") GNSS仿真測試之三種常用坐標系與轉(zhuǎn)換
GNSS仿真測試之三種常用坐標系與轉(zhuǎn)換
作者介紹
在當今的全球?qū)Ш叫l(wèi)星系統(tǒng)(GNSS)技術(shù)領域,仿真測試是評估和驗證GNSS接收機性能的關鍵環(huán)節(jié),全球?qū)Ш叫l(wèi)星系統(tǒng)(GNSS)仿真測試是確保GNSS接收機和導航解決方案在實際部署前能夠正確、可靠地工作的關鍵步驟。無論是為了確保定位精度、測試信號干擾的影響,還是評估在復雜環(huán)境下的導航可靠性,掌握正確的坐標系知識對于進行有效的仿真測試至關重要。
在GNSS仿真測試的領域,三種關鍵的坐標系構(gòu)成了我們工作的核心:地心地固坐標系(ECEF)、地理坐標系(LLA,包括緯度、經(jīng)度和海拔高度)以及本地水平坐標系(ENU,即東-北-上)。
本文不僅將詳細介紹這三種坐標系的概念和特點,還將探討它們在GNSS仿真測試中的具體應用。我們將學習如何在實際的仿真環(huán)境中使用這些坐標系,以及如何在不同坐標系之間進行精確的轉(zhuǎn)換。這些轉(zhuǎn)換對于確保仿真測試的準確性至關重要,因為它們允許我們將衛(wèi)星的全球位置與接收機的局部視角相匹配。掌握這些坐標系的轉(zhuǎn)換技能都將極大地提升您在GNSS仿真測試中的工作效率和成果的質(zhì)量。
一、坐標系介紹
1.ECFF(Earth-Centered, Earth-Fixed)
