") NVIDIA cuOpt算法將路徑優(yōu)化求解速度提高100倍
NVIDIA cuOpt算法將路徑優(yōu)化求解速度提高100倍
NVIDIA cuOpt 是一個(gè)用于解決復(fù)雜路徑問題的加速優(yōu)化引擎。它能高效解決不同方面的問題,如休息時(shí)間、等待時(shí)間、多個(gè)車輛成本和時(shí)間矩陣、多個(gè)目標(biāo)、訂單-車輛匹配、車輛起始和結(jié)束位置、車輛起始和結(jié)束時(shí)間等。
更具體地說,cuOpt 所解決的諸多問題可以歸為兩大類:帶時(shí)間窗的擁擠車輛路徑問題(CVRPTW)和帶時(shí)間窗的取送貨問題(PDPTW)。這些問題的目標(biāo)是在滿足客戶要求的同時(shí),最大程度地減少車輛數(shù)量和總行程。
經(jīng) SINTEF 驗(yàn)證,過去三年中,cuOpt 在最大規(guī)模的路徑基準(zhǔn)測試中打破了 23 項(xiàng)世界紀(jì)錄。
本文將探討優(yōu)化算法的關(guān)鍵要素和定義,以及在基準(zhǔn)測試中比較 NVIDIA cuOpt 與該領(lǐng)域領(lǐng)先解決方案的過程,著重說明進(jìn)行這些比較的重要意義。在本文中,我們使用“請求”一詞表示 CVRPTW 訂單以及 PDPTW 問題中的取貨-交貨訂單對。
盡管該領(lǐng)域存在各種約束和問題維度,但本文的討論范圍僅限于容量和時(shí)間窗約束。容量約束要求車輛上的商品總量在任何時(shí)候都不能超過車輛容量。時(shí)間窗約束則要求服務(wù)訂單的時(shí)間不能早于時(shí)間窗的開始時(shí)間,也不能晚于時(shí)間窗的結(jié)束時(shí)間。
組合優(yōu)化
組合優(yōu)化問題是世界上計(jì)算成本最高的問題之一(NP-hard),搜索空間中可能狀態(tài)的數(shù)量是階乘的。由于不可能使用精確算法來解決大型問題,因此需要使用啟發(fā)式算法來接近最優(yōu)解決方案。啟發(fā)式算法使用各種算法探索搜索空間,這些算法具有二次方或更高次方的計(jì)算復(fù)雜度。
高度的復(fù)雜性和問題的性質(zhì)使得使用大規(guī)模并行 GPU 加速這些算法成為可能。借助 GPU 加速,可以在合理的時(shí)間內(nèi)獲得接近最優(yōu)的解決方案。
構(gòu)建進(jìn)化路徑優(yōu)化算法
典型的路徑求解器包括兩個(gè)階段:生成初始解決方案和改進(jìn)解決方案。本章將介紹生成初始解決方案和改進(jìn)解決方案的步驟。
初始解決方案生成算法
利用有限的車隊(duì)生成一個(gè)可行的初始解決方案并滿足所有約束條件,本身就是一個(gè) NP-hard 問題。我們的團(tuán)隊(duì)對引導(dǎo)彈射搜索(GES)算法進(jìn)行了改進(jìn)和并行化,以便將請求放置到路徑上。
GES 的主要想法很簡單。我們首先嘗試將請求插入路徑。如果插入該請求不可行,我們就從路徑中彈出一個(gè)或多個(gè)易于插入的請求,然后將該請求插入到放寬的路徑中。每個(gè)請求的懲罰分?jǐn)?shù)(p-score)表示將該請求插入路徑的難度。只有當(dāng)被彈出請求的 p 分?jǐn)?shù)之和小于所考慮的請求時(shí),算法才會插入該請求。
