") YOLOv5的原理、結(jié)構(gòu)、特點(diǎn)和應(yīng)用
YOLOv5的原理、結(jié)構(gòu)、特點(diǎn)和應(yīng)用
YOLOv5(You Only Look Once version 5)是一種基于深度學(xué)習(xí)的實(shí)時(shí)目標(biāo)檢測(cè)算法,它屬于卷積神經(jīng)網(wǎng)絡(luò)(CNN)的范疇。下面我將詳細(xì)介紹YOLOv5的原理、結(jié)構(gòu)、特點(diǎn)和應(yīng)用。
- 引言
目標(biāo)檢測(cè)是計(jì)算機(jī)視覺(jué)領(lǐng)域的一個(gè)重要問(wèn)題,它旨在識(shí)別圖像中的目標(biāo)并確定它們的位置。傳統(tǒng)的目標(biāo)檢測(cè)方法如HOG+SVM、R-CNN等存在計(jì)算復(fù)雜度高、檢測(cè)速度慢等問(wèn)題。隨著深度學(xué)習(xí)技術(shù)的發(fā)展,基于CNN的目標(biāo)檢測(cè)算法逐漸成為主流,其中YOLO系列算法以其速度快、性能好而受到廣泛關(guān)注。
- YOLOv5的原理
YOLOv5是一種單階段目標(biāo)檢測(cè)算法,它將目標(biāo)檢測(cè)任務(wù)視為一個(gè)回歸問(wèn)題,直接從圖像中預(yù)測(cè)目標(biāo)的類(lèi)別和位置。YOLOv5的核心思想是將圖像劃分為多個(gè)網(wǎng)格,每個(gè)網(wǎng)格負(fù)責(zé)預(yù)測(cè)該網(wǎng)格內(nèi)的目標(biāo)。
YOLOv5的網(wǎng)絡(luò)結(jié)構(gòu)包括三個(gè)主要部分:主干網(wǎng)絡(luò)、特征金字塔網(wǎng)絡(luò)(FPN)和預(yù)測(cè)層。主干網(wǎng)絡(luò)用于提取圖像的特征,F(xiàn)PN用于融合不同尺度的特征,預(yù)測(cè)層用于生成最終的目標(biāo)檢測(cè)結(jié)果。
- YOLOv5的結(jié)構(gòu)
YOLOv5的網(wǎng)絡(luò)結(jié)構(gòu)如下:
- 主干網(wǎng)絡(luò):YOLOv5采用了CSPDarknet53作為主干網(wǎng)絡(luò),該網(wǎng)絡(luò)具有53個(gè)卷積層,可以有效地提取圖像的特征。
- 特征金字塔網(wǎng)絡(luò)(FPN):YOLOv5采用了PANet結(jié)構(gòu)的FPN,通過(guò)自頂向下的路徑和橫向連接,實(shí)現(xiàn)了多尺度特征的融合。
