 四旋翼無人機飛行原理【其利天下無人機方案開發】
四旋翼無人機飛行原理【其利天下無人機方案開發】
近年來,無人機憑借其在多個領域的便捷應用,掀起了一場迅猛的發展潮流。尤其在當今世界的多場戰爭中,無人機的嶄新戰術運用達到了淋漓盡致的高潮,成為軍事領域的璀璨之星。
 其利天下無人機
其利天下無人機無人機行業的近年蓬勃發展,宛如一片璀璨的新星匯聚成的輝煌星空。創新和科技的融合將無人機推向生活的前沿,成為引領時代的先鋒。這是一場風起云涌的科技巨變,為我們描繪出了一個嶄新而引人入勝的無人機時代。
下面我們針對生活中常見的四旋翼無人機的飛行原理做個基礎的介紹。
一:四旋翼無人機的兩種結構模型介紹
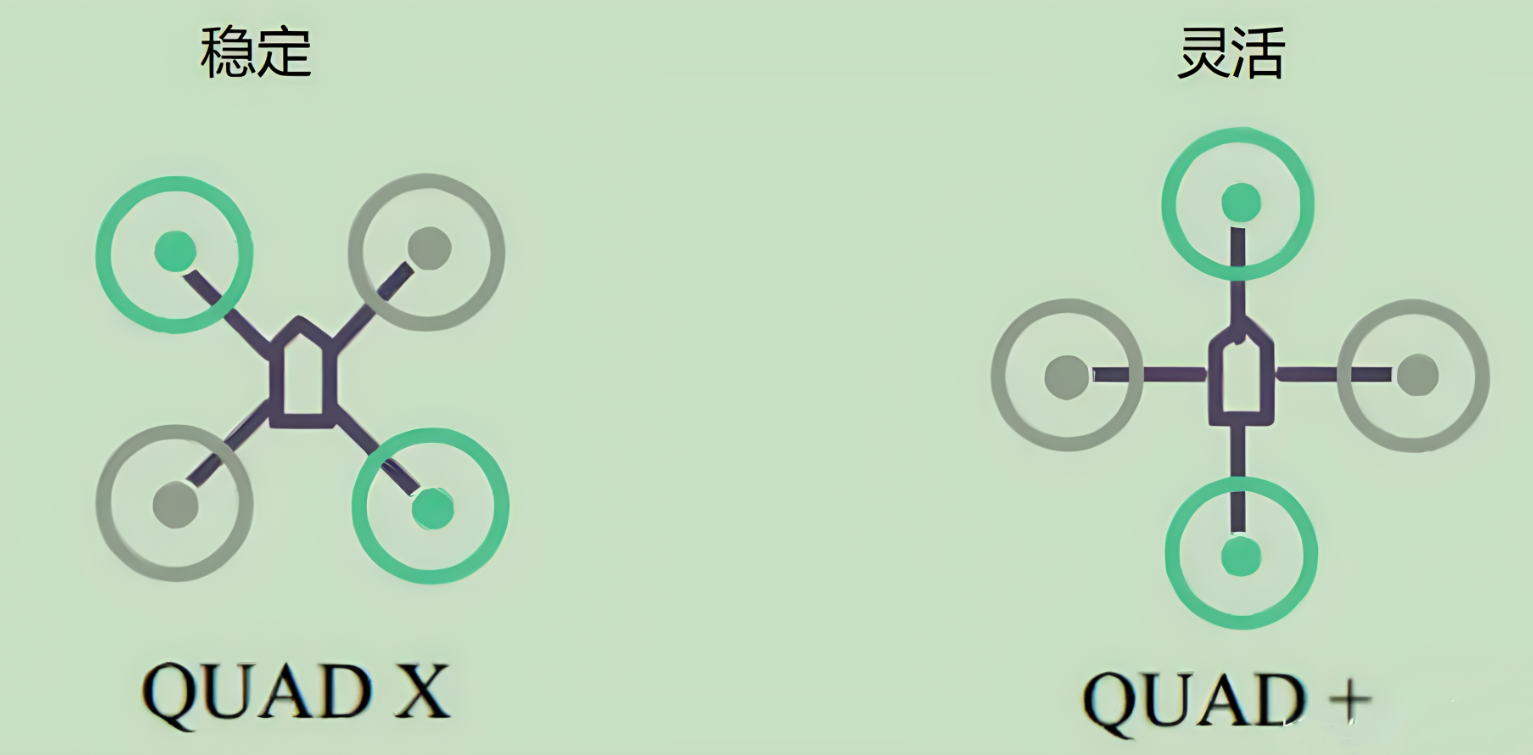
一般情況下,根據四旋翼無人機上馬達分部的相對位置將四旋翼無人機分為如下兩種結構模式
“×”字模式: Pitch和 Roll與1,3、2,4兩組電機呈 45°夾角 。
“十”字模式: Pitch對應2,4電機的對軸,Roll對應1,3電機的對軸,夾角為0。
 四旋翼無人機結構模式
