") 康謀分享 | aiSim5 物理相機傳感器模型驗證方法(一)
康謀分享 | aiSim5 物理相機傳感器模型驗證方法(一)

摘要:
aiSim5可以實時模擬復(fù)雜的傳感器配置,在多GPU分布式渲支持的支持下,aiSim可以渲染20多個攝像頭、10多個雷達和10多個激光雷達在同一環(huán)境下運行。aiSim5獨有的實時渲染引擎能夠滿足對物理精確環(huán)境和天氣模擬的所有要求,具有完全的決定性和可重復(fù)性。
 圖1:aiSim 重建場景
圖1:aiSim 重建場景 圖2:真實場景
圖2:真實場景aiSim5基于物理的相機模型將會通過以下方法驗證其與真實世界的相關(guān)性:
一、光照度測試
aiSim 擁有內(nèi)置的光照度傳感器,因此可以使用光照度傳感器對aiSim的照明模型和材質(zhì)進行端到端的驗證。
1、案例1
在 aiSim 中重新模擬一個高速公路場景,并匹配相應(yīng)的天氣效果。
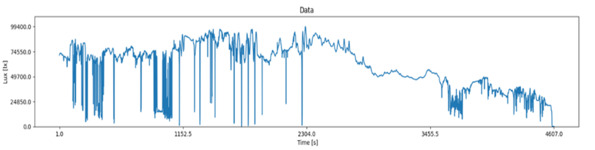 ?圖3
?圖3目前正在 aiSim 中重建這一場景并測試這一光照度測量結(jié)果。
2、案例2
驗證人工照明模型以及aiSim車庫地圖的相關(guān)性時,可以在車庫使用匹配的光照屬性進行重新模擬,aiSim 中會產(chǎn)生相似的結(jié)果。
 ?圖4:真實世界中進行傳感器標(biāo)定的場景
?圖4:真實世界中進行傳感器標(biāo)定的場景 圖5:aiSim中搭建的用于相機標(biāo)定車庫場景
圖5:aiSim中搭建的用于相機標(biāo)定車庫場景二、色彩校準(zhǔn)測試
1、簡介
在進行相機圖像匹配時,使用Color Correction Matrix (CCM) 是一種有效的方法,可以通過對已知相機拍攝的參考照片和aiSim渲染的Macbeth色板圖表進行比較來計算CCM。
 圖6
圖6 圖7
圖72、具體步驟
- 準(zhǔn)備參考照片:首先,需要一張使用已知相機拍攝的Macbeth色板的照片。Macbeth色板是一個標(biāo)準(zhǔn)化的顏色樣本集,通常用于色彩管理和校準(zhǔn)。
- 獲取aiSim渲染的Macbeth色板:接著,你需要在aiSim中創(chuàng)建一個Macbeth色板的渲染圖。確保渲染環(huán)境的光照條件與參考照片盡可能一致,以便更準(zhǔn)確地匹配顏色。
- 應(yīng)用CCM:計算出CCM后,aiSim可以將其應(yīng)用于aiSim的圖像輸出,進行顏色校正。
- 驗證和調(diào)整:應(yīng)用CCM后,比較aiSim輸出的顏色與參考照片的顏色。如果存在差異,可能需要進一步調(diào)整CCM的參數(shù)或重新計算,直到達到滿意的匹配效果。
通過這種方法,可以確保aiSim的輸出顏色與實際拍攝的照片顏色盡可能一致,從而提高圖像的真實性和準(zhǔn)確性。
三、離線仿真器驗證
1、簡介
也可以采用基于物理的渲染(PBR)離線渲染器進行比較。
2、具體步驟
- 構(gòu)建相同樣本場景:在aiSim和參考渲染器中構(gòu)建相同的樣本場景。這包括場景中的所有物體、材質(zhì)、光照條件等,以確保兩個環(huán)境中的變量盡可能一致。
- 使用相同的相機參數(shù):使用相同的相機外部參數(shù)(extrinsic)和內(nèi)部參數(shù)(intrinsic)來拍攝場景。外部參數(shù)涉及相機在世界空間中的位置和方向,而內(nèi)部參數(shù)則包括焦距、畸變等相機特有的屬性。
- 進行HDR或LDR驗證:無論是高動態(tài)范圍(HDR)還是低動態(tài)范圍(LDR)驗證,都可以用于比較兩個渲染器生成的圖像。選擇哪種驗證方式取決于場景的光照條件和所需的驗證精度。
- 比較生成圖像的差異:對aiSim生成的圖像和參考渲染器生成的圖像進行比較。可以通過視覺檢查或使用圖像分析工具來量化差異,如計算顏色偏差、亮度對比度等。
- 多場景驗證:通過多個不同的場景來驗證系統(tǒng)的不同部分,例如只驗證人工光源,或者只驗證天空和太陽的效果等。可以幫助識別和隔離特定問題,提高驗證的針對性和效率。
以上方法均適用于驗證aiSim相機傳感器模型與現(xiàn)實世界或高精度的離線渲染器的相關(guān)性。
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
傳感器
+關(guān)注
關(guān)注
2565文章
52982瀏覽量
767281 -
自動駕駛
+關(guān)注
關(guān)注
789文章
14316瀏覽量
170598 -
汽車自動駕駛
+關(guān)注
關(guān)注
0文章
13瀏覽量
3807
發(fā)布評論請先 登錄
相關(guān)推薦
熱點推薦
康謀加入ASAM組織,自動駕駛仿真平臺aiSim引領(lǐng)安全新標(biāo)桿
康謀科技正式加入全球汽車標(biāo)準(zhǔn)化組織 ASAM(Association for Standardization of Automation and Measuring Systems),成為其正式會員單位!
康謀分享 | 物理級傳感器仿真:破解自動駕駛長尾場景驗證難題
本文聚焦物理級仿真,剖析攝像頭光學(xué)建模、CMOS 光電轉(zhuǎn)換、激光雷達高斯光束與衰減建模,解讀 ASAM OpenMATERIAL 3D 標(biāo)準(zhǔn),以構(gòu)建可信仿真閉環(huán),助力算法驗證與高階智駕落地。

