") 遠程IO:EtherCAT總線耦合器,在Codesys和Twincat軟件里組態(tài)案例
遠程IO:EtherCAT總線耦合器,在Codesys和Twincat軟件里組態(tài)案例


EtherCAT總線耦合器作為網(wǎng)絡接口,連接主控制器(如PLC)和其他EtherCAT設備,實現(xiàn)實時、高效的數(shù)據(jù)交換。它能夠支持工業(yè)自動化系統(tǒng)中的監(jiān)控和控制功能,確保數(shù)據(jù)的準確性和實時性。
 遠程IO:EtherCAT總線耦合器
遠程IO:EtherCAT總線耦合器
一、在歐姆龍Sysmac Studio軟件中配置EtherCAT總線耦合器的步驟通常涉及多個環(huán)節(jié),以下是操作步驟:
 遠程IO:EtherCAT總線耦合器
遠程IO:EtherCAT總線耦合器
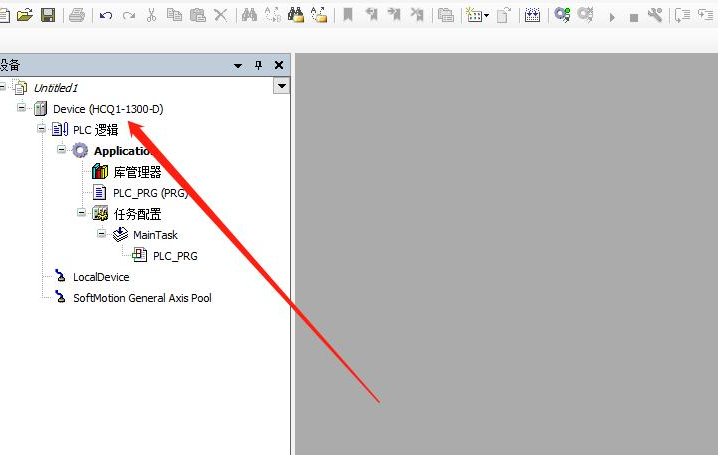
1、新建PLC項目
 遠程IO:EtherCAT總線耦合器