四旋翼無人機結構模式一般的無人機基本都采用“X”字模式的結構。“X”型無人機優點是控制靈活,同樣是俯仰運動中,“x”型無人機需要控制四個電機;具體表現為,前兩個電機轉速同時增大(減小),后兩個電機轉速同時減小(增大)。因為其運動是四個電機轉速同時變化,運動(俯仰運動)的合力來源于四個電機(“+”型只有前后兩個電機提供力),所以其運動的加速度更快,運動更加靈活。但是同樣,控制四個電機使飛行器穩定的難度要大于控制兩個電機,所以控制難度高是“X”型無人機一個缺點。鑒于現階段商業飛控,開源飛控都已經有很成熟的算法控制飛行器穩定飛行,且“X”型飛行器易于懸掛云臺,所以市面上的四軸飛行器絕大部分都是“X”型或“H”型,很少看到有“+”型。
“H”型無人機類似于“X”型,這里就不過多贅述了。只講其一個缺點,“H”型無人機因為物理結構問題,其飛行器的腰部很容易扭折,所以市面上的“H”型無人機都會對腰部進行加固,但是如果操作不當,還是容易損壞。
“+”型的四軸飛行器因為其電機布局和兩個姿態角(俯仰角和翻滾角)重合,其控制難度較小。舉個例子,“+”型飛行器想要進行俯仰運動時,只需控制前后兩個電機的轉速,左右電機轉速保持不變即可,所以其控制飛行器穩定的難度較小,相對來說易于控制。