無法將某個(gè)請求插入路徑時(shí),我們就會遞增該請求的 p-score,然后再試一次。我們會將所有未提供服務(wù)的請求保留在彈出池中,算法會一直運(yùn)行到彈出池清空為止。換句話說,它會一直運(yùn)行到所有請求都被服務(wù)為止。
這種算法的主要缺點(diǎn)是循環(huán)(返回到解決方案中的前一組節(jié)點(diǎn))。當(dāng)彈射節(jié)點(diǎn)數(shù)量較多時(shí),找到彈射組合的速度較慢。另一個(gè)缺點(diǎn)是只考慮弱的、隨機(jī)擾動的解決方案。我們已經(jīng)消除了這些缺陷,能夠生成路徑數(shù)量遠(yuǎn)低于當(dāng)前最先進(jìn)方法的解決方案。
在深入探討彈射算法之前,了解可行性檢查和解決方案評估是在恒定時(shí)間內(nèi)通過時(shí)間扭曲法進(jìn)行的,這點(diǎn)十分重要。雖然這種方法大大縮短了計(jì)算時(shí)間,但由于需要遵守任意數(shù)量彈射搜索的詞典順序,因此也增加了并行化的難度。
查找哪些請求需要彈出,以及在何處可行地插入所考慮的請求是一個(gè)計(jì)算成本很高的問題:它與彈出請求的數(shù)量成指數(shù)關(guān)系,并且需要檢查所有路徑中的所有插入位置。我們的實(shí)驗(yàn)表明,少量的彈出請求就會引發(fā)算法循環(huán)。
因此,我們提出了一種可以并行彈出多達(dá) 10 個(gè)請求(啟發(fā)式)和 5 個(gè)請求(當(dāng)進(jìn)行廣泛搜索時(shí))的方法。我們將彈出算法并行化,從每個(gè)路徑中彈出一個(gè)片段,并在一個(gè)線程塊中處理這些臨時(shí)路徑。然后,嘗試在所有可能的位置并行插入所考慮的請求。
深度搜索算法會嘗試彈出路徑中所有請求的所有可能排列。我們將不同的線程塊用于每個(gè)請求插入位置,并通過將詞序拆分為獨(dú)立的子排列來并行執(zhí)行詞序搜索。
GES 算法循環(huán)運(yùn)行,直到耗盡時(shí)間或請求池為空。在每次迭代中,我們都會對解決方案進(jìn)行擾動以改進(jìn)解決方案的狀態(tài),并打開解決方案中的缺口,從而找到可行的插入方案。擾動是一種在路徑之間和路徑內(nèi)部隨機(jī)遷移和交換節(jié)點(diǎn)的隨機(jī)局部搜索。
在找到滿足要求的最佳車輛數(shù)量后,我們轉(zhuǎn)入改進(jìn)階段,該階段負(fù)責(zé)使目標(biāo)最小化。默認(rèn)情況下的目標(biāo)是總行駛距離,但也可以在 cuOpt 中配置其他目標(biāo)。
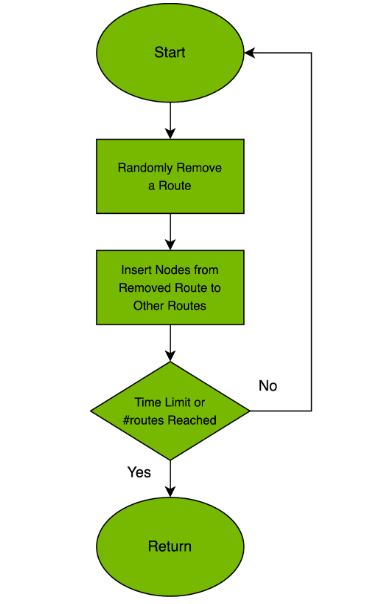
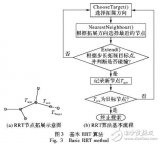
圖 1. NVIDIA cuOpt 中的 GES 算法流程圖
進(jìn)化過程和局部搜索算法
改進(jìn)階段使用進(jìn)化策略對多個(gè)解決方案進(jìn)行改進(jìn),生成的解決方案被置于一個(gè)群體中。為了獲得足夠多樣化的初始解決方案,我們在生成過程中使用了隨機(jī)化技術(shù)。利用 GPU 架構(gòu),我們可以并行生成許多不同的解決方案。多樣化群體會經(jīng)歷一個(gè)進(jìn)化改進(jìn)過程,而解決方案的最佳特性會保留在更新的幾代中。