ECEF坐標系是一個笛卡爾坐標系,一般中文叫做地心地固坐標系,其原點位于地球質(zhì)心,X軸通過本初子午面和赤道的交點,Y軸位于赤道面上,通過東經(jīng)90度,Z軸指向北極點。這個坐標系隨著地球一起旋轉(zhuǎn),因此它固定在地球上。比如,鳥巢的ECEF坐標約為(-2175804.26,4383129.27,4077167.07),單位為米(m)。
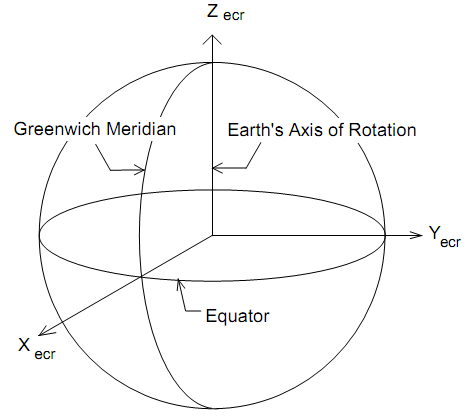
在ECEF坐標系中,地球上的任何點都可以用三個坐標值(X, Y, Z)來表示,分別表示該點相對于地球質(zhì)心的位置。這個坐標系對于全球定位系統(tǒng)(GPS)和其他GNSS系統(tǒng)尤其重要,因為衛(wèi)星的位置通常以ECEF坐標來表示,經(jīng)常被用來精確描述衛(wèi)星的位置和計算衛(wèi)星與接收機之間的距離。
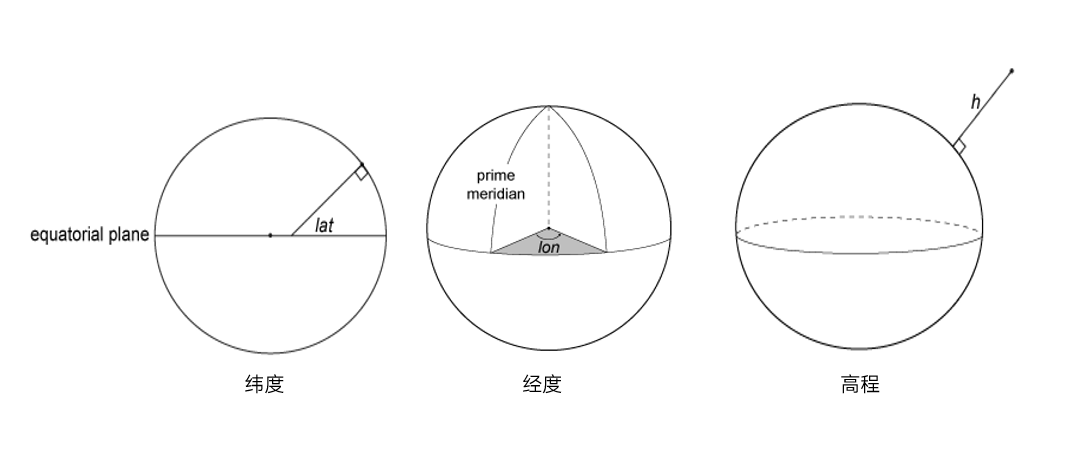
2.LLA(Latitude, Longitude, Altitude)
LLA坐標系是一個球面坐標系,一般稱為地理坐標系,或根據(jù)三軸命名為緯經(jīng)高坐標系,用于描述地球上某一點的位置。它由三個參數(shù)組成:
● 緯度(Latitude):指從赤道(0度緯度)到北極(90度北緯)或南極(90度南緯)的角度測量,它確定了地球表面上一個點的東西位置,范圍為-90°~90°,
● 經(jīng)度(Longitude):指從本初子午線(0度經(jīng)度,通過格林尼治天文臺)到東經(jīng)或西經(jīng)的角度測量,它確定了地球表面上一個點的南北位置,范圍為-180°~180°(或0~360°),
● 海拔高度(Altitude):指從地球表面(通常是平均海平面)到某一點的垂直距離。這個高度可以是從參考橢球體(如WGS84橢球體)的表面計算出的幾何高度,也可以是從平均海平面計算出的正高或從大地水準面計算出的正常高。