二:四旋翼飛行器的6個自由度介紹
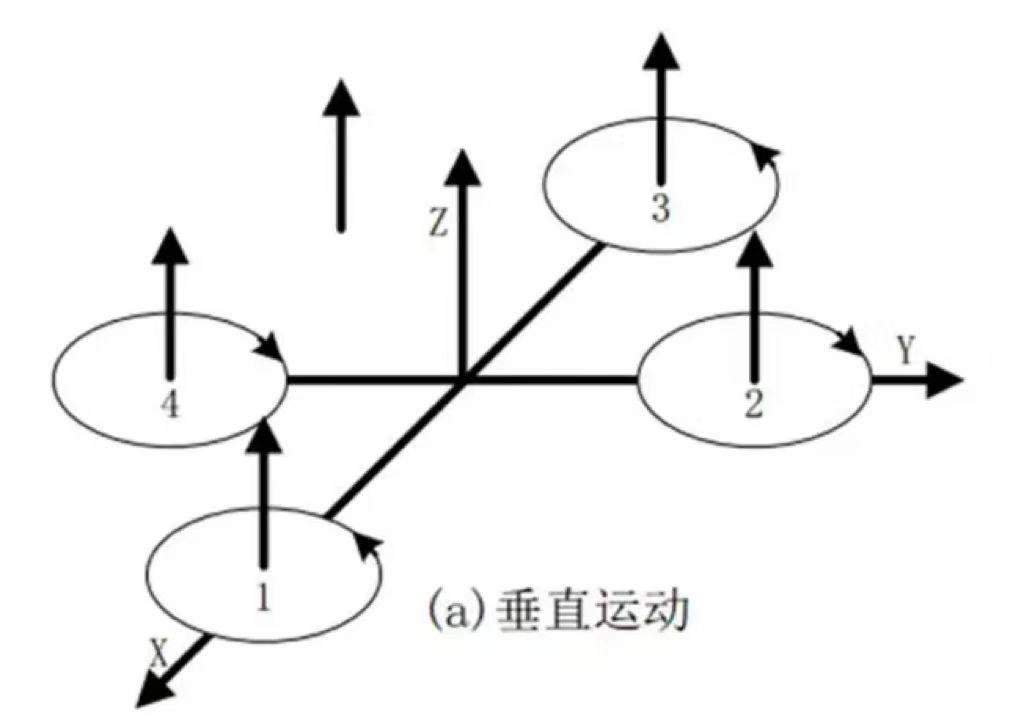
四旋翼飛行器的旋翼結構如圖a所示。飛行時,以1號電機為機頭,3號電機為機尾,2號和4號電機分別位于機身的左、右側。當飛行器平衡飛行時,電機1和電機3逆時針旋轉的同時,電機2和電機4順時針旋轉以抵消電機在高速旋轉時產生的陀螺效應和空氣動力扭矩效應使飛行器發生自旋。四旋翼飛行器在空間共有6個自由度(分別沿3個坐標軸作平移和旋轉動作),對每個自由度的控制我們都可以通過調節不同電機的轉速來實現。下面逐個說明飛行器的各種飛行姿態。
(1)垂直運動
 垂直運動時無人機受力分析圖
垂直運動時無人機受力分析圖如圖a,1號和3號電機逆時針旋轉,2號和4號電機順時針旋轉來平衡其對機身的反扭矩。如果同時增加四個電機的轉速(圖中各個電機中心引出的向上箭頭表示加速,若箭頭向下表示減速),每個電機帶動螺旋槳產生更大的升力,當合力足以克服整機的重量時,四旋翼飛行器便離地垂直上升;反之,同時減小四個電機轉速,四旋翼飛行器則垂直下降,當旋翼產生的升力等于飛行器的自重且無外界干擾時,飛行器便可保持懸停狀態。