- 預(yù)測(cè)層:YOLOv5采用了錨框(anchor box)技術(shù),每個(gè)網(wǎng)格預(yù)測(cè)多個(gè)錨框的類(lèi)別和位置。預(yù)測(cè)層包括三個(gè)尺度的預(yù)測(cè),分別對(duì)應(yīng)不同大小的目標(biāo)。
- YOLOv5的特點(diǎn)
- 速度快:YOLOv5采用了單階段檢測(cè)方法,避免了復(fù)雜的候選區(qū)域提取和后處理步驟,使得檢測(cè)速度非常快。
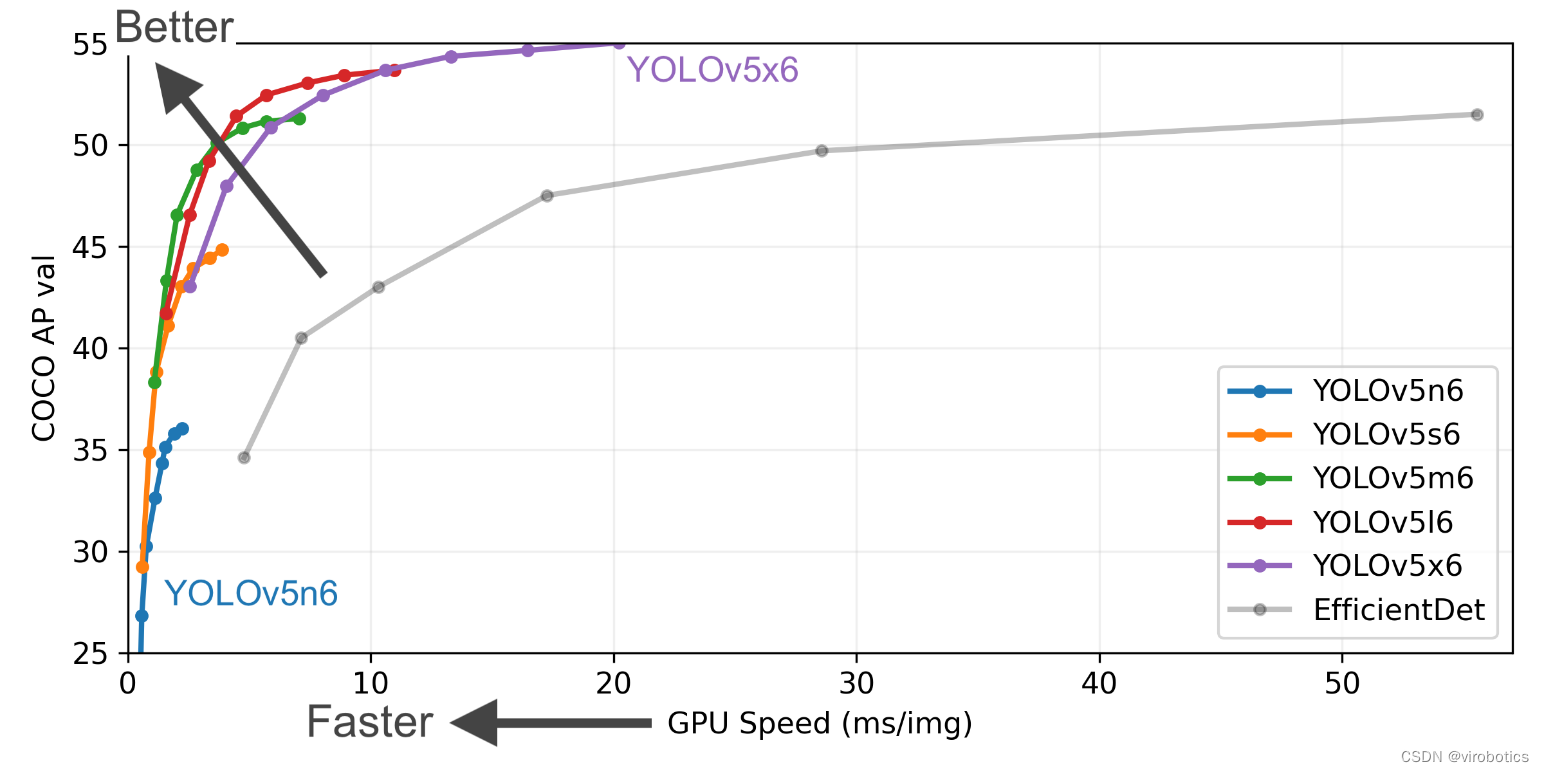
- 性能好:YOLOv5在多個(gè)公開(kāi)數(shù)據(jù)集上取得了優(yōu)異的性能,與Faster R-CNN等雙階段檢測(cè)算法相比,具有更高的精度和速度。
- 易于部署:YOLOv5的網(wǎng)絡(luò)結(jié)構(gòu)簡(jiǎn)單,易于在各種設(shè)備上部署,包括嵌入式設(shè)備和移動(dòng)設(shè)備。
- YOLOv5的應(yīng)用
YOLOv5廣泛應(yīng)用于各種場(chǎng)景,包括:
- 視頻監(jiān)控:YOLOv5可以實(shí)時(shí)檢測(cè)視頻中的人、車(chē)等目標(biāo),用于安全監(jiān)控和行為分析。
- 自動(dòng)駕駛:YOLOv5可以檢測(cè)道路上的車(chē)輛、行人等目標(biāo),為自動(dòng)駕駛系統(tǒng)提供關(guān)鍵信息。
- 醫(yī)學(xué)圖像分析:YOLOv5可以檢測(cè)醫(yī)學(xué)圖像中的病變區(qū)域,輔助醫(yī)生進(jìn)行診斷。
- 工業(yè)自動(dòng)化:YOLOv5可以檢測(cè)生產(chǎn)線上的缺陷和異常,提高生產(chǎn)效率和質(zhì)量。
- YOLOv5的改進(jìn)
YOLOv5在YOLOv4的基礎(chǔ)上進(jìn)行了多項(xiàng)改進(jìn),包括:
- 更高效的主干網(wǎng)絡(luò):YOLOv5采用了CSPDarknet53作為主干網(wǎng)絡(luò),相比YOLOv4的CSPDarknet53,具有更高的計(jì)算效率。
- 更強(qiáng)大的特征融合:YOLOv5采用了PANet結(jié)構(gòu)的FPN,相比YOLOv4的FPN,具有更強(qiáng)的特征融合能力。
- 更準(zhǔn)確的錨框預(yù)測(cè):YOLOv5采用了更先進(jìn)的錨框預(yù)測(cè)方法,提高了預(yù)測(cè)的準(zhǔn)確性。
- YOLOv5的局限性
盡管YOLOv5具有很多優(yōu)點(diǎn),但也存在一些局限性:
- 對(duì)小目標(biāo)的檢測(cè)能力有限:由于YOLOv5的錨框大小固定,對(duì)于小目標(biāo)的檢測(cè)能力有限。