遠程IO:EtherCAT總線耦合器
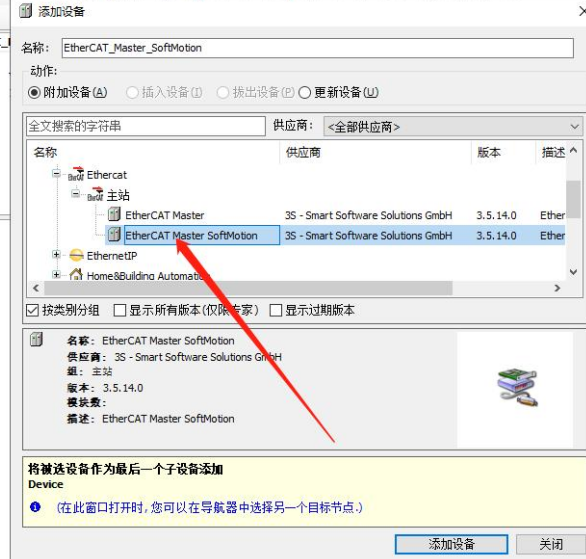
2、右鍵Deviec添加現(xiàn)場總線主站
 遠程IO:EtherCAT總線耦合器
遠程IO:EtherCAT總線耦合器
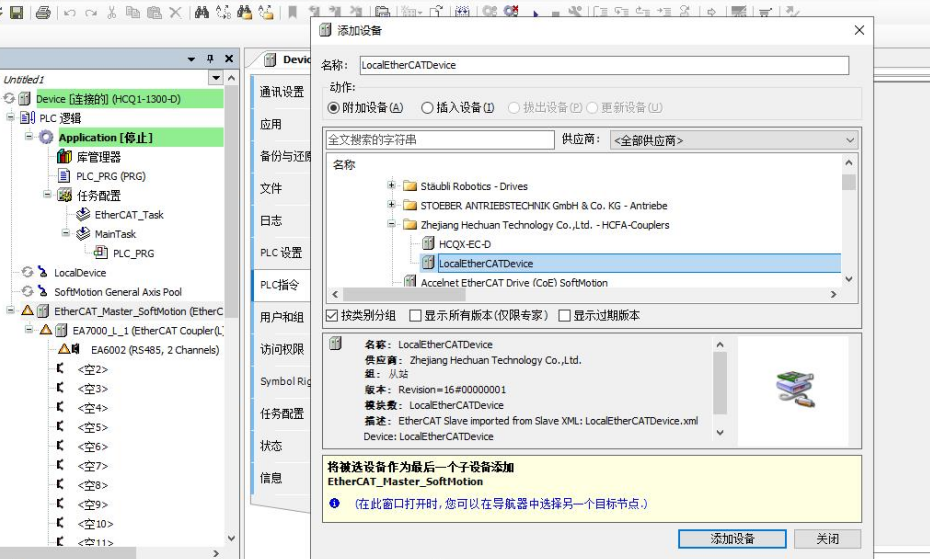
3.添加localethercatDive
 遠程IO:EtherCAT總線耦合器
遠程IO:EtherCAT總線耦合器
4、工具-設備存儲庫-安裝-xml文件
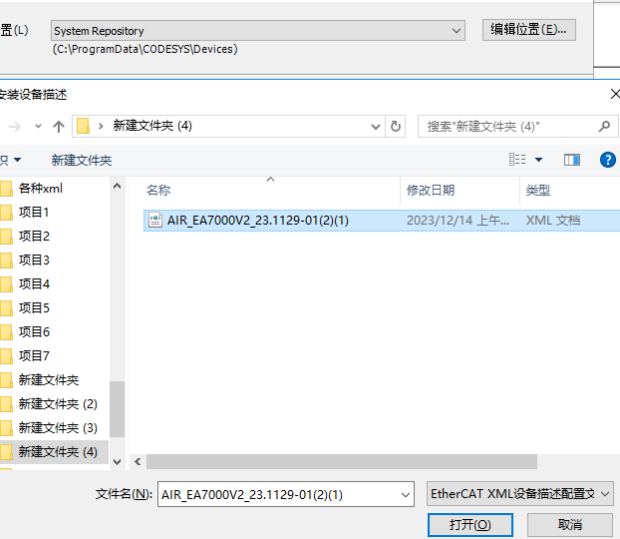 遠程IO:EtherCAT總線耦合器
遠程IO:EtherCAT總線耦合器
5.添加成功
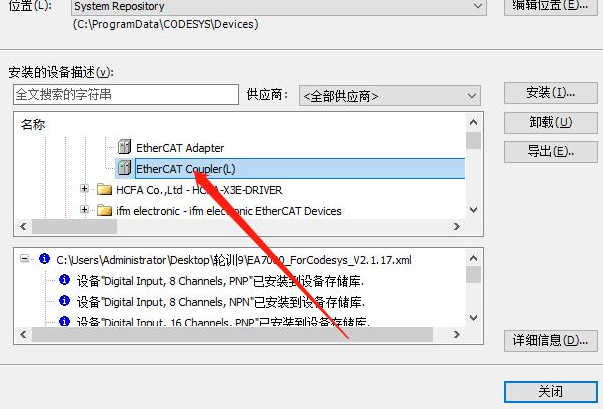 遠程IO:EtherCAT總線耦合器
遠程IO:EtherCAT總線耦合器
6.添加從站:右鍵點擊ethercat主站-添加設備
 遠程IO:EtherCAT總線耦合器