(2)俯仰運動
如圖b所示,電機1的轉速上升,電機3的轉速下降,電機2、電機4的轉速保持不變(圖中各個電機中心引出的向上箭頭表示加速,若箭頭向下表示減速,沒有箭頭表示速度不變)。由于旋翼1的升力上升,旋翼3的升力下降,產生的不平衡力矩使機身繞Y軸旋轉(方向如圖b所示)。同理,當電機1的轉速下降,電機3的轉速上升時,機身便繞Y軸反方向旋轉。實現了飛行器的俯仰運動。
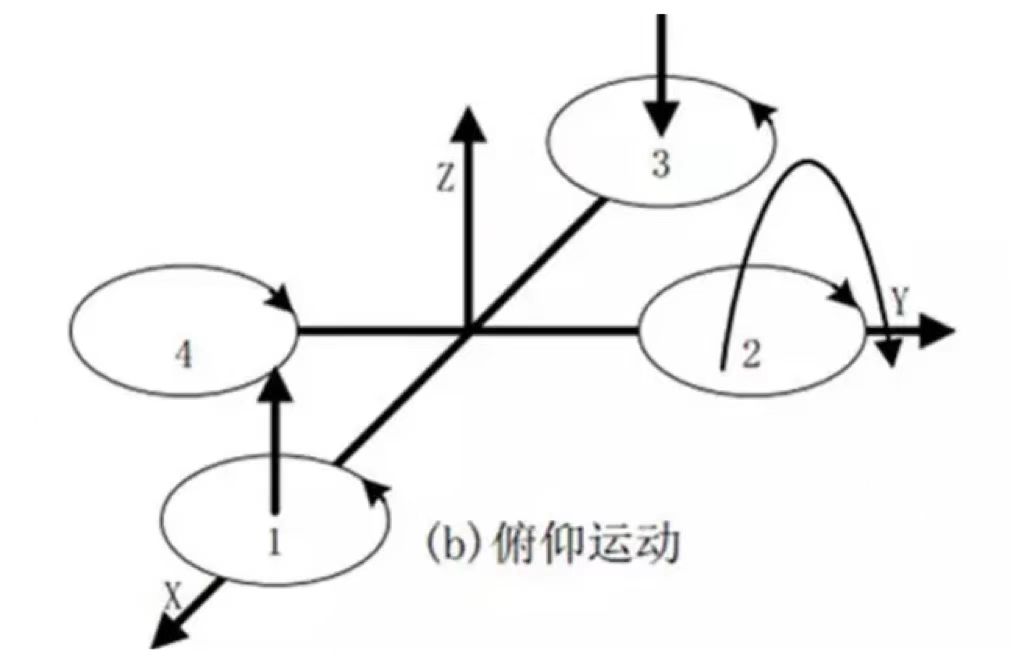 俯仰運動時無人機受力分析圖
俯仰運動時無人機受力分析圖(3)滾轉運動
與圖b的原理相同,在圖c中,改變電機2和電機4的轉速,保持電機1和電機3的轉速不變,則可使機身繞X軸旋轉(正向和反向),實現飛行器的左右滾轉運動。
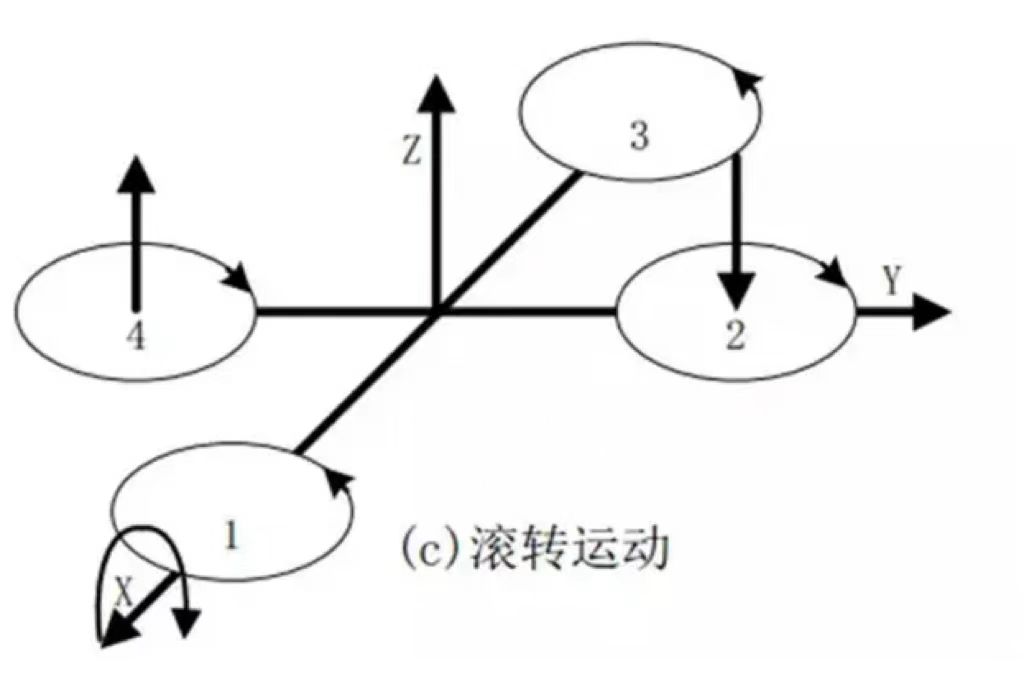 滾轉運動時無人機受力分析圖
滾轉運動時無人機受力分析圖(4)偏航運動
