") 如何實現(xiàn)兩臺伺服電機比例同步運行
如何實現(xiàn)兩臺伺服電機比例同步運行
在工業(yè)自動化和機器人技術中,伺服電機因其高精度、高響應速度的特性而得到廣泛應用。在某些應用場景中,需要兩臺或多臺伺服電機以一定的比例同步運行,以滿足特定的工藝或控制需求。本文將詳細探討如何實現(xiàn)兩臺伺服電機的比例同步運行,內容將涵蓋硬件連接、參數(shù)設置、程序設計以及調試與優(yōu)化等方面,以期為工程師和技術人員提供有價值的參考。
一、硬件連接
主從控制連接:
在主從控制模式下,一臺伺服電機作為主電機,另一臺作為從電機。主電機接收來自控制器的指令,并通過編碼器反饋自身的位置和速度信息。從電機則根據主電機的位置和速度信息,通過伺服驅動器實現(xiàn)與主電機的同步運行。
硬件連接時,需要確保主伺服驅動器和從伺服驅動器之間的通信接口連接正確,一般采用差分電路輸出A/B相脈沖信號給到從伺服驅動器。同時,從伺服驅動器還需要接收主伺服驅動器的編碼器反饋信號,以實現(xiàn)精確的同步控制。
編碼器反饋系統(tǒng):
為了實現(xiàn)高精度的同步控制,需要采用高精度的編碼器來反饋伺服電機的位置和速度信息。編碼器可以直接產生數(shù)字信號,使得伺服電機可以直接讀取精確的位置信息,而不需要使用復雜的轉換電路。
在硬件連接時,需要將編碼器的信號線正確接入伺服驅動器,確保信號傳輸?shù)姆€(wěn)定性和可靠性。
二、參數(shù)設置
主伺服驅動器參數(shù)設置:
在主伺服驅動器中,需要設置相關參數(shù)以控制電機的輸出。例如,可以設置pr5.03參數(shù)來控制輸出脈沖與編碼器反饋脈沖的比例關系。當pr5.03=0時,輸出脈沖等于編碼器反饋脈沖乘以pr0.11設定值乘以4/編碼器分辨率;當pr5.03≠0時,輸出脈沖等于編碼器反饋脈沖乘以pr0.11/pr5.03。
此外,還需要設置其他相關參數(shù),如電機類型、額定電流、額定轉速等,以確保電機能夠按照預定軌跡運動。
從伺服驅動器參數(shù)設置:
在從伺服驅動器中,需要設置相關參數(shù)以實現(xiàn)與主電機的同步運行。例如,可以設置pr0.08參數(shù)為10000(或其他合適的值),使得從電機與主電機同步運行。如果需要改變從電機的轉速比例,可以調整pr0.08的值。
在差分信號輸入方式的參數(shù)設置中,從伺服電機pr0.08的參數(shù)值應為主伺服電機pr0.11的參數(shù)值的4倍,以確保主副伺服電機同步轉速運行。
三、程序設計
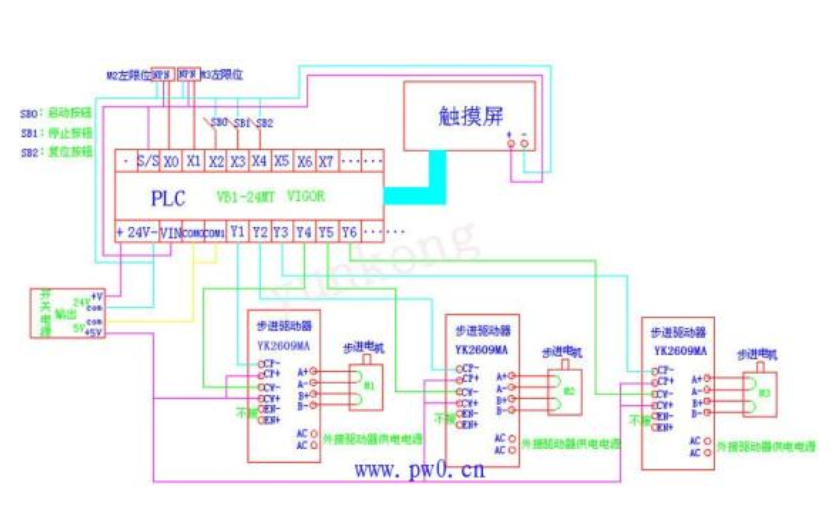
控制器程序設計:
在控制器中,需要編寫相應的程序來控制伺服電機的運行。程序需要能夠接收外部指令,并根據指令調整伺服電機的轉速和轉向。同時,程序還需要能夠讀取編碼器的反饋信號,以實現(xiàn)精確的位置和速度控制。