在進(jìn)化過程的一個(gè)步驟中,我們采用兩個(gè)隨機(jī)解決方案并應(yīng)用交叉算子,這樣就會產(chǎn)生一個(gè)子代解決方案,它繼承了兩個(gè)親代的優(yōu)良特性。可以對解決方案應(yīng)用不同的交叉算子,其中一些算子會使子代處于不完整狀態(tài)。我們可以通過刪除重復(fù)節(jié)點(diǎn)、插入未選擇路徑的節(jié)點(diǎn)或?qū)ζ溥M(jìn)行不可行性局部搜索來修復(fù)解決方案。
例如,基于順序的交叉算子會根據(jù)節(jié)點(diǎn)在另一個(gè)父代解決方案中出現(xiàn)的順序,重新排列一個(gè)父代解決方案的一條或多條路徑中的節(jié)點(diǎn)。由此產(chǎn)生的子代保留了一個(gè)父代解決方案的分組屬性和另一個(gè)方案的排序?qū)傩浴_@個(gè)特殊算子的結(jié)果是一個(gè)完整的解決方案,但就時(shí)間和容量限制而言,該解決方案很可能是不可行的。cuOpt 包含多個(gè)交叉算子,它們在解決方案上隨機(jī)執(zhí)行。
在這種情況下,交叉后的局部搜索階段在減少或消除不可行性,或提高總目標(biāo)或行程距離方面起著至關(guān)重要的作用。局部搜索的目標(biāo)權(quán)重取決于優(yōu)化的重要程度,較高的不可行性權(quán)重有助于將解決方案返回可行區(qū)域,這通常是大多數(shù)問題的情況。
局部搜索為子代解決方案找到局部最小值,然后子代解決方案參與進(jìn)一步的進(jìn)化步驟。快速局部搜索至關(guān)重要,因?yàn)樗窃跁r(shí)間預(yù)算內(nèi)完成多少次改進(jìn)迭代的主要因素。我們使用快速、近似和大型鄰域搜索算法來找到性能良好的局部最小值。我們沒有像傳統(tǒng)方法那樣執(zhí)行固定大小的鄰域局部搜索,而是設(shè)計(jì)了一個(gè)“網(wǎng)”來快速捕捉容易改進(jìn)的地方,并在達(dá)到停滯時(shí)捕捉極深度算子。
快速算子能快速探索小鄰域,而近似算子每次應(yīng)用時(shí)都能評估不同的移動,這一點(diǎn)尤為重要,因?yàn)榻徊娼?jīng)常會使某些路徑保持不變。正如在圖中尋找負(fù)子集相交循環(huán)的 GPU 并行算法中所解釋的,大型鄰域算子以路徑間的移動循環(huán)表示的移動鏈來移動請求。
循環(huán)算子可以探索一個(gè)非常大的鄰域,而簡單算子則無法探索該鄰域,這只是因?yàn)橄拗茥l件禁止這些簡單算子通過搜索空間中的某些山。通過這種工作流,我們可以經(jīng)常使用快速算子,而較少使用計(jì)算成本較高的深度算子。
GPU 并行化是通過將每條假設(shè)路徑映射到一個(gè)線程塊來實(shí)現(xiàn)的。這樣就可以使用共享內(nèi)存來存儲與路徑相關(guān)的數(shù)據(jù),這些數(shù)據(jù)在搜索移動時(shí)是臨時(shí)的。臨時(shí)路徑要么是原始路徑的副本,要么是一個(gè)或多個(gè)請求被彈出的路徑。線程塊中的線程會嘗試將其他路徑中所有可能的請求插入臨時(shí)路徑的所有位置。
