 采用端到端的逆設計方法實現多維度多通道超構表面全息設計
采用端到端的逆設計方法實現多維度多通道超構表面全息設計
導讀
近日,北京理工大學光電學院黃玲玲教授團隊采用端到端的逆設計方法實現了多維度多通道超構表面全息設計。通過將物理設計問題轉換為數學優化問題,構建損失函數和超構表面結構參數之間的直接關聯關系,基于優化算法,實現了從目標圖像輸入到超構表面參數輸出的端對端設計,簡化了設計流程,提升了多通道全息圖像的重建質量。相關成果以“Multi-dimensional Multiplexed Metasurface Holography by Inverse Design”為題發表于Advanced Materials期刊。北京理工大學光電學院蔣強副研究員和黃玲玲教授為論文通訊作者,碩士研究生尹永耀為論文第一作者。
研究背景
超構表面由二維排列的亞波長超原子組成,作為新型微納光學器件,已成為電磁空間工程和控制波傳播的范例。超構表面可以在亞波長尺度實現對電磁波的振幅、相位和偏振等維度的靈活調控。通過采用多維復用設計,多功能超構表面器件可以顯著減小光學系統的尺寸。將超構表面引入全息中,解決了傳統基于空間光調制器的全息顯示存在的高階衍射、視角小、空間帶寬積小等問題,并可以大大擴展傳統全息技術的信息容量。實現多維復用超構表面全息的長期采用的方法是正向設計,這通常需要廣泛的物理知識來確定超原子排列策略和全息圖計算算法。例如,要實現無串擾的彩色超構表面全息術,直接的途徑是空間復用策略,但這種策略犧牲了空間分辨率并可能導致高階衍射。更高自由度的超原子也許能一定程度上解決問題,但往往對加工提出新的挑戰,并且需要很長時間來構建超原子響應數據庫。
研究亮點
在該工作中,為了打破正向設計的限制并簡化設計流程,團隊提出了一種端到端的逆向設計框架,如圖1所示。通過將超構表面直接與多個目標全息重建圖相關聯,并根據重建圖像質量指導優化過程,實現超構表面的尺寸參數的更新,基于低自由度超原子實現了多維度超構表面的端對端設計。
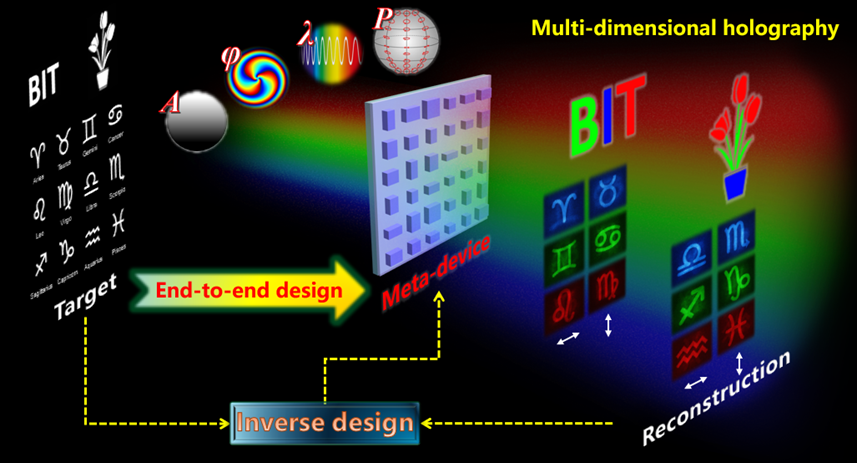
圖1 多維度復用超構表面全息的端到端逆設計框架