康謀分享 | 基于多傳感器數(shù)據(jù)的自動駕駛仿真確定性驗證
自動駕駛仿真測試中,游戲引擎的底層架構(gòu)可能會帶來非確定性的問題,侵蝕測試可信度。如何通過專業(yè)仿真平臺,在多傳感器配置與極端天氣場景中實現(xiàn)測試數(shù)據(jù)零差異?確定性驗證方案已成為自動駕駛研發(fā)的關(guān)鍵突破口!

改進電壓模型的異步電機無速度傳感器矢量控制
無速度傳感器矢量控制技術(shù)能夠有效提高交流傳動系統(tǒng)的可靠性,降低系統(tǒng)成本。該技術(shù)的核心問題是準(zhǔn)確獲取電機轉(zhuǎn)子轉(zhuǎn)速,并將其反饋到速度閉環(huán)控制環(huán)節(jié)。介紹一種采用改進模型參考自適應(yīng)轉(zhuǎn)速估計方法
發(fā)表于 05-28 15:43
康謀分享 | 自動駕駛仿真進入“標(biāo)準(zhǔn)時代”:aiSim全面對接ASAM OpenX
自動駕駛領(lǐng)域,仿真與標(biāo)準(zhǔn)接口至關(guān)重要。康謀aiSim集成ASAM OpenX系列標(biāo)準(zhǔn),通過OpenDRIVE、OpenSCENARIO等五大標(biāo)準(zhǔn),全面優(yōu)化仿真各環(huán)節(jié),提升測試效率與規(guī)范性,推動自動駕駛規(guī)模化落地。

深謀科技獨樹一幟,發(fā)布高精度壓電式六維力傳感器“彈起”,滿足多領(lǐng)域高動態(tài)力控需求
北京深謀科技有限公司近日發(fā)布了一款業(yè)界罕見的高精度壓電式六維力傳感器,名曰“彈起”,特別適配服務(wù)機器人、人形機器人、航空航天、醫(yī)療、工業(yè)自動化等對環(huán)境高動態(tài)交互和多維力控制要求極高的場景。該產(chǎn)品具備