在找到并記錄所有移動后,我們通過將每個(gè)路徑對的插入/彈出成本變量相加,找出每個(gè)路徑對的最佳移動。成本變量使用目標(biāo)權(quán)重計(jì)算得出,其中還包含不可行性懲罰權(quán)重。如果多個(gè)移動對所修改的路徑而言是互斥的,我們就會執(zhí)行多個(gè)這樣的移動。
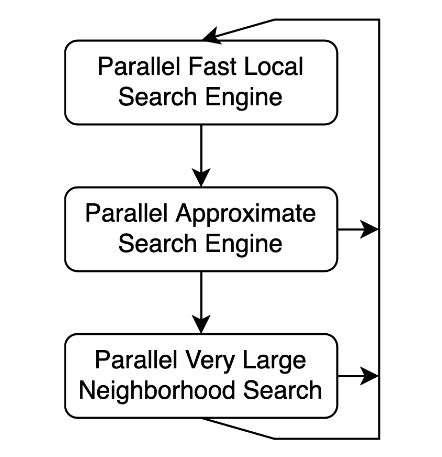
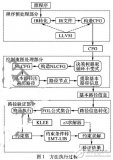
圖 2. NVIDIA cuOpt 中的局部搜索程序流程圖
對 cuOpt 進(jìn)行基準(zhǔn)測試
我們不斷提高 cuOpt 的性能和質(zhì)量。為了衡量 cuOpt 的質(zhì)量,我們在研究得最多的基準(zhǔn)測試(包括 Gehring & Homberger CVRPTW 基準(zhǔn)測試和 Li & Lim PDPTW 基準(zhǔn)測試)上將求解器與最著名的解決方案進(jìn)行了比較。在實(shí)踐中,求解器能多快得出所需的解決方案對企業(yè)非常重要。
評估標(biāo)準(zhǔn)和目標(biāo)
準(zhǔn)確度被定義為找到的解決方案與已知最佳解決方案(BKS)在目標(biāo)方面的差距百分比。根據(jù)問題說明,第一個(gè)目標(biāo)是車輛數(shù),第二個(gè)目標(biāo)是行駛距離。
求解時(shí)間是指達(dá)到與最佳已知解決方案或預(yù)期目標(biāo)結(jié)果之間的某一差距所需的時(shí)間。求解時(shí)間是實(shí)際用例中最重要的標(biāo)準(zhǔn)之一,在預(yù)算時(shí)間內(nèi)獲得高準(zhǔn)確度的解決方案非常重要,組合優(yōu)化算法需要花費(fèi)大量時(shí)間。
圖 3 和圖 4 顯示了求解器在大型基準(zhǔn)測試實(shí)例子集上的收斂行為。
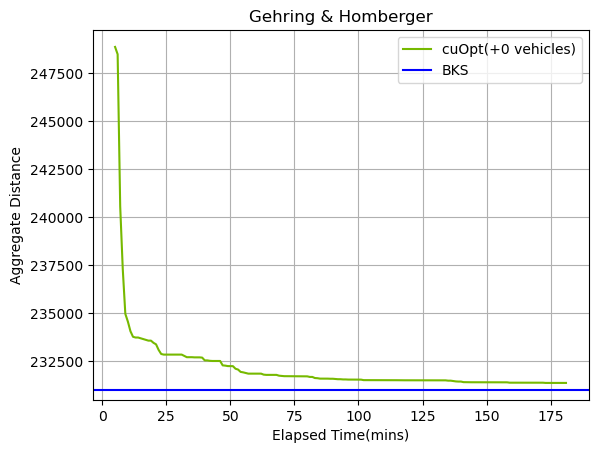
圖 3. cuOpt 在 CVRPTW 問題上的收斂行為
我們從每個(gè)類別(C1_10_1、C2_10_1、R1_10_1、R2_10_1、RC1_10_1、RC2_10_1)中選取了一個(gè)實(shí)例,以展示求解器的整體行為取決于(聚類、隨機(jī))和(長路徑、短路徑)實(shí)例。我們將每分鐘采樣的總和與總 BKS 進(jìn)行比較。
隨著時(shí)間的推移,一開始的急劇收斂會慢慢接近總 BKS。在這些實(shí)例集中,我們能夠匹配 BKS 的總車輛數(shù),cuOpt 求解器幾乎可以在 Gehring 和 Homberger 的所有實(shí)例中找到 BKS 的車輛數(shù),但實(shí)際性能取決于生成初始解決方案相比改進(jìn)階段所花費(fèi)的時(shí)間。
求解器在較大的實(shí)例中收斂速度很快,而在較小的實(shí)例中,收斂速度更是要快上幾個(gè)數(shù)量級。在下表中,我們展示了在達(dá)到與 BKS 相同的車輛數(shù)的同時(shí),在不同規(guī)模的問題上達(dá)到 BKS 所需的時(shí)間。
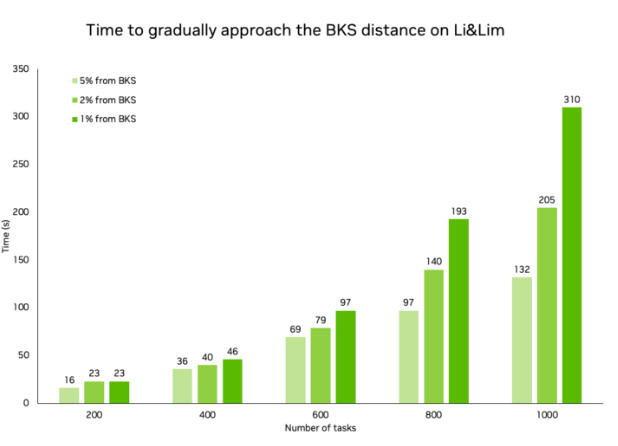
圖 4. PDPTW 問題求解時(shí)間
cuOpt 創(chuàng)造 23 項(xiàng)世界紀(jì)錄
