") 工業(yè)相機(jī)單目和雙目的區(qū)別
工業(yè)相機(jī)單目和雙目的區(qū)別
在實(shí)際應(yīng)用中,被測(cè)平面的不確定性以及鏡頭的畸變使我們已經(jīng)無(wú)法簡(jiǎn)單的使用理想的小孔成像模型計(jì)算出實(shí)際距離,但是我們可以將目前能夠獲得的數(shù)據(jù)進(jìn)行轉(zhuǎn)換,使這些數(shù)據(jù)符合理想的小孔成像模型的使用條件。
就是將任意坐標(biāo)平面通過旋轉(zhuǎn)和平移映射到理想坐標(biāo)平面上,對(duì)有畸變的圖像進(jìn)行校正,讓它成為符合小孔成像模型的像平面。有了這種方法,我們只要確定轉(zhuǎn)換算法、校正算法以及參數(shù)就可以實(shí)現(xiàn)三維空間中任意平面上尺寸與位置的測(cè)量。我們將這種確定參數(shù)的過程稱之為標(biāo)定。
工業(yè)相機(jī)標(biāo)定的目的
工業(yè)相機(jī)標(biāo)定的方法根據(jù)工業(yè)相機(jī)的數(shù)目可分為單目標(biāo)定、雙目標(biāo)定Q以及多目標(biāo)定。
空間物體呈現(xiàn)的是三維幾何位置,相機(jī)內(nèi)的投影圖像為二維位置,可將理想的成像模型簡(jiǎn)化為被測(cè)平面和像平面平行的小孔成像模型。

實(shí)際應(yīng)用中并非如此。由于受到光學(xué)生產(chǎn)工藝的影響,我們常用的工業(yè)相機(jī)鏡頭在制造生產(chǎn)后,我們無(wú)法嚴(yán)格控制像平面和被測(cè)平面的位置,所用的鏡頭也不是嚴(yán)格的小孔模型,其成像總會(huì)呈現(xiàn)或多或少的畸變。
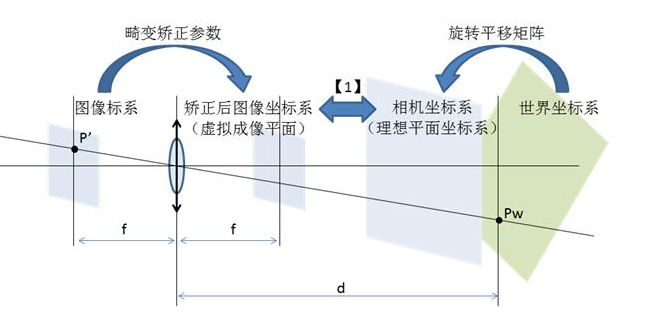
只有在消除畸變的情況下,才能獲取準(zhǔn)確的映射關(guān)系,進(jìn)一步有利于進(jìn)行高精度測(cè)量和定位,我們需要通過標(biāo)定來(lái)實(shí)現(xiàn)坐標(biāo)平面的轉(zhuǎn)換以及圖像的校正。
雙目相機(jī)標(biāo)定在OpenCV中提供了示例程序,本來(lái)是非常簡(jiǎn)單的事情,但是當(dāng)標(biāo)定自己的雙目相機(jī)的時(shí)候卻發(fā)現(xiàn)同樣的程序最后標(biāo)出的結(jié)果卻很差勁,直接表現(xiàn)就是最后進(jìn)行行對(duì)齊的時(shí)候獲得圖像根本不能看,所以從新梳理了雙目標(biāo)定的過程,并給出了對(duì)雙目標(biāo)定結(jié)果的應(yīng)用,比如在ORB-SLAM中,雙目模式是需要進(jìn)行雙目圖像矯正和對(duì)齊的,這時(shí)就可以使用OpenCV提供的函數(shù)接口完成這個(gè)過程,其過程如圖所示:

