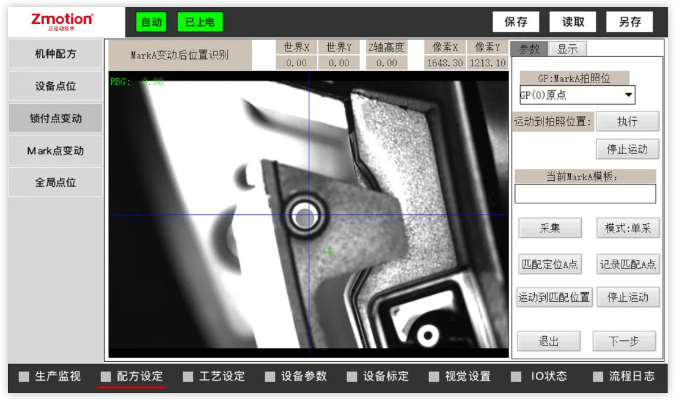
(1)機(jī)器視覺(jué)
在三軸SCARA機(jī)械手螺絲鎖付過(guò)程中,機(jī)器視覺(jué)系統(tǒng)首先獲取當(dāng)前來(lái)料產(chǎn)品的位置,隨后通過(guò)對(duì)批頭、相機(jī)中心標(biāo)定,得出標(biāo)定系數(shù),進(jìn)行雙Mark點(diǎn)定位糾偏,當(dāng)產(chǎn)品的位置和角度發(fā)生變化時(shí),可以自動(dòng)計(jì)算出糾偏螺絲鎖付工件的螺絲緊固點(diǎn)位所需的偏移量,以確保機(jī)械手能夠準(zhǔn)確移至螺絲鎖付點(diǎn)位,從而實(shí)現(xiàn)螺絲鎖付操作的精準(zhǔn)定位。
(2)運(yùn)動(dòng)控制
通過(guò)預(yù)設(shè)規(guī)劃的SCARA機(jī)械手路徑,機(jī)械手執(zhí)行拱形運(yùn)動(dòng)和點(diǎn)到點(diǎn)運(yùn)動(dòng)控制。控制系統(tǒng)會(huì)精確調(diào)整機(jī)械手臂的關(guān)節(jié)速度,確保其按照預(yù)定軌跡準(zhǔn)時(shí)到達(dá)目標(biāo)位置。
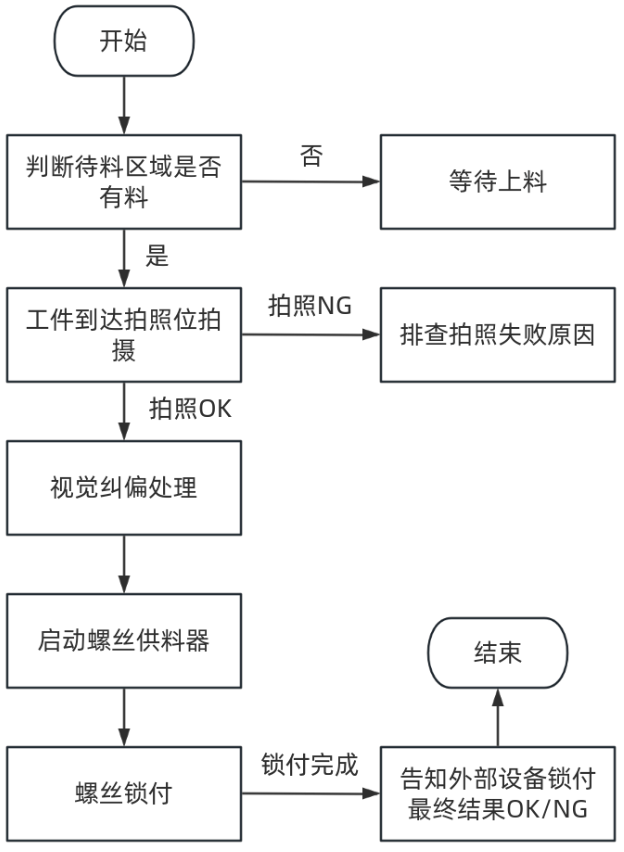
一旦產(chǎn)品到達(dá)緩存位,機(jī)械手首先檢查本工位是否有料。如無(wú)產(chǎn)品,機(jī)械手則將產(chǎn)品放行至該工位。產(chǎn)品到位后,進(jìn)行雙Mark拍照定位,并計(jì)算坐標(biāo)偏移,以便SCARA機(jī)械手能夠根據(jù)實(shí)際情況實(shí)時(shí)動(dòng)態(tài)調(diào)整目標(biāo)螺絲緊固位置,完成鎖付操作。
鎖付完成后,機(jī)械手等待下一工位的放行信號(hào)。一旦接收到放行信號(hào),機(jī)械手便控制傳送帶將產(chǎn)品送至下一工位,并再次檢查緩存位是否有料,繼續(xù)執(zhí)行上述流程。
4、SCARA機(jī)械手螺絲鎖付工藝流程
5、方案核心優(yōu)勢(shì)
集成了機(jī)器視覺(jué)、運(yùn)動(dòng)控制、IO控制和機(jī)械手控制于一體,接線更方便,成本更低;
運(yùn)動(dòng)控制實(shí)時(shí)內(nèi)核,核內(nèi)交互,指令調(diào)用速度快至us級(jí),提升加工效率;
內(nèi)置30+機(jī)械手類型算法,客戶使用更方便,提升工程師開(kāi)發(fā)效率;
提供可視化機(jī)械手螺絲鎖付軟件,程序調(diào)試工藝步驟更簡(jiǎn)單更快,鎖付過(guò)程實(shí)時(shí)監(jiān)測(cè),提供滑牙、浮高等檢測(cè),良率高達(dá)99.6%,實(shí)現(xiàn)更穩(wěn)定的“打螺絲”;
解決不同產(chǎn)品角度來(lái)料,實(shí)現(xiàn)生產(chǎn)效率與精度的大幅度提升,提高生產(chǎn)線的柔性與自動(dòng)化水平;
提供一鍵自動(dòng)標(biāo)定功能,即可快速實(shí)現(xiàn)工件鎖付位置的視覺(jué)糾偏,提高生產(chǎn)效率。
6、解決方案硬件配置