所提出的端對端設計流程如圖2所示。在物理設計問題中提取出目標函數、約束條件、求解空間等數學優化問題所需的因素。在初始化過程中,以給定的超原子響應數據庫為求解空間,初始化超構表面上各個超單元的結構參數分布,并將散射場通過衍射傳播算法傳播至對應重建平面,得到數值重建圖像。將多通道下的目標重建圖像與數值重建圖像的均方誤差(MSE)作為損失函數,利用伴隨算法計算MSE關于各個超單元尺寸參數的梯度,并采用基于梯度的優化算法(移動漸近線法MMA)對超單元結構參數分布進行調整,至此完成一輪優化迭代。每一輪迭代的超單元結構參數分布作為下一輪優化的初始值,經過多輪優化后,損失函數收斂,得到最終的超構表面結構參數,完成多維度超構表面器件的設計。
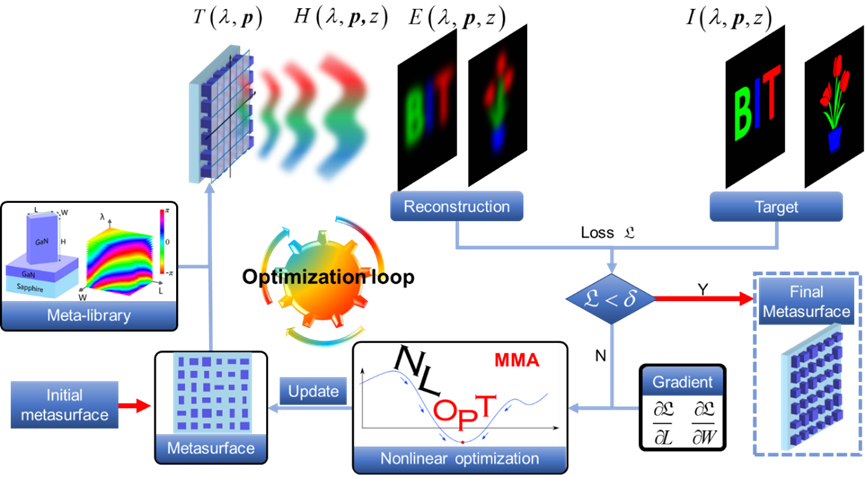
圖2 端對端逆設計算法流程圖
依靠所提出的逆設計方法,團隊設計并實驗演示了偏振加密超構表面全息(樣品1)和彩色超構表面全息(樣品2)。進一步地,將三個波長、兩個正交偏振通道、兩個重建距離組合,研究人員實現了高達12個通道的多維度多通道復用超構表面全息(樣品3)。與正向設計得到的重建圖像相比,逆向設計得到的重建圖像具有更高的重建質量。
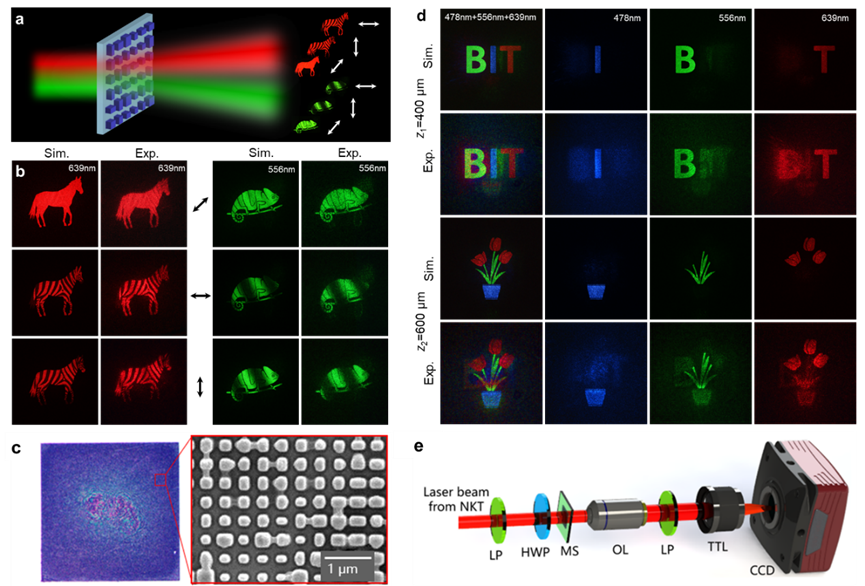
圖3 (a)(b)所設計和加工的偏振加密超構表面全息樣品1和(c)(d)彩色超構表面全息樣品2 (e)為實驗光路圖
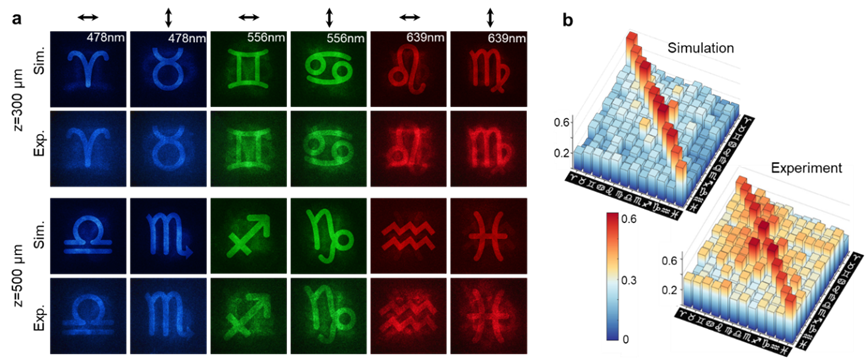
圖4 組合波長、偏振和重建距離實現12通道復用的超構表面全息樣品3
值得注意的是,本研究中使用僅具有兩個自由度的超原子即可實現高達12通道的低串擾全息顯示。研究人員對所使用超單元庫的完備性進行了分析,圖5a和b分別展示了超單元庫的相位響應在三波長空間和線偏振空間的映射分布。可以明顯看出所使用的單元庫是不完備的,無法實現多個波長和偏振態解耦。這種不完備單元庫在正向設計中產生的誤差是難以消除的。但在逆設計中,由于超構表面單元分布直接對全息重建圖像質量負責,沒有中間過程的限制,可以很好地統籌每個通道的圖像重建效果,實現更高的重建質量。端到端的設計思路顯著降低對超原子庫完備性的要求。