工業(yè)相機(jī)單目和雙目的區(qū)別
工業(yè)相機(jī)按照其結(jié)構(gòu)特點(diǎn),主要分為單目相機(jī)和雙目相機(jī)。單目相機(jī)和雙目相機(jī)各有其特點(diǎn),它們?cè)?a href="http://www.asorrir.com/tags/機(jī)器視覺/" target="_blank">機(jī)器視覺應(yīng)用中的差異,決定了它們?cè)诓煌瑘?chǎng)景下的適用性。
單目相機(jī)只有一個(gè)鏡頭,通過這個(gè)鏡頭捕捉場(chǎng)景,形成單一的視覺角度。而雙目相機(jī)則擁有兩個(gè)鏡頭,分別從不同的角度捕捉場(chǎng)景,形成立體視覺。這兩種視覺方式在機(jī)器視覺應(yīng)用中各有千秋。
工業(yè)相機(jī)單目和雙目的主要區(qū)別體現(xiàn)在以下幾個(gè)方面:
成像與數(shù)據(jù)處理:?jiǎn)文抗I(yè)相機(jī)捕獲的是二維圖像,而雙目工業(yè)相機(jī)則能夠獲取三維幾何位置信息。雙目工業(yè)相機(jī)基于對(duì)極幾何的理論,通過計(jì)算兩個(gè)相機(jī)之間的視差,可以獲得場(chǎng)景中物體的深度信息,從而實(shí)現(xiàn)三維重建和深度感知。這種深度信息的獲取使得雙目相機(jī)在立體視覺上具有顯著優(yōu)勢(shì),能夠提供更精確的目標(biāo)定位、障礙物檢測(cè)和距離測(cè)量等功能。
應(yīng)用領(lǐng)域:?jiǎn)文肯鄼C(jī)在一些環(huán)境如消費(fèi)電子領(lǐng)域已經(jīng)可以滿足需求。然而,對(duì)于需要進(jìn)行立體深度計(jì)算的場(chǎng)景,雙目相機(jī)則更為適合。雙目相機(jī)廣泛應(yīng)用于機(jī)器人導(dǎo)航、增強(qiáng)現(xiàn)實(shí)、虛擬現(xiàn)實(shí)等領(lǐng)域,其模擬人類的雙目視覺系統(tǒng)的能力使得拍攝的照片或視頻更加逼真、立體。
復(fù)雜性:雙目相機(jī)由于有兩個(gè)鏡頭,因此需要進(jìn)行相機(jī)標(biāo)定和圖像配準(zhǔn),使得其相對(duì)于單目相機(jī)來(lái)說更為復(fù)雜。
成本:由于雙目相機(jī)需要兩個(gè)攝像頭,其成本相對(duì)于只有一個(gè)攝像頭的單目相機(jī)來(lái)說要高。
審核編輯:黃飛
-
攝像頭
+關(guān)注
關(guān)注
61文章
4959瀏覽量
97815 -
相機(jī)鏡頭
+關(guān)注
關(guān)注
0文章
22瀏覽量
9406 -
機(jī)器視覺
+關(guān)注
關(guān)注
163文章
4519瀏覽量
122441 -
工業(yè)相機(jī)
+關(guān)注
關(guān)注
5文章
360瀏覽量
24512
發(fā)布評(píng)論請(qǐng)先 登錄
視覺方案做ADAS,單目和雙目到底有什么差別?

單/雙目的測(cè)距原理區(qū)別
雙目立體視覺原理大揭秘(一)
遺傳算法的單目相機(jī)標(biāo)定
基于單目圖像的深度估計(jì)算法,大幅度提升基于單目圖像深度估計(jì)的精度

工業(yè)相機(jī)和普通相機(jī)的區(qū)別
人臉識(shí)別中雙目、單目、3D結(jié)構(gòu)光攝像頭的區(qū)別
人臉識(shí)別中雙目、單目、3D結(jié)構(gòu)光攝像頭之間的區(qū)別
一文詳細(xì)剖析深度相機(jī)之雙目成像
單目立體視覺:我用單目相機(jī)求了個(gè)體積!
工業(yè)相機(jī)和普通相機(jī)的區(qū)別
自動(dòng)駕駛感知之視覺感知經(jīng)典算法

雙目相機(jī)標(biāo)定的原理和方法

單目光波導(dǎo)AR眼鏡VS雙目光波導(dǎo)智能眼鏡






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論