") PMAC與伺服電機(jī)的比較
PMAC與伺服電機(jī)的比較
PMAC與伺服電機(jī)的比較
PMAC和伺服電機(jī)都是用于控制機(jī)械系統(tǒng)的重要組成部分。然而,它們?cè)诠δ芎蛻?yīng)用方面有一些顯著的差異。在本文中,我們將詳細(xì)比較PMAC和伺服電機(jī),并探討它們的特點(diǎn)以及各自的優(yōu)缺點(diǎn)。
首先,讓我們來了解一下PMAC。PMAC是一種可編程的多軸控制器,它通常用于控制復(fù)雜的運(yùn)動(dòng)系統(tǒng),如數(shù)控機(jī)床、機(jī)器人和印刷設(shè)備等。PMAC具有高度靈活性和可編程性,可以根據(jù)應(yīng)用的需求進(jìn)行定制和配置。它支持多種類型的反饋傳感器,例如編碼器和激光測(cè)距儀,以精確測(cè)量和控制位置、速度和加速度等運(yùn)動(dòng)參數(shù)。PMAC還提供了豐富的運(yùn)動(dòng)控制功能,例如路徑規(guī)劃、插補(bǔ)和同步控制等,以實(shí)現(xiàn)高精度和高速度的運(yùn)動(dòng)。
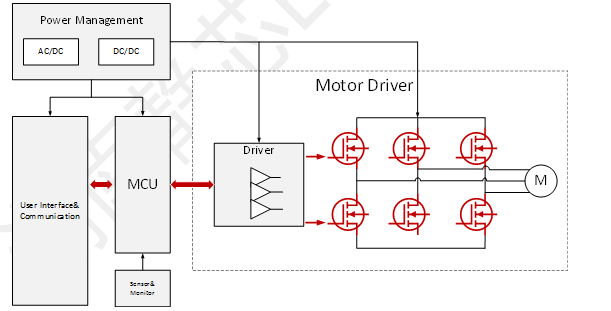
相比之下,伺服電機(jī)是一種具有反饋控制的電動(dòng)機(jī),可以精確地控制轉(zhuǎn)速和位置。伺服電機(jī)通常由電動(dòng)機(jī)、編碼器和驅(qū)動(dòng)器組成。編碼器用于測(cè)量電機(jī)的位置和速度,并向控制系統(tǒng)提供反饋信號(hào),以實(shí)現(xiàn)閉環(huán)控制。驅(qū)動(dòng)器負(fù)責(zé)向電機(jī)提供所需的電流和電壓,以實(shí)現(xiàn)精確的控制。伺服電機(jī)的優(yōu)點(diǎn)是響應(yīng)速度快、控制精度高,適用于對(duì)位置和速度要求較高的應(yīng)用,如自動(dòng)化生產(chǎn)線、機(jī)器人和醫(yī)療設(shè)備等。
盡管PMAC和伺服電機(jī)在控制機(jī)械系統(tǒng)方面具有相似的功能,但它們?cè)谝恍┓矫娲嬖诓町悺J紫龋琍MAC是一個(gè)可編程的控制器,可以根據(jù)應(yīng)用的需求進(jìn)行定制和配置。它具有靈活性和可擴(kuò)展性,可以輕松地適應(yīng)不同的應(yīng)用場(chǎng)景。相比之下,伺服電機(jī)的控制通常是由驅(qū)動(dòng)器和控制器硬件直接實(shí)現(xiàn)的,更適用于簡(jiǎn)單的控制任務(wù)。
其次,PMAC提供了豐富的運(yùn)動(dòng)控制功能,如路徑規(guī)劃、插補(bǔ)和同步控制等。這使得PMAC可以實(shí)現(xiàn)復(fù)雜的運(yùn)動(dòng)路徑和運(yùn)動(dòng)規(guī)劃,如曲線插補(bǔ)和點(diǎn)對(duì)點(diǎn)移動(dòng)等。伺服電機(jī)的控制功能相對(duì)較少,通常只能實(shí)現(xiàn)簡(jiǎn)單的位置和速度控制。
此外,PMAC通常使用更先進(jìn)的控制算法和技術(shù),如模型預(yù)測(cè)控制(MPC)和自適應(yīng)控制等,以提高控制性能和系統(tǒng)的魯棒性。伺服電機(jī)的控制算法相對(duì)簡(jiǎn)單,主要是利用PID控制器來實(shí)現(xiàn)位置和速度的閉環(huán)控制。
然而,PMAC也存在一些不足之處。首先,由于其復(fù)雜性和可編程性,PMAC通常需要更多的工程師和技術(shù)人員來進(jìn)行配置、調(diào)試和維護(hù)。相比之下,伺服電機(jī)的安裝和調(diào)試相對(duì)簡(jiǎn)單,不需要太多的專業(yè)知識(shí)。
另外,PMAC的成本通常較高,特別是對(duì)于較小規(guī)模的應(yīng)用來說。相比之下,伺服電機(jī)的成本相對(duì)較低,適用于各種規(guī)模的應(yīng)用。
綜上所述,PMAC和伺服電機(jī)在功能和應(yīng)用方面存在一些差異。PMAC具有高度靈活性和可編程性,適用于復(fù)雜的運(yùn)動(dòng)控制應(yīng)用;伺服電機(jī)具有較高的控制精度和響應(yīng)速度,適用于對(duì)位置和速度要求較高的應(yīng)用。在選擇PMAC或伺服電機(jī)時(shí),需要考慮應(yīng)用的特點(diǎn)、控制要求和成本等因素。
-
伺服電機(jī)
+關(guān)注
關(guān)注
87文章
2100瀏覽量
59140 -
PMAC
+關(guān)注
關(guān)注
4文章
22瀏覽量
16579
發(fā)布評(píng)論請(qǐng)先 登錄
伺服電機(jī)靜電防護(hù)完整方案





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論