遠程IO:EtherCAT總線耦合器
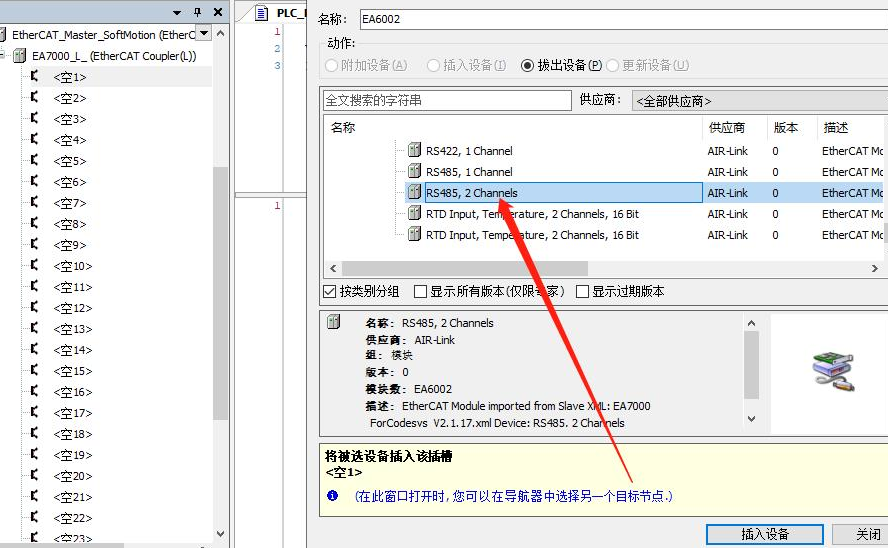
7.右鍵空1-插入設備找到配置的IO
遠程IO:EtherCAT總線耦合器
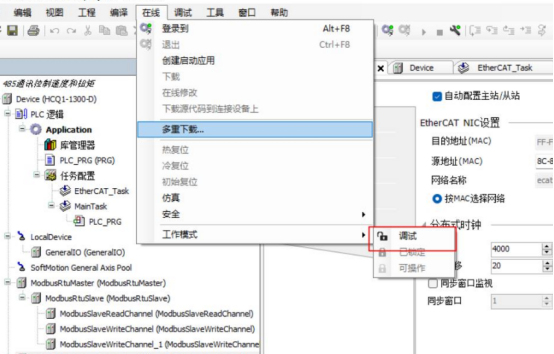
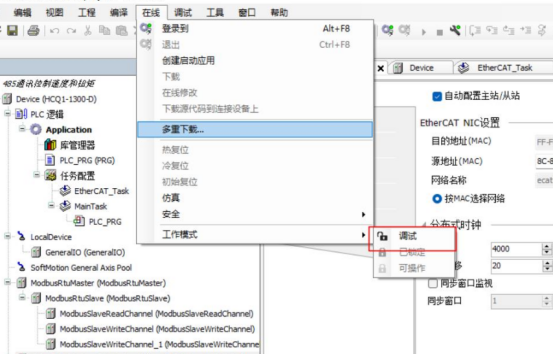
8.登錄-啟動
9、完成配置
 遠程IO:EtherCAT總線耦合器
遠程IO:EtherCAT總線耦合器
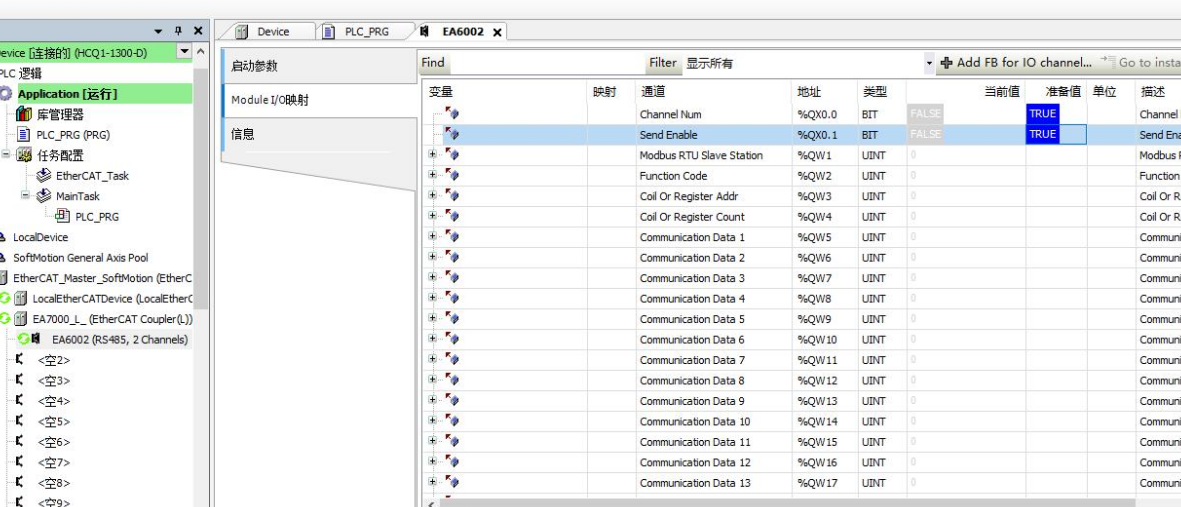
10、配置參數(shù)方法
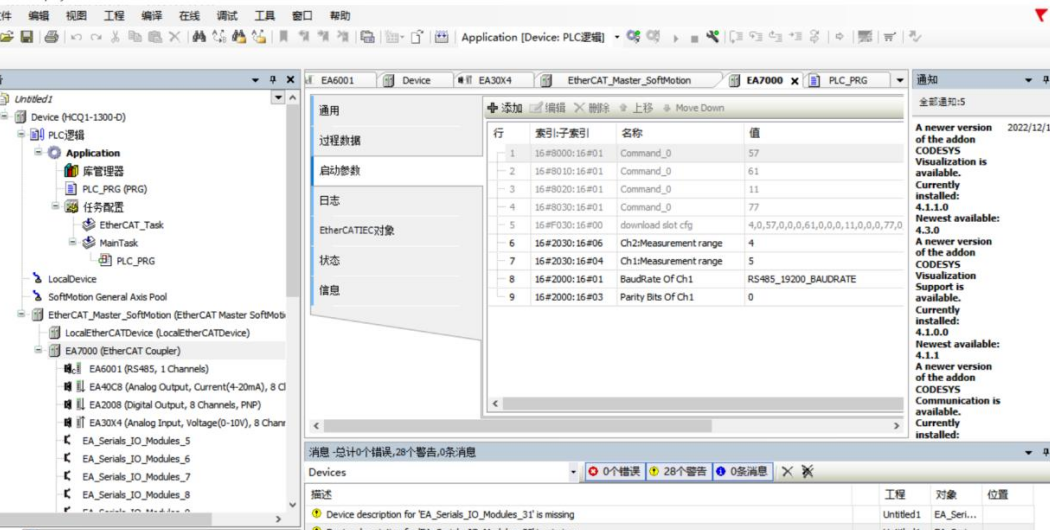 遠程IO:EtherCAT總線耦合器
遠程IO:EtherCAT總線耦合器 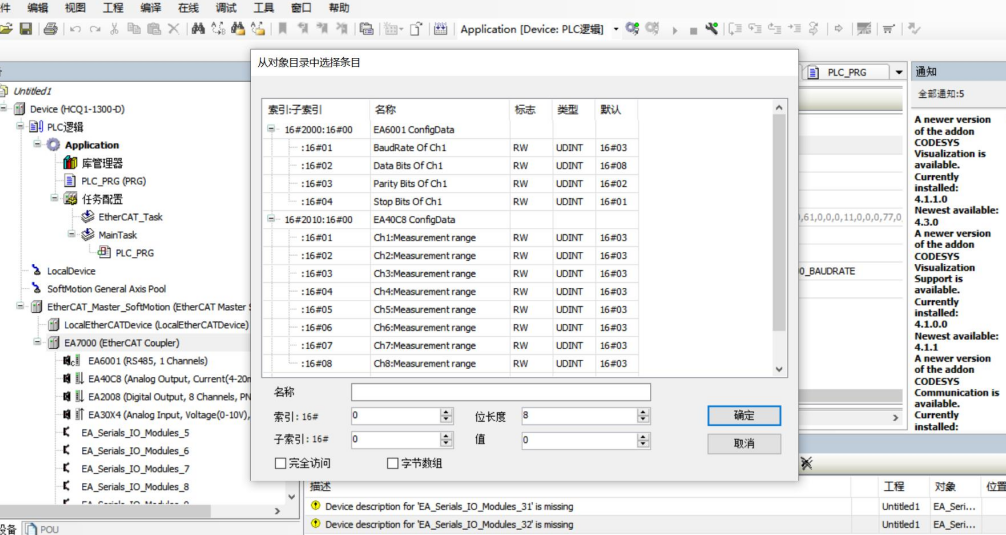 遠程IO:EtherCAT總線耦合器
遠程IO:EtherCAT總線耦合器
