") 室外牽引AGV:慣性測量+衛(wèi)星定位+激光雷達(dá),我全都要!
室外牽引AGV:慣性測量+衛(wèi)星定位+激光雷達(dá),我全都要!
你可曾見過室外牽引AGV在物流園區(qū)進行大批貨物的運輸,其實它也跟慣性導(dǎo)航系統(tǒng)有著千絲萬縷的關(guān)系。
我們印象里的先進AGV機器人通常采用GPS全球衛(wèi)星定位系統(tǒng)+多線激光雷達(dá)輔助定位系統(tǒng)的強強聯(lián)合,能夠?qū)崿F(xiàn)無人搬運、無人牽引等多種應(yīng)用功能。但是在近年來,慣性導(dǎo)航技術(shù)也逐漸出現(xiàn)在了AGV應(yīng)用領(lǐng)域里。
這是因為相比于衛(wèi)星定位導(dǎo)航系統(tǒng)和激光雷達(dá)定位系統(tǒng),慣性導(dǎo)航擁有獨特的優(yōu)勢。

首先慣性導(dǎo)航能夠提供比較多的導(dǎo)航參數(shù),還能夠提供全姿態(tài)信息參數(shù),這是其他導(dǎo)航系統(tǒng)所不能比擬的。這是因為慣性導(dǎo)航系統(tǒng)不是靠外部的定位或參照,而是依靠自身的慣導(dǎo)IMU?即慣性測量單元來測量其三軸姿態(tài)角(?或角速率)?以及加速度。IMU內(nèi)部通常由三軸加速度計和三軸陀螺儀組成,?加速度計用于檢測物體在載體坐標(biāo)系統(tǒng)中獨立三軸的加速度信號,?而陀螺儀則檢測載體相對于導(dǎo)航坐標(biāo)系的角速度信號。?通過對這些信號進行處理,就?可以解算出物體的姿態(tài)。
其次,慣性導(dǎo)航系統(tǒng)不受外界干擾,這也是由其原理決定的。通過上文我們知道慣性導(dǎo)航不靠外界提供定位,而是靠自身的慣性測量單元和計算機來測算自己的物理態(tài),并以此確定自己的位置、姿態(tài)等信息。既然一切靠自己,那自然就“不求人”了,不用擔(dān)心信號不好甚至沒有信號的情況。

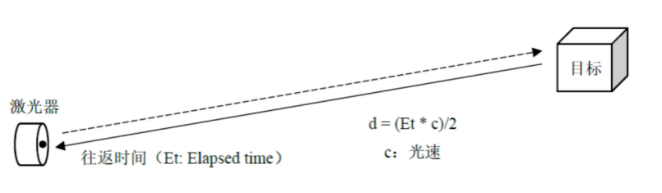
當(dāng)然慣性導(dǎo)航也存在缺點,因其定位是靠自身測算出來的,那就難免存在誤差,而且隨著時間積累會越發(fā)明顯。所以,需要由其他導(dǎo)航系統(tǒng)組合補充和修正,現(xiàn)代組合導(dǎo)航系統(tǒng)大多數(shù)是衛(wèi)星導(dǎo)航和慣性導(dǎo)航的組合。而在室外AGV機器人/牽引車的使用上,可以根據(jù)情況選擇搭配激光雷達(dá)輔助定位系統(tǒng)或衛(wèi)星定位系統(tǒng),以此讓組合導(dǎo)航系統(tǒng)同時具備多種導(dǎo)航的優(yōu)點,提高導(dǎo)航系統(tǒng)的精度和可靠性。
正如我們現(xiàn)在在物流園區(qū)應(yīng)用的組合導(dǎo)航系統(tǒng)室外牽引式AGV,采用慣性導(dǎo)航與激光環(huán)境導(dǎo)航技術(shù)相結(jié)合,通過IVS508慣性測量單元實時測量,搭配測量式激光,實現(xiàn)非標(biāo)環(huán)境下的可靠導(dǎo)航,大大拓展了AGV可應(yīng)用環(huán)境并且能夠?qū)崿F(xiàn)室外全天候、高頻率運行,得到了廣大用戶的良好反饋。
審核編輯 黃宇
-
衛(wèi)星定位
+關(guān)注
關(guān)注
6文章
99瀏覽量
18190 -
慣性測量
+關(guān)注
關(guān)注
0文章
13瀏覽量
8562 -
AGV
+關(guān)注
關(guān)注
27文章
1431瀏覽量
42016 -
激光雷達(dá)
+關(guān)注
關(guān)注
971文章
4196瀏覽量
191998
發(fā)布評論請先 登錄
一種新型激光雷達(dá)慣性視覺里程計系統(tǒng)介紹

DeepSeek:2025年激光雷達(dá)技術(shù)與行業(yè)應(yīng)用趨勢

激光雷達(dá)進化史:從機械式到全固態(tài)
一則消息引爆激光雷達(dá)行業(yè)!特斯拉竟然在自研激光雷達(dá)?
激光雷達(dá)的維護與故障排查技巧
激光雷達(dá)技術(shù)的基于深度學(xué)習(xí)的進步
如何提升激光雷達(dá)數(shù)據(jù)的精度
激光雷達(dá)技術(shù)的發(fā)展趨勢
光學(xué)雷達(dá)和激光雷達(dá)的區(qū)別是什么
激光雷達(dá)點云數(shù)據(jù)包含哪些信息

激光雷達(dá)與毫米波雷達(dá)的優(yōu)缺點是什么
AGV慣導(dǎo)應(yīng)用之無人牽引車慣性測量單元IMU


AGV智能小車自動避障繞行#AGV #智能小車 #搬運機器人 #激光雷達(dá) #SLAM導(dǎo)航
愛普生IMU產(chǎn)品在激光雷達(dá)測繪中的應(yīng)用






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論