02 VPLC7系列機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)
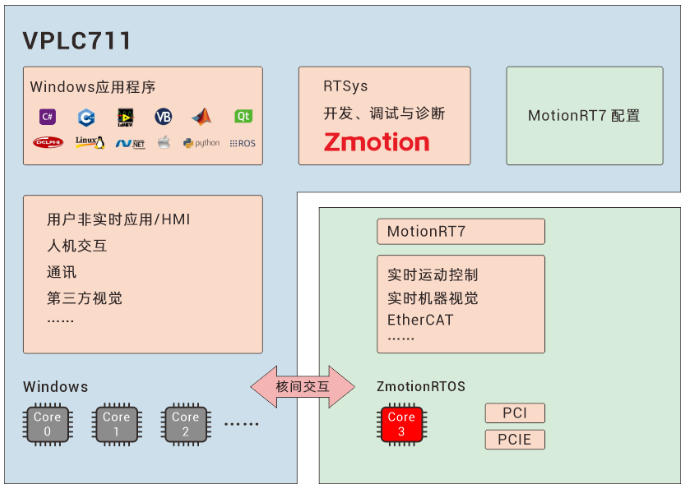
正運(yùn)動(dòng)技術(shù)VPLC7系列機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)是一款基于x86平臺(tái)和Windows操作系統(tǒng)的高性能機(jī)器視覺(jué)EtherCAT運(yùn)動(dòng)控制器,可脫機(jī)運(yùn)行,支持豐富的IO控制,30+機(jī)器人算法,以及視覺(jué)和運(yùn)動(dòng)控制功能,大幅簡(jiǎn)化視覺(jué)與運(yùn)動(dòng)控制項(xiàng)目的配置流程。
VPLC7系列機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)的安裝與拆卸過(guò)程便捷,占地空間小,還能與其它控制單元部件(如伺服驅(qū)動(dòng)器、傳感器、編碼器、控制閥等)和MES系統(tǒng)無(wú)縫集成,提供一個(gè)完整端到端的視覺(jué)運(yùn)動(dòng)控制解決方案。

可選6-64軸運(yùn)動(dòng)控制(脈沖+EtherCAT總線)
內(nèi)置實(shí)時(shí)內(nèi)核MotionRT7,支持第三方視覺(jué)軟件
板載20路通用輸入(其中10路為高速輸入),20路高速輸出
提供一體化開(kāi)放式IPC形態(tài)的實(shí)時(shí)軟控制器/軟PLC集成的視覺(jué)+運(yùn)動(dòng)控制解決方案
多核并行運(yùn)算,能夠高效處理運(yùn)動(dòng)控制,機(jī)器視覺(jué)等自動(dòng)化設(shè)備核心任務(wù)
03 提供易用的可視化RTFuse機(jī)器人系統(tǒng)平臺(tái)