問題1:不能登錄
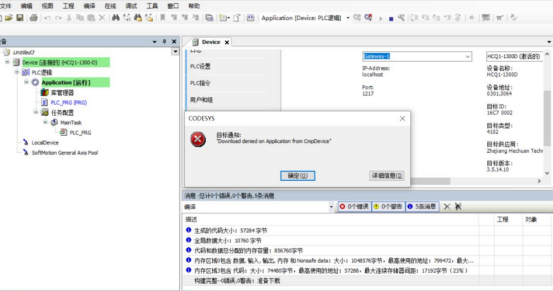
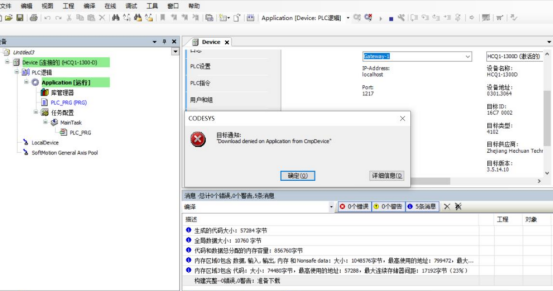
解決方法
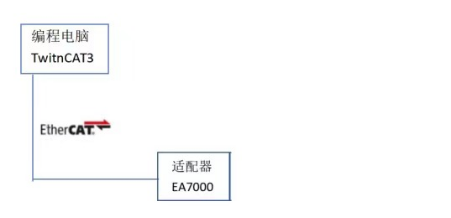
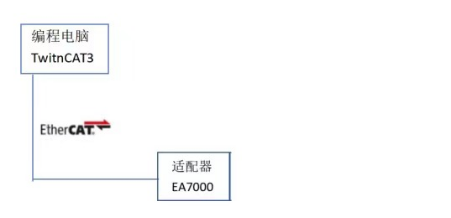
二、Twincat組態(tài)
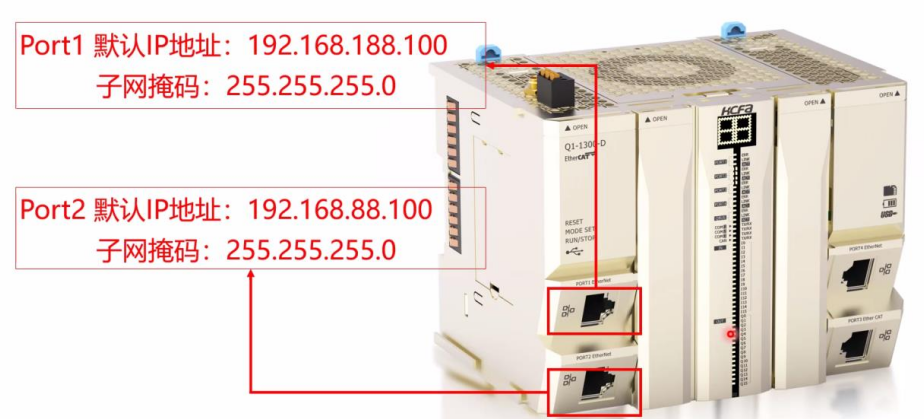
1.通信連接圖
2、硬件配置


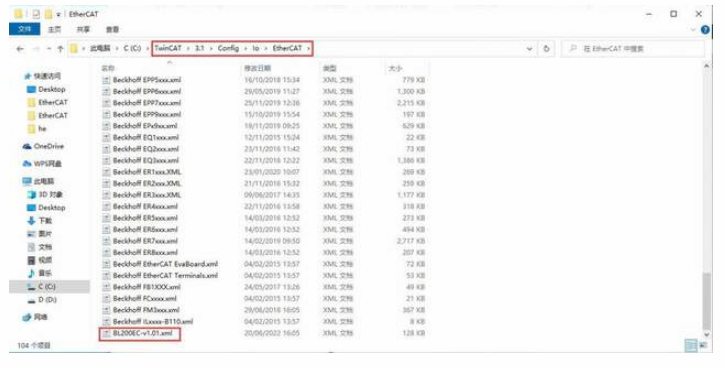
3、安裝XML描述文件
安裝XML描述文件到TwinCAT3中。示例默認文件夾為
(C:TwinCAT3.1ConfigIoEtherCAT)


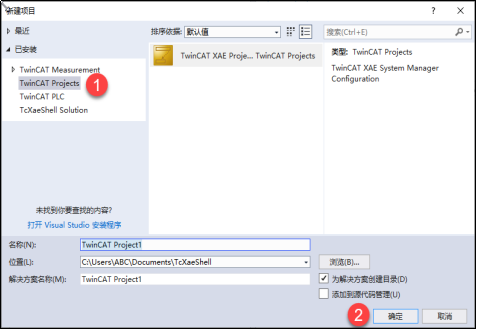
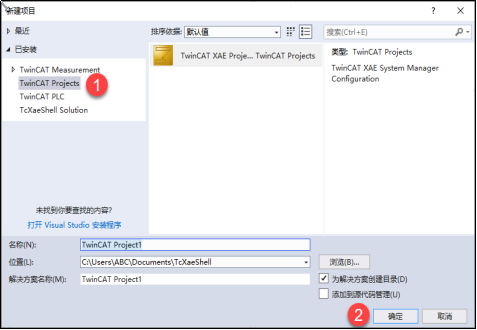