比如,鳥巢的LLA坐標為(39.99°,116.40°,50m)。
LLA坐標系是我們在日常生活中最常接觸到的坐標系,如地圖制作、導航和地理信息系統(tǒng)(GIS)中廣泛使用,或用于將地球表面的位置轉(zhuǎn)換為其他坐標系。在GNSS仿真測試中,LLA坐標系常用于定義接收機的初始位置和移動路徑。
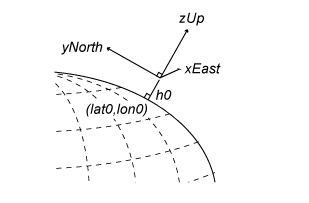
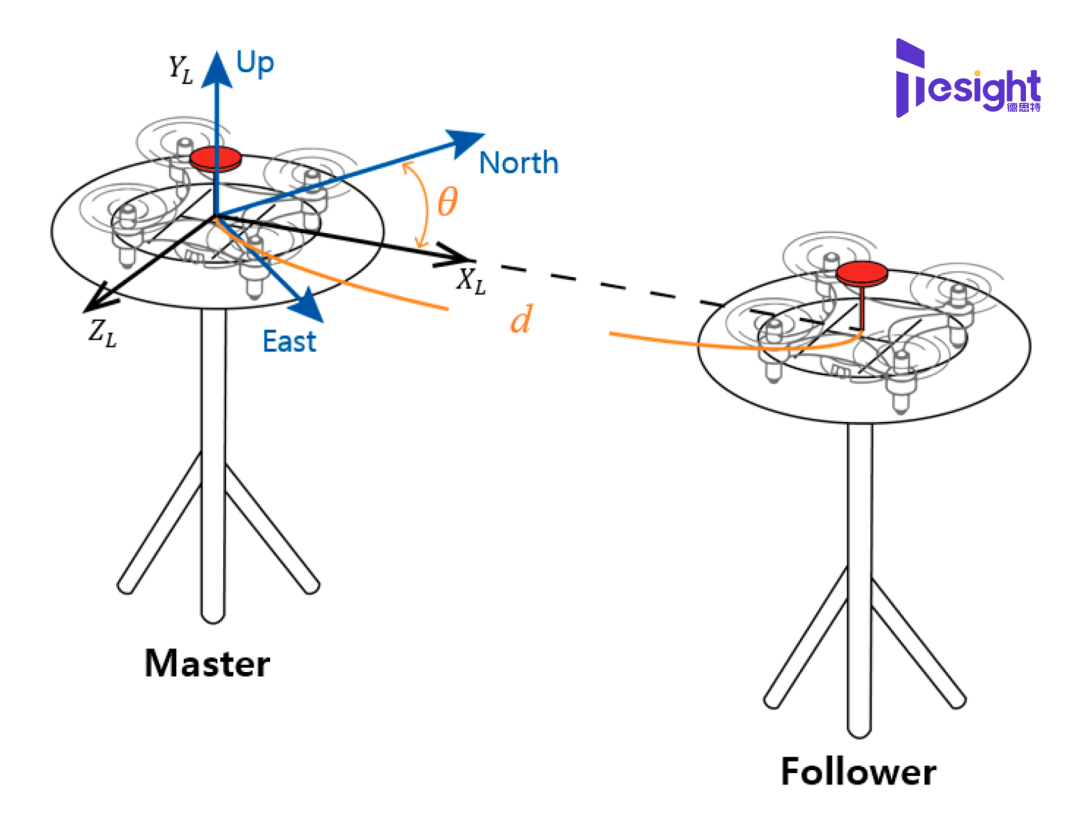
3.ENU(East-North-Up)
ENU坐標系是一個笛卡爾坐標系,是一個局部的本地水平坐標系,也稱為東北天(東北上)坐標系。其原點位于地球表面上的一個特定點,通常與接收機的位置相對應。在ENU坐標系中,東軸(East)指向當?shù)氐臇|方向,北軸(North)指向當?shù)氐谋狈较颍陷S(Up)垂直于水平面,指向天空。本地原點由大地坐標( lat0、lon0、h0 )描述。請注意,原點不一定位于橢球體的表面上。
若以鳥巢本身為原點,那么他的ENU坐標為(0,0,0),單位為m。
ENU坐標系常用于描述接收機附近的物體運動,如車輛的行駛軌跡或無人機的飛行路徑,因為它提供了一個與接收機位置直接相關的坐標系。
4.三個坐標系的對比
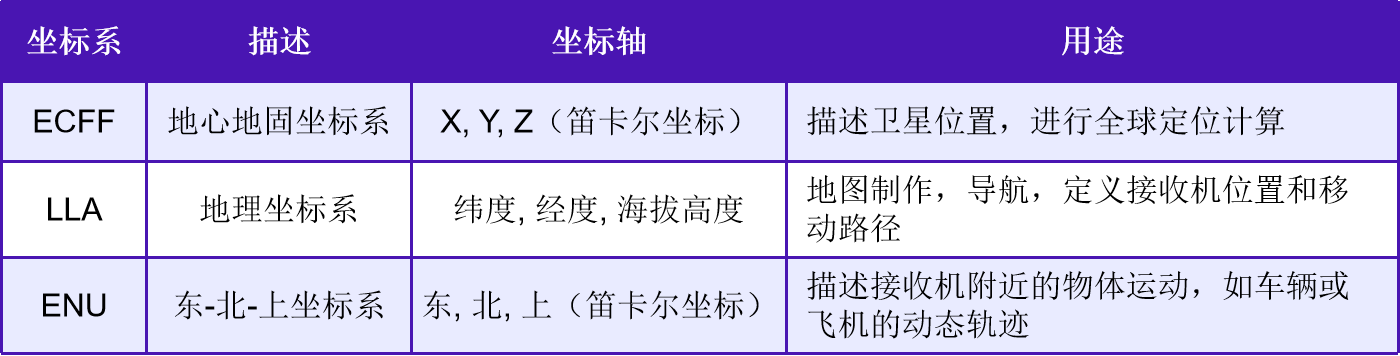
除此之外,還有一些常用的坐標系,例如NED坐標系(東北下坐標系)、AER坐標系(方位角-仰角-范圍本地坐標系)等。