RTFuse機(jī)器人系統(tǒng)是一款面向機(jī)械手市場(chǎng)推出的系統(tǒng)級(jí)軟件,支持市面上主流的Scara、Delta、六關(guān)節(jié)、協(xié)助、直角坐標(biāo)等多種機(jī)械手類型。
軟件整合了可視化的運(yùn)動(dòng)控制、IO邏輯控制、通訊交互、機(jī)器視覺(jué)等功能,用戶可在示教器上通過(guò)系統(tǒng)內(nèi)豐富的工具進(jìn)行純圖形化編程,無(wú)需編寫(xiě)代碼即可輕松實(shí)現(xiàn)中文示教一站式編程開(kāi)發(fā)。
RTFuse機(jī)器人系統(tǒng)平臺(tái)產(chǎn)品優(yōu)勢(shì)
技術(shù)門(mén)檻低
拖拽式中文組態(tài)系統(tǒng)編程,經(jīng)過(guò)簡(jiǎn)單培訓(xùn),應(yīng)用工程師可輕松上手。從上至下執(zhí)行項(xiàng)目控制流程,機(jī)械手位置手動(dòng)示教。
系統(tǒng)開(kāi)放性強(qiáng)
支持多線程控制,除機(jī)械手控制外,也可以控制其它附加軸、IO邏輯控制、通訊交互等,一個(gè)控制器即可完成。
軟硬件集成性強(qiáng)
集成EtherCAT總線、脈沖混合控制,機(jī)器視覺(jué)、運(yùn)動(dòng)控制,集軟硬于一體易于設(shè)備調(diào)試與排除問(wèn)題。
企業(yè)用人成本低
一人即可調(diào)試設(shè)備的運(yùn)動(dòng)控制、視覺(jué)、IO邏輯控制等,解決工程人員流失、用人成本高等問(wèn)題。
審核編輯 黃宇
-
運(yùn)動(dòng)控制器
+關(guān)注
關(guān)注
2文章
450瀏覽量
25282 -
機(jī)器視覺(jué)
+關(guān)注
關(guān)注
163文章
4594瀏覽量
122876 -
機(jī)械手
+關(guān)注
關(guān)注
7文章
345瀏覽量
30394 -
正運(yùn)動(dòng)技術(shù)
+關(guān)注
關(guān)注
0文章
120瀏覽量
644
發(fā)布評(píng)論請(qǐng)先 登錄
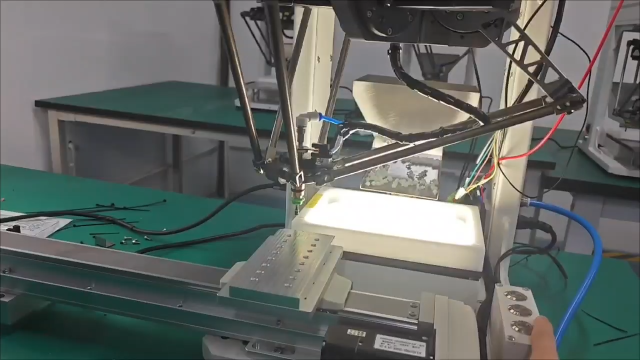
機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)在SCARA機(jī)器人柔振盤(pán)上下料的應(yīng)用

DELTA機(jī)械手多物料視覺(jué)分揀的應(yīng)用

運(yùn)動(dòng)控制模塊:Delta機(jī)械手柔性上下料開(kāi)發(fā)零門(mén)檻!

DELTA并聯(lián)機(jī)械手視覺(jué)方案榮獲2024年度機(jī)器人應(yīng)用典型案例獎(jiǎng)

DELTA并聯(lián)機(jī)械手視覺(jué)方案榮獲2024年度機(jī)器人應(yīng)用典型案例獎(jiǎng) #正運(yùn)動(dòng)技術(shù) #機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)
LabVIEW運(yùn)動(dòng)控制(一):EtherCAT運(yùn)動(dòng)控制器的SCARA機(jī)械手應(yīng)用

機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)在視覺(jué)SCARA天地蓋貼合的解決方案

高集成機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)VPLC712!

機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)在DELTA并聯(lián)機(jī)械手視覺(jué)上下料應(yīng)用

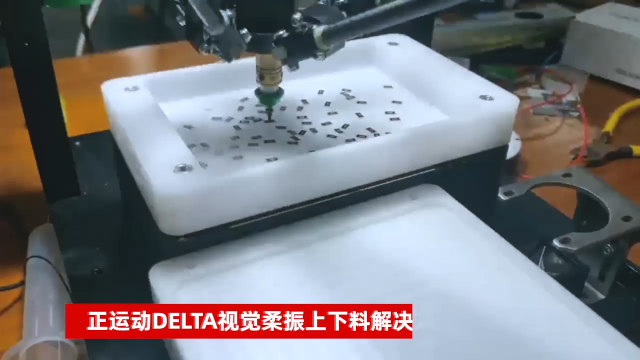
機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)在DELTA并聯(lián)機(jī)械手視覺(jué)上下料的應(yīng)用#機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)
機(jī)械手 OEM 的應(yīng)用
EtherCAT運(yùn)動(dòng)控制器在SCARA和碼垛機(jī)械手中的應(yīng)用
機(jī)器視覺(jué)運(yùn)動(dòng)控制一體機(jī)VPLC532E在汽車(chē)膠帶纏繞的開(kāi)放式CNC應(yīng)用






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論