4、新建工程與設備組態(tài)
打開TwinCAT3軟件,菜單欄中選擇“文件”>新建>項目,如圖4-3所示,在新建項目窗口中選擇“TwinCATprojects”。

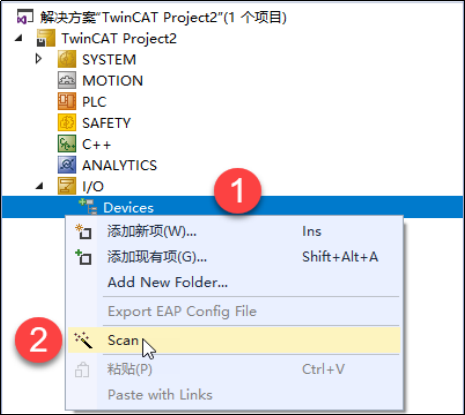
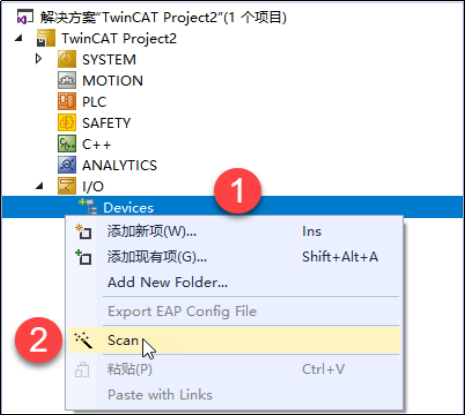
5.將于編程電腦連接的IO掃描到工程中,項目樹中點擊“I/O”>“Devices”>“Scan”,如圖4-5所示,掃描上來的硬件組態(tài)。
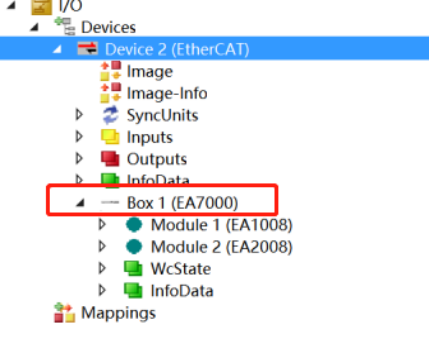
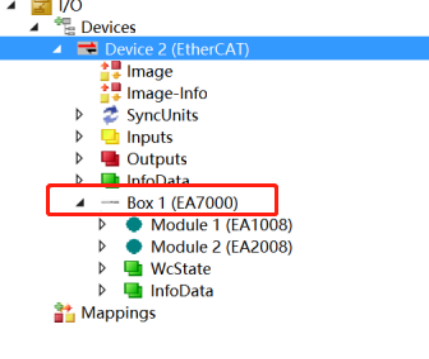
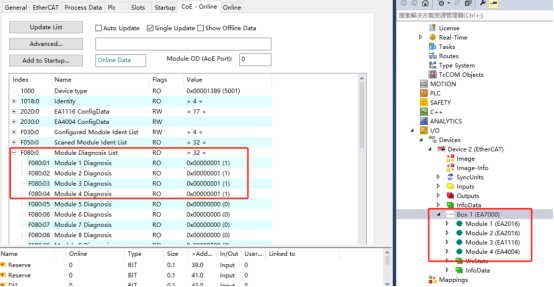
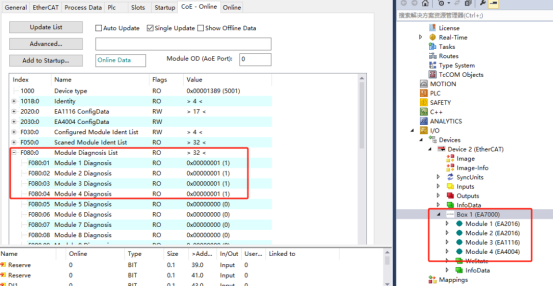
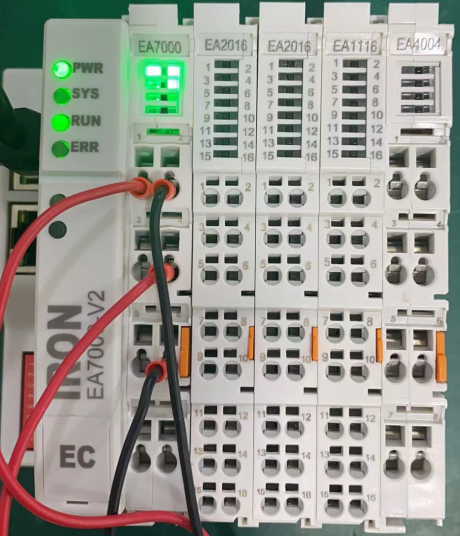