深度剖析傳感器仿真
傳感器仿真對真實世界傳感器的物理屬性和行為進行建模,以再現(xiàn)其感知周圍環(huán)境的過程。該技術(shù)使開發(fā)者能夠擁有一個安全的試驗場,來訓(xùn)練、測試和驗證用
康謀應(yīng)用 | 基于多傳感器融合的海洋數(shù)據(jù)采集系統(tǒng)
在海洋監(jiān)測與無人艇控制領(lǐng)域,數(shù)據(jù)采集面臨數(shù)據(jù)噪聲誤差、融合協(xié)同等挑戰(zhàn)。本文康謀深度剖析基于多傳感器融合的海洋數(shù)據(jù)采集系統(tǒng)交付案例,詳細解析其方案架構(gòu)、系統(tǒng)搭建等內(nèi)容,展現(xiàn)如何提升數(shù)據(jù)采集質(zhì)量,從而推動無人艇自主航行及算法訓(xùn)練!

康謀分享 | 3DGS:革新自動駕駛仿真場景重建的關(guān)鍵技術(shù)
3DGS技術(shù)為自動駕駛仿真場景重建帶來突破,通過3D高斯點精確表達復(fù)雜場景的幾何和光照特性,顯著提升渲染速度與圖像質(zhì)量。康謀aiSim平臺結(jié)合3DGS,提供高保真虛擬環(huán)境與動態(tài)交通流模擬,優(yōu)化自動駕駛測試效率與精度

康謀方案 | 基于AI自適應(yīng)迭代的邊緣場景探索方案
測試 ADAS/AD 系統(tǒng)時,傳統(tǒng) DoE 方法難以覆蓋駕駛邊緣場景,影響自動駕駛性能提升。康謀 aiSim集成的aiFab方案,以貝葉斯優(yōu)化為核心,依據(jù)碰撞時間等關(guān)鍵指標(biāo),快速定位高
激光位移傳感器的校準(zhǔn)方法
激光位移傳感器的校準(zhǔn)方法主要包括以下步驟: 一、準(zhǔn)備階段 設(shè)備準(zhǔn)備 : 激光位移傳感器 標(biāo)準(zhǔn)位移裝置(如標(biāo)準(zhǔn)振動臺或精密滑軌) 數(shù)據(jù)采集系統(tǒng) 讀數(shù)顯微鏡(或激光干涉儀等高精度測量設(shè)備,
線性傳感器和非線性傳感器的區(qū)別
線性傳感器和非線性傳感器在多個方面存在顯著的區(qū)別,以下是對這些區(qū)別的詳細闡述:
一、輸入輸出關(guān)系
線性傳感器:
線性傳
康謀技術(shù) | 毫米波雷達技術(shù)解析
自動駕駛技術(shù)飛速發(fā)展,毫米波雷達已成為自動駕駛傳感器套件的關(guān)鍵。為此,康謀為您深度解析毫米波雷達技術(shù),從概述到工作原理,再到前沿的4D技術(shù),全面揭示其在自動駕駛中的重要作用。快來了解,一

康謀分享 | 汽車仿真與AI的結(jié)合應(yīng)用
實現(xiàn)高質(zhì)量的虛擬傳感器輸出是自動駕駛領(lǐng)域的一項關(guān)鍵挑戰(zhàn),然而傳統(tǒng)方案對廣角鏡頭的渲染和處理等方面仍存在一定的局限性。為此,康謀為您介紹

康謀技術(shù) | 自動駕駛傳感器標(biāo)定技術(shù):從單一到聯(lián)合標(biāo)定
進行標(biāo)定以獲取各個傳感器的安裝位置。具體來說,就是通過標(biāo)定確定車身坐標(biāo)系下傳感器的位置。SensorCalibration傳感器標(biāo)定類型在一輛具備L2+級別智駕車上






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論