- 對(duì)遮擋目標(biāo)的檢測(cè)能力有限:當(dāng)目標(biāo)被遮擋時(shí),YOLOv5可能無(wú)法準(zhǔn)確檢測(cè)到目標(biāo)。
- 對(duì)復(fù)雜場(chǎng)景的魯棒性有限:在復(fù)雜場(chǎng)景下,YOLOv5可能會(huì)出現(xiàn)誤檢和漏檢的情況。
- 結(jié)論
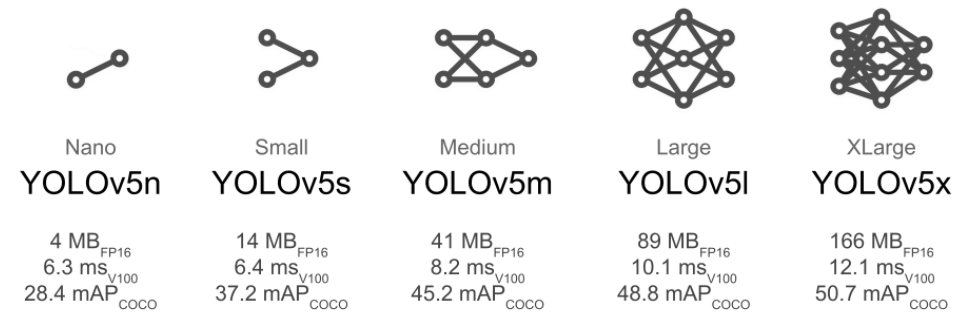
YOLOv5是一種優(yōu)秀的實(shí)時(shí)目標(biāo)檢測(cè)算法,具有速度快、性能好、易于部署等特點(diǎn)。它在多個(gè)領(lǐng)域得到了廣泛的應(yīng)用,為計(jì)算機(jī)視覺(jué)的發(fā)展做出了重要貢獻(xiàn)。
-
嵌入式設(shè)備
+關(guān)注
關(guān)注
0文章
115瀏覽量
17344 -
計(jì)算機(jī)視覺(jué)
+關(guān)注
關(guān)注
9文章
1706瀏覽量
46569 -
深度學(xué)習(xí)
+關(guān)注
關(guān)注
73文章
5554瀏覽量
122477 -
卷積神經(jīng)網(wǎng)絡(luò)
+關(guān)注
關(guān)注
4文章
369瀏覽量
12191
發(fā)布評(píng)論請(qǐng)先 登錄
【YOLOv5】LabVIEW+YOLOv5快速實(shí)現(xiàn)實(shí)時(shí)物體識(shí)別(Object Detection)含源碼
Yolov5算法解讀
【YOLOv5】LabVIEW+TensorRT的yolov5部署實(shí)戰(zhàn)(含源碼)
龍哥手把手教你學(xué)視覺(jué)-深度學(xué)習(xí)YOLOV5篇
怎樣使用PyTorch Hub去加載YOLOv5模型
YOLOv5網(wǎng)絡(luò)結(jié)構(gòu)解析
如何YOLOv5測(cè)試代碼?
yolov5模型onnx轉(zhuǎn)bmodel無(wú)法識(shí)別出結(jié)果如何解決?
基于YOLOv5的目標(biāo)檢測(cè)文檔進(jìn)行的時(shí)候出錯(cuò)如何解決?
YOLOv5 7.0版本下載與運(yùn)行測(cè)試
在C++中使用OpenVINO工具包部署YOLOv5模型
使用旭日X3派的BPU部署Yolov5

淺析基于改進(jìn)YOLOv5的輸電線路走廊滑坡災(zāi)害識(shí)別

yolov5和YOLOX正負(fù)樣本分配策略

YOLOv5網(wǎng)絡(luò)結(jié)構(gòu)訓(xùn)練策略詳解





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論