三、以下展示了組態(tài)XD7000搭配2016+2016+1116+XD4004模塊下,正常和異常的兩種狀況
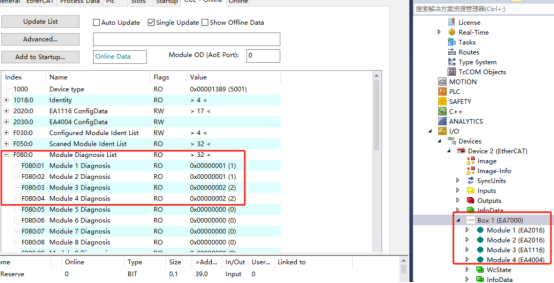
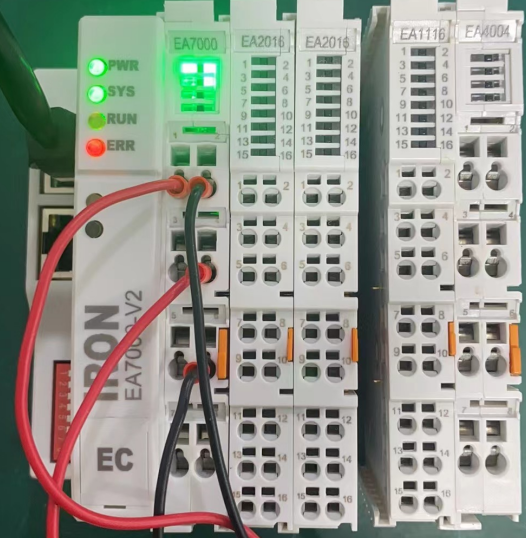
組態(tài)正常
1、TwinCAT配置里無告警信息,顯示數(shù)字為1,且XD7000耦合器SYS燈約1s閃爍一次,Run燈常亮。步驟如下
組態(tài)異常
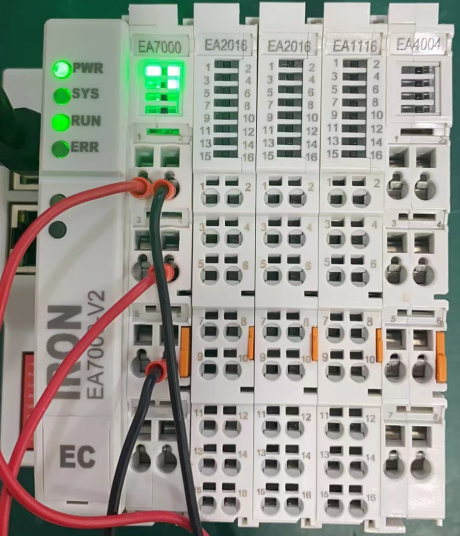
2、取走XD1116和XD4004模塊,TwinCAT里滾動鼠標刷新下會顯示報警信息,數(shù)字為2,且XD7000耦合器SYS燈會持續(xù)閃爍,ERR會報紅燈
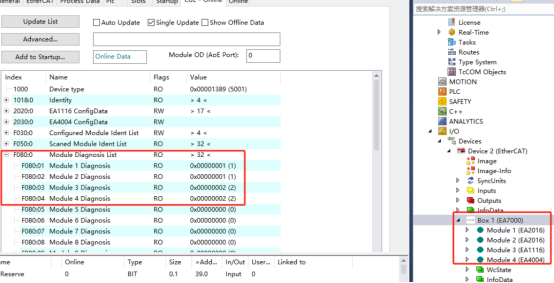
XD7000組態(tài)異常
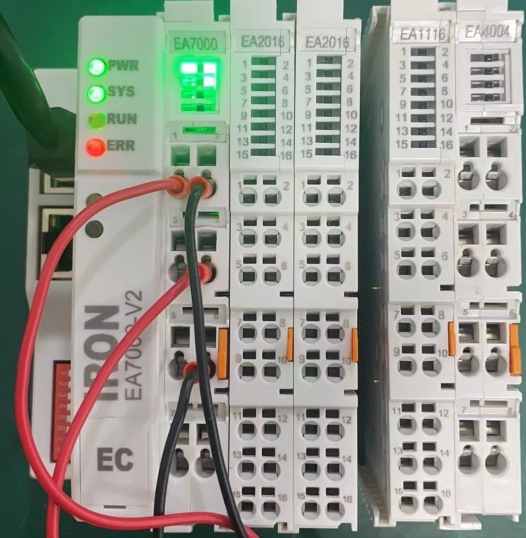
注:TwinCAT里數(shù)字1代表正常,數(shù)字2代表報警信息屬異常狀況。
