 rs和sr觸發器的工作原理 為什么rs觸發器可以消除機械抖動
rs和sr觸發器的工作原理 為什么rs觸發器可以消除機械抖動

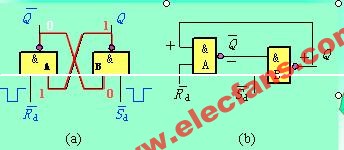
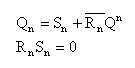
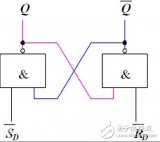
RS觸發器與SR觸發器都是基本的數字邏輯電路元件,常用于存儲、控制和時序電路中。它們的工作原理如下:
1.RS觸發器:
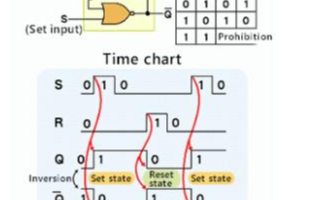
*當輸入端R和S都為高電平時,RS觸發器保持上一個狀態不變。
*當R為低電平,S為高電平時,Q為高電平,Q’為低電平。這將觸發觸發器進入“置位”狀態。
*當S為低電平,R為高電平時,Q為低電平,Q’為高電平。這將觸發觸發器進入“復位”狀態。
*當R和S同時為高電平時,觸發器進入禁止狀態,輸出無效,狀態不確定。
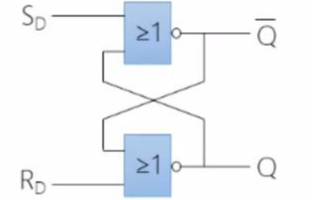
2.SR觸發器:
*當S和R都為高電平時,SR觸發器保持上一個狀態不變。
*當S為高電平,R為低電平時,Q為高電平,Q’為低電平。這將觸發觸發器進入“置位”狀態。
*當R為高電平,S為低電平時,Q為低電平,Q’為高電平。這將觸發觸發器進入“復位”狀態。
*當S和R同時為低電平時,觸發器進入禁止狀態,輸出無效,狀態不確定。
RS觸發器和SR觸發器的區別:
1.輸入條件:RS觸發器的置位和復位操作僅與R和S兩個輸入信號有關;而SR觸發器的置位和復位操作不僅與S和R有關,還與Q和Q’的狀態有關。
2.輸出狀態:在某些輸入條件下,RS觸發器會進入禁止狀態,導致輸出狀態不確定;而SR觸發器在某些輸入條件下會直接進入禁止狀態,但輸出狀態始終是確定的。
3.抗干擾性:由于RS觸發器可以消除機械抖動的影響,因此在某些應用中具有更好的抗干擾性。
為什么RS觸發器可以消除機械抖動:
機械抖動通常是由于觸點的機械運動產生的短暫的、重復的信號跳動。在某些應用中,如開關的觸點或按鈕的機械運動可能導致信號的短暫跳動,這種跳動可能導致電路的誤動作。
而RS觸發器的工作原理可以有效地消除這種機械抖動的影響。當輸入信號R或S發生變化時,無論這個變化是由于真實的信號變化還是由于機械抖動引起的,RS觸發器都會根據相應的條件進行置位或復位操作。
這種快速響應的特性使得RS觸發器能夠有效地消除由機械抖動引起的信號干擾,從而提高電路的穩定性和可靠性。
總的來說,RS和SR觸發器是數字電路中的基本元件,它們的工作原理和應用各有特點。RS觸發器由于其獨特的消除機械抖動的功能,在某些應用中具有更好的穩定性和可靠性。然而,具體的選擇和應用還需要根據實際需求進行考慮。
-
信號干擾
+關注
關注
0文章
113瀏覽量
46275 -
RS觸發器
+關注
關注
3文章
101瀏覽量
18452 -
SR觸發器
+關注
關注
0文章
13瀏覽量
12810 -
數字邏輯電路
+關注
關注
0文章
106瀏覽量
16111 -
高電平
+關注
關注
6文章
203瀏覽量
22042
發布評論請先 登錄

RS觸發器工作原理_RS觸發器邏輯功能_RS觸發器和SR觸發器的區別
RS觸發器是什么?解讀rs觸發器的作用和數字電路中的rs觸發器的作用





 工商網監
工商網監
評論