在程序設計中,可以采用PLC(可編程邏輯控制器)作為控制器,利用PLC的編程軟件編寫梯形圖或指令表程序。程序需要能夠處理輸入信號、輸出信號以及內部變量等,以實現(xiàn)復雜的控制邏輯。
通信協(xié)議設計:
在主從控制模式下,主伺服驅動器和從伺服驅動器之間需要通過通信接口進行數(shù)據傳輸。因此,需要設計合適的通信協(xié)議來確保數(shù)據傳輸?shù)姆€(wěn)定性和可靠性。通信協(xié)議需要定義數(shù)據的格式、傳輸方式、傳輸速率等參數(shù),以確保主從驅動器之間能夠正確地進行數(shù)據交換。
四、調試與優(yōu)化
系統(tǒng)調試:
在完成硬件連接和參數(shù)設置后,需要對整個系統(tǒng)進行調試以確保其正常運行。調試過程中,需要逐步檢查各個部分的連接和設置是否正確,并觀察電機的運行狀態(tài)是否符合預期。
在調試過程中,可以使用示波器、萬用表等工具來檢測信號的質量和穩(wěn)定性。同時,還需要根據實際情況調整相關參數(shù)以優(yōu)化系統(tǒng)的性能。
性能優(yōu)化:
在系統(tǒng)調試完成后,還需要對系統(tǒng)的性能進行優(yōu)化以提高其運行效率和穩(wěn)定性。優(yōu)化措施包括調整控制參數(shù)、優(yōu)化程序結構、改進通信協(xié)議等。
在優(yōu)化過程中,需要關注系統(tǒng)的響應時間、同步精度、穩(wěn)定性等指標,并根據實際情況進行改進和調整。
五、總結與展望
本文詳細介紹了如何實現(xiàn)兩臺伺服電機的比例同步運行,涵蓋了硬件連接、參數(shù)設置、程序設計以及調試與優(yōu)化等方面。通過合理的硬件連接和參數(shù)設置,結合精確的程序設計和通信協(xié)議設計,可以實現(xiàn)高精度的同步控制。未來,隨著工業(yè)自動化和機器人技術的不斷發(fā)展,伺服電機的應用將更加廣泛,對同步控制的要求也將越來越高。因此,研究和開發(fā)更加高效、精確的同步控制技術具有重要意義。
-
機器人
+關注
關注
213文章
29482瀏覽量
211537 -
伺服電機
+關注
關注
87文章
2100瀏覽量
59140 -
工業(yè)自動化
+關注
關注
17文章
2658瀏覽量
68096
發(fā)布評論請先 登錄
兩臺變頻器控制對拖電機運行,分別進行速度控制和轉矩控制,請教怎么實現(xiàn)加載的過程?
如何控制兩臺速度不同的伺服電機同步起停
使用NI運動控制板卡控制兩臺伺服
如何去實現(xiàn)兩臺電機順序起停控制
基于EKF的兩臺五相PMSM串聯(lián)系統(tǒng)研究







 工商網監(jiān)
工商網監(jiān)
評論