通過EtherCAT總線耦合器通過高效連接實現(xiàn)了不同機器人或自動化設備之間的高速通信。其通過自動檢測和確定不同的設備連接方式,實現(xiàn)快速、直接和無縫連接,并保證高速數(shù)據(jù)傳輸。在應用領域具有廣泛的適應性,安裝簡單,集成應用后可節(jié)省不少安裝和設計成本。為機器人生產(chǎn)企業(yè)和自動化設備行業(yè)提供了可靠的技術支持。
審核編輯 黃宇
-
總線
+關注
關注
10文章
2958瀏覽量
89574 -
耦合器
+關注
關注
8文章
735瀏覽量
60890 -
ethercat
+關注
關注
19文章
1084瀏覽量
39860 -
CoDeSys
+關注
關注
11文章
41瀏覽量
19007 -
遠程io
+關注
關注
0文章
89瀏覽量
2032
發(fā)布評論請先 登錄
Profinet遠程IO模塊:數(shù)字量輸入模塊_遠程組態(tài)說明

資料下載:在CODESYS中通過EtherCAT總線驅(qū)動單個電機
在CODESYS中怎樣通過EtherCAT總線去驅(qū)動單個電機呢
歐姆龍耦合器通過EtherCAT轉(zhuǎn)profinet網(wǎng)關與西門子PLC1200連接
IO耦合器如何通過CANopen總線進行通訊
CANopen遠程IO耦合器可有效擴展自動化控制范圍
ethercat總線上的IO耦合器
CANopen IO耦合器功能的實現(xiàn)
Ether CAT分布式IO如何與TwinCAT 3通訊
總線IO耦合器怎么用?
總線IO耦合器和PLC有什么類似的地方?
插片式遠程IO模塊:Profinet總線耦合器在STEP7配置

插片式遠程 IO模塊:Profinet總線耦合器在SIMATIC Manager配置

EtherCAT總線耦合器:在歐姆龍SysmacStudio軟件里的配置步驟

EtherCAT總線IO模塊功能及安裝介紹






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論