 KUKA電伺服焊鉗測量原理分析
KUKA電伺服焊鉗測量原理分析
user測量程序:
Geometrie:
初始化
在以下情況下必須完成:
?啟動時
?每次更換電極后
使用在WorkVisual下的初始化力新上限下配置的力。
nachFraesen:
循環初始化
?循環初始化必須在瓶蓋銑削之后進行,使用在WorkVisual中在初始化力蓋下配置的力。

焊鉗測量USER程序:
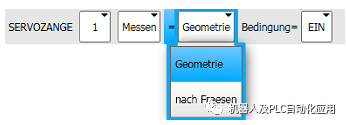
P1 =選擇鉗子(鉗子編號)
P2 =技術選擇(測量)
P3 =方法-幾何/銑削后
P4 =條件-執行命令的條件
例如:
SERVOZANGE 1 Messen= nach Fraesen Bedingung=EIN 測量
VW_SGB_INIT_ADV(TRUE,#SG_PTP,P8,1,#SAME)
VW_SGB_INIT_MAIN(TRUE,#SG_PTP,P8,1,#SAME)
VW_SGB_INIT_MAIN(Condition:IN, MovementType :IN, PointCoord :IN,GunNumber :IN,InitType :IN)
Condition:TRUE條件
MovementType:SG_PTP運動類型
PointCoord:P8 工作點號
GunNumber:1 槍號
InitType: #SAME/#NEW 測量類型:#SAME銑削后測量,#NEW更換電極測量

1.SGL_CalcWear 測量損耗
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
伺服
+關注
關注
16文章
664瀏覽量
41625 -
測量
+關注
關注
10文章
5176瀏覽量
112948 -
KUKA
+關注
關注
3文章
218瀏覽量
16901
原文標題:KUKA電伺服焊鉗測量原理分析
文章出處:【微信號:gh_a8b121171b08,微信公眾號:機器人及PLC自動化應用】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
熱點推薦
伺服電機測試流程分析
伺服電機的測試流程是確保電機正常工作的關鍵步驟。以下是對伺服電機測試流程的詳細分析。 ?一、初步檢查與準備 1. 外觀檢查:首先,對伺服電機進行外觀檢查,確保電機完好無損,沒有明顯的物
庫卡KUKA機器人常見故障維修
1、KUKA機器人伺服電機維修過熱原因 ①電源電壓過高; ②電源電壓過低,電機在額定負載下運行,電流過大使線圈發熱; ①修理和拆卸線圈時,熱拆卸方法不正確,會燒壞鐵芯; ①發動機過載或頻繁啟動
是德頻譜分析儀的振動對測量的干擾
干擾,降低測量精度,甚至導致測量失效。因此,深入研究振動對 是德科技頻譜分析儀 的影響,并探索有效的抑制策略至關重要。 振動干擾的機理分析: 振動干擾對頻譜

其利天下技術·引起伺服電機故障的原因分析·伺服電機驅動方案開發
伺服電機都有它的壽命,當使用到一定程度的時候,可能會出現各類型的故障。我們今天來分析一下可能引起伺服電機故障的原因,以及解決辦法。編碼器報警1.編碼器信號問題原因分析:連接問題:編碼器

陸地移動無線電調制分析儀的技術原理和應用場景
陸地移動無線電調制分析儀是一種專用于陸地移動無線電(LMR)系統的高性能測試設備,其技術原理和應用場景如下:技術原理陸地移動無線電調制分析儀
發表于 11-05 14:28
電渦流位移傳感器的測量原理是什么
電渦流位移傳感器是一種利用電磁感應原理測量物體位移的傳感器。它具有高精度、高穩定性、抗干擾能力強等優點,廣泛應用于工業自動化、精密測量等領域。 一、電渦流位移傳感器的
交流伺服電機與直流伺服電機的對比分析
伺服電機作為現代工業自動化領域的核心動力元件,廣泛應用于各種高精度、高效率的運動控制系統中。其中,交流伺服電機和直流伺服電機作為兩種主要的伺服電機類型,各有其獨特的工作原理、性能特點和
伺服壓力機的優缺點分析
伺服壓力機是一種利用伺服電機驅動的精密壓力機,廣泛應用于金屬成型、沖壓、拉伸、折彎等工藝。 伺服壓力機的優點: 高效率: 伺服電機的響應速度快,可以實現快速的加減速,從而提高生產效率。
伺服壓裝機原理及結構分析
伺服壓裝機是一種廣泛應用于工業生產中的自動化設備,主要用于實現對工件的精確壓裝。其工作原理是通過伺服電機驅動,實現對壓裝力的精確控制,從而保證壓裝質量。 一、伺服壓裝機的工作原理 伺服
伺服驅動器不上電是什么原因
的故障,導致設備無法正常工作。本文將從多個角度分析伺服驅動器不上電的原因,并提供相應的解決方案。 電源問題 伺服驅動器的電源問題是最常見的原因之一。電源問題主要包括以下幾個方面: 1.
伺服電子變壓器輸出電壓怎么測量
伺服電子變壓器是一種特殊的變壓器,主要用于伺服電機的驅動和控制。它具有高效率、高穩定性、高響應速度等特點,廣泛應用于工業自動化、機器人、數控機床等領域。本文將詳細介紹伺服電子變壓器輸出電壓的測





 工商網監
工商網監
評論