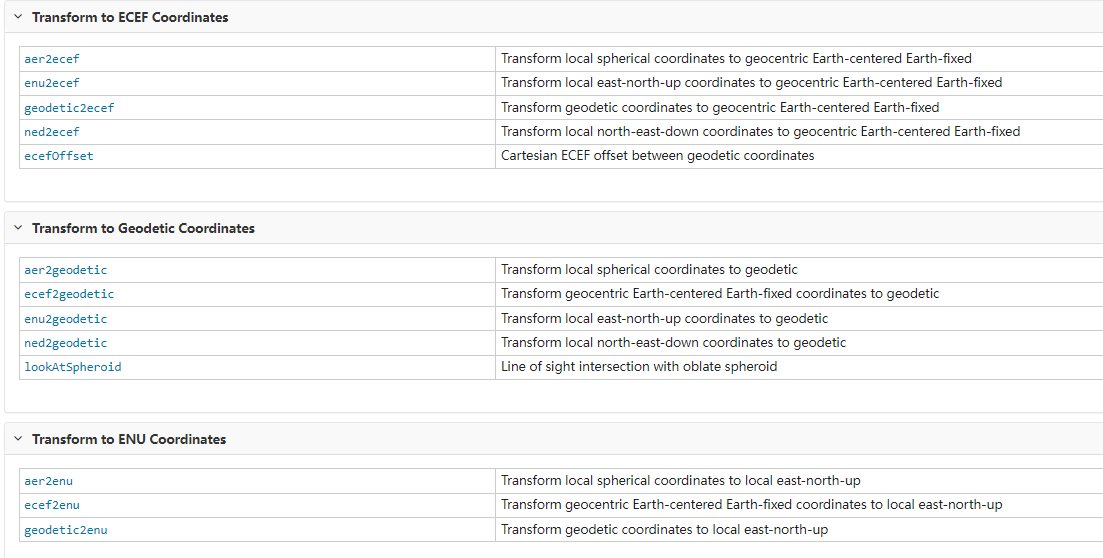
二、三個坐標系的轉(zhuǎn)換
ECEF(地心地固坐標系)、LLA(地理坐標系)和ENU(東-北-上坐標系)之間的轉(zhuǎn)換是通過一系列數(shù)學公式實現(xiàn)的。以下是這些坐標系之間轉(zhuǎn)換的基本方法:
1.ECEF到LLA的轉(zhuǎn)換:
這種轉(zhuǎn)換涉及到從笛卡爾坐標(X, Y, Z)到球面坐標(緯度, 經(jīng)度, 海拔高度)的轉(zhuǎn)換。
● 首先,可以通過X和Y坐標計算出經(jīng)度,通過Z坐標和地球的扁率計算出緯度。
● 然后,使用地球的參考橢球模型(如WGS84)來計算海拔高度。
2.LLA到ECEF的轉(zhuǎn)換:
這種轉(zhuǎn)換是從球面坐標到笛卡爾坐標的轉(zhuǎn)換。
● 經(jīng)度和緯度可以直接用于計算ECEF坐標中的X和Y值。
● 海拔高度和地球的參考橢球模型用于計算Z值。
3.ECEF到ENU的轉(zhuǎn)換:
這種轉(zhuǎn)換通常需要一個參考點,該點的LLA坐標已知。
● 首先,將參考點的ECEF坐標轉(zhuǎn)換為LLA坐標。
● 然后,使用參考點的LLA坐標,通過一系列旋轉(zhuǎn)和平移變換,將ECEF坐標轉(zhuǎn)換為ENU坐標。
4.ENU到ECEF的轉(zhuǎn)換:
這是ECEF到ENU轉(zhuǎn)換的逆過程。
● 首先,根據(jù)參考點的LLA坐標計算坐標點的LLA坐標
● 經(jīng)度和緯度可以直接用于計算ECEF坐標中的X和Y
● 海拔高度和地球的參考橢球模型用于計算Z值。