憑借使用 GPU 加速啟發(fā)式算法和最先進(jìn)的策略這一新方法,cuOpt 打破了 Gehring & Homberger 基準(zhǔn)測試中 15 個(gè)實(shí)例和 Li & Lim 基準(zhǔn)測試中 8 個(gè)實(shí)例的紀(jì)錄。
目前,NVIDIA 保持著過去三年 CVRPTW 和 PDPTW 類別的所有紀(jì)錄。
在圖 5 中,每條邊代表從一個(gè)任務(wù)到另一個(gè)任務(wù)的路徑。綠線代表與前一記錄相同的邊緣,藍(lán)色和紅色邊代表兩個(gè)解決方案之間的差異。由于采用了進(jìn)化策略,cuOpt 解決方案在可能解的搜索空間中處于完全不同的位置,這意味著存在許多不同的邊緣。
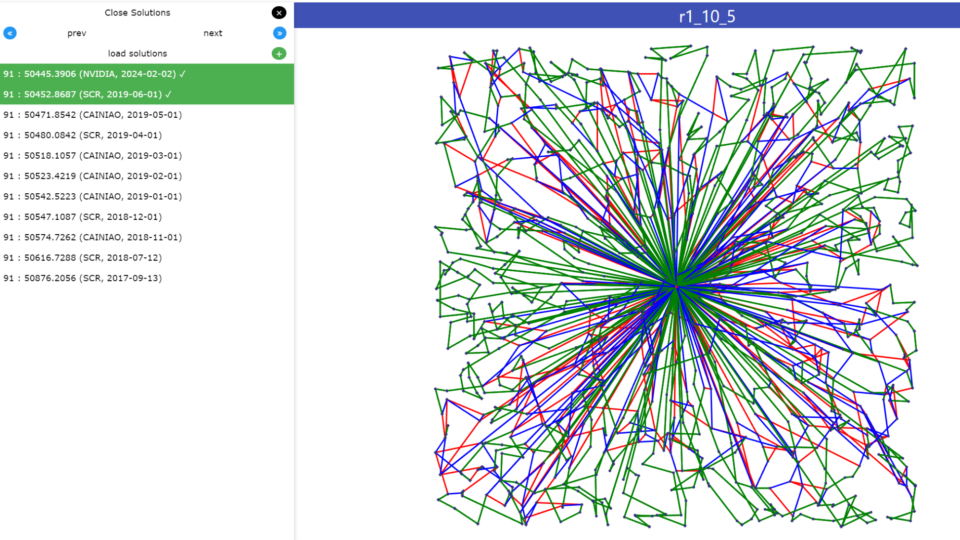
圖 5. cuOpt 世界紀(jì)錄與前紀(jì)錄的路徑可視化圖對比
來源:Combopt.org
Gehring & Homberger 與 BKS 的總體平均差距為 -0.07% 距離差距和 0.29% 車輛數(shù)差距。Li & Lim 與 BKS 的總體平均差距為 1.22% 距離差距和 0.36% 車輛數(shù)量差距。基準(zhǔn)測試在單顆 NVIDIA GPU 上運(yùn)行了 200 分鐘。
總結(jié)
NVIDIA cuOpt 利用 GPU 加速和 RAPIDS 等 NVIDIA 技術(shù),在數(shù)秒內(nèi)即可獲得高質(zhì)量的解決方案。我們的局部搜索運(yùn)行速度較基于 CPU 的方法提高了 100 倍,基于 CPU 的求解器需要數(shù)小時(shí)才能獲得類似的解決方案。
審核編輯:劉清
-
NVIDIA
+關(guān)注
關(guān)注
14文章
5232瀏覽量
105715 -
GPU芯片
+關(guān)注
關(guān)注
1文章
305瀏覽量
6116
原文標(biāo)題:屢創(chuàng)紀(jì)錄:NVIDIA cuOpt 算法將路徑優(yōu)化求解速度提高 100 倍
文章出處:【微信號:NVIDIA-Enterprise,微信公眾號:NVIDIA英偉達(dá)企業(yè)解決方案】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
基于改進(jìn)DE算法的難約束優(yōu)化問題的求解
一種求解關(guān)鍵路徑的新算法
如何將數(shù)字電位器的帶寬從10倍提高到100倍
求解物流路徑優(yōu)化的改進(jìn)遺傳算法研究
基于路徑跟蹤方法的路徑規(guī)劃算法
基于SMT求解器的程序路徑驗(yàn)證方法
改進(jìn)局部搜索混沌離散粒子群優(yōu)化算法
基于Spark的并行蟻群優(yōu)化算法

一種改進(jìn)灰狼優(yōu)化算法的用于求解約束優(yōu)化問題
智能電網(wǎng)定價(jià)的光學(xué)優(yōu)化算法
使用分層自主學(xué)習(xí)提高粒子群優(yōu)化算法的收斂精度和收斂速度的詳細(xì)說明

AutoML技術(shù)提高NVIDIA GPU和RAPIDS速度





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論