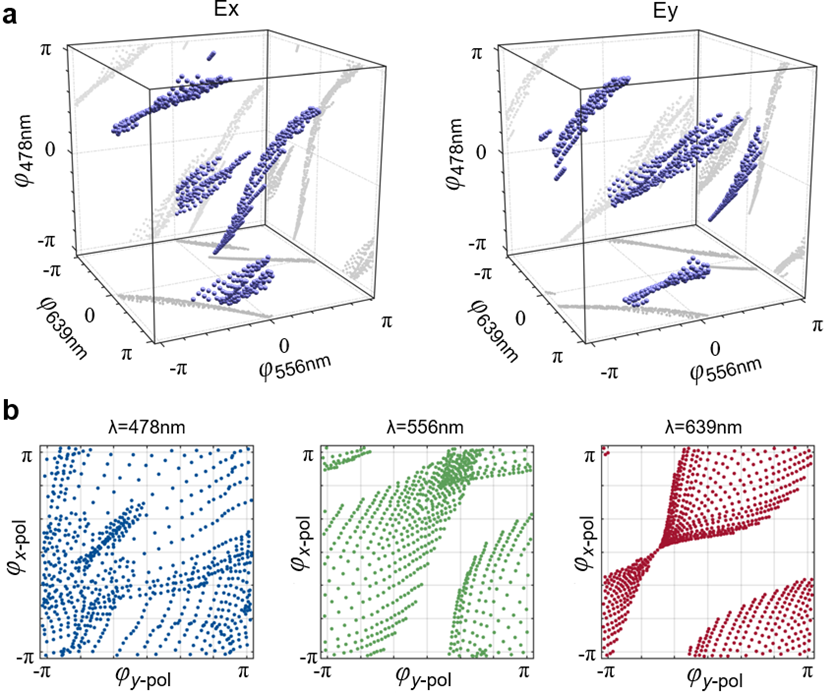
圖5 在(a)三波長空間和(b)線偏振空間中對超單元庫的完備性分析
總結與展望
研究團隊提出了多維度超構表面全息的端到端逆向設計方法,通過僅具有兩個自由度的簡單超原子實現了包含三個波長、兩個偏振態和兩個重建平面的共多達12個通道的全息圖像顯示。該策略通過將超原子映射和散射場衍射傳播的兩個步驟表示為可微分形式,可同時優化整個過程,從而減少了對利用物理知識計算多通道全息圖的依賴。有利于推動多功能超構表面的智能化設計,有望最終加速超構表面器件在彩色顯示、成像、存儲等領域的應用。
該工作得到了國家重點研發計劃、北京市卓越青年科學家計劃、國家自然科學基金等支持。
論文鏈接:
https://onlinelibrary.wiley.com/doi/10.1002/adma.202312303
審核編輯:劉清
-
電磁波
+關注
關注
21文章
1478瀏覽量
54449 -
MSE
+關注
關注
0文章
6瀏覽量
6615 -
光調制器
+關注
關注
0文章
87瀏覽量
8585
原文標題:基于逆向設計的多維度多通道超構表面全息
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
特斯拉帶火“端到端”智駕,國內車企加速上車

VirtualLab Fusion:平面透鏡|從光滑表面到菲涅爾、衍射和超透鏡的演變

《FDTD Solutions仿真全面教程:超構表面與光束操控的前沿探索》
小米汽車端到端智駕技術介紹

技術分享 |多模態自動駕駛混合渲染HRMAD:將NeRF和3DGS進行感知驗證和端到端AD測試

端到端自動駕駛技術研究與分析
黑芝麻智能端到端算法參考模型公布

爆火的端到端如何加速智駕落地?

基于相變材料的可重構超構表面用于圖像處理
連接視覺語言大模型與端到端自動駕駛

端到端InfiniBand網絡解決LLM訓練瓶頸







 工商網監
工商網監
評論