這些轉(zhuǎn)換涉及到復雜的數(shù)學計算,包括球面三角學、旋轉(zhuǎn)矩陣和橢球幾何學。
在實際應用中,這些轉(zhuǎn)換通常通過專業(yè)的數(shù)學庫或GIS軟件來實現(xiàn),如PROJ、GDAL或MATLAB的地理工具箱等。
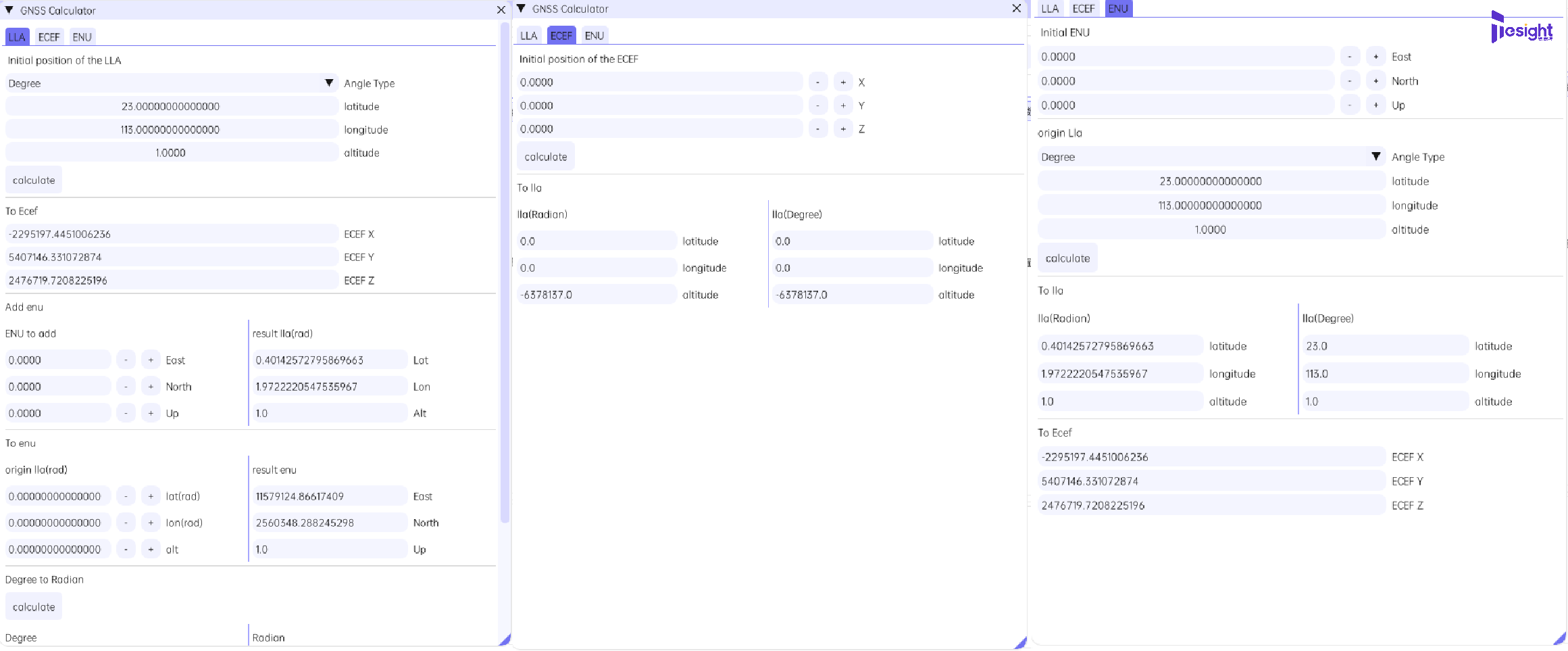
德思特AutoTest自動化測試平臺為用戶提供三種坐標軸的快速轉(zhuǎn)換工具,簡單輸入現(xiàn)有坐標點即可完成對其他兩個坐標系的轉(zhuǎn)換。
審核編輯 黃宇
-
GNSS
+關注
關注
9文章
839瀏覽量
49006 -
仿真測試
+關注
關注
0文章
95瀏覽量
11534
發(fā)布評論請先 登錄
VirtualLab Fusion應用:Ince-Gaussian模式
電機矢量控制中坐標變換的詳細推導(可下載)
RTK技術(shù)揭秘:基線長度如何決定厘米級定位精度?
LSM6DSV16X內(nèi)置的傳感器融合算法SFLP,輸出的四元數(shù)是自身坐標系下的還是全局坐標系下的?
三坐標測量機的機器坐標系和原點介紹

VirtualLab Fusion應用:Ince-Gaussian模式
VirtualLab Fusion應用:Ince-Gaussian模式
三坐標測量機的工作原理 三坐標測量機在質(zhì)量控制中的應用
GNSS仿真中的HiL延遲:挑戰(zhàn)、影響與解決方案深度剖析
常用的pwm跟蹤控制方式是哪三種
abb機器人工具坐標系問題
橋式三坐標測量機和影像測量三坐標介紹






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論