如圖d所示,四旋翼飛行器偏航運動就是繞自身垂直軸Z軸旋轉,可以借助旋翼產生的反扭矩來實現。旋翼轉動過程中由于空氣阻力作用會形成與轉動方向相反的反扭矩。為了克服反扭矩的影響,可使四個旋翼中的兩個正轉,兩個反轉,且對角線上的電機轉動方向相同。反扭矩的大小與旋翼轉速有關,當四個電機轉速相同時,四個旋翼產生的反扭矩相互平衡,四旋翼飛行器不發生轉動;當四個電機轉速不完全相同時,不平衡的反扭矩會引起四旋翼飛行器轉動。
在圖d中,當電機1和電機3的轉速上升,電機2和電機4的轉速下降時,旋翼1和旋翼3對機身的反扭矩大于旋翼2和旋翼4對機身的反扭矩,機身便在不平衡反扭矩的作用下繞Z軸轉動,實現飛行器的偏航運動,轉向與電機1、電機3的轉向相反。
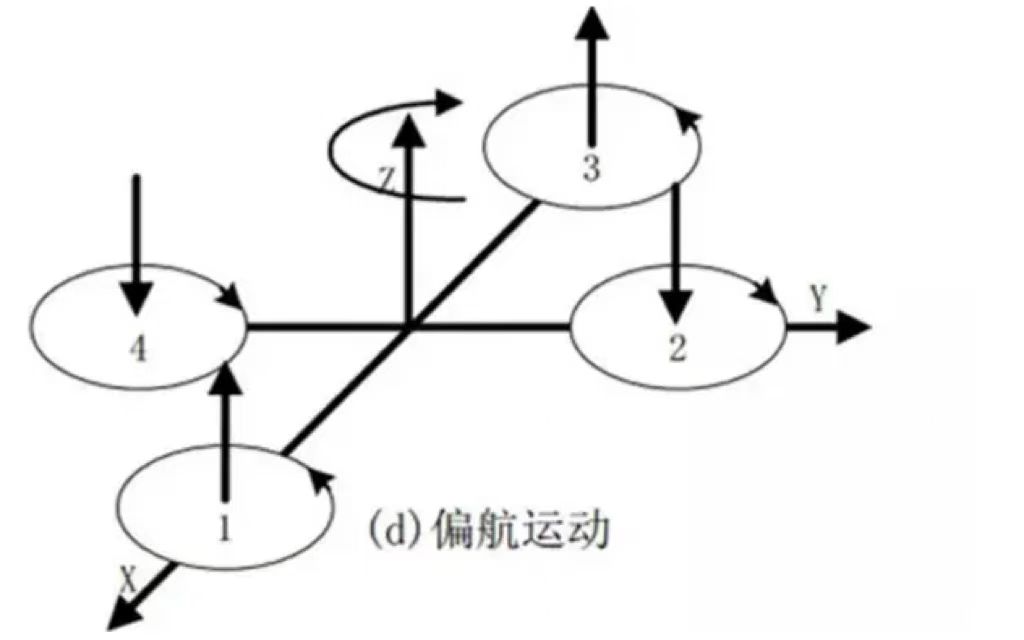 偏航運動時無人機受力分析圖
偏航運動時無人機受力分析圖(5)前后運動
如圖e所示,增加電機3轉速,使尾部拉力增大;相應減小電機1轉速,使頭部拉力減小;同時保持其它兩個電機轉速不變,反扭矩仍然要保持平衡。按圖b的理論,飛行器首先發生一定程度的傾斜,從而使旋翼拉力產生水平分量,因此可以實現飛行器的前飛運動(向后飛行與向前飛行正好相反)。當然在圖b,圖c中,飛行器在產生俯仰、翻滾運動的同時也會產生沿X、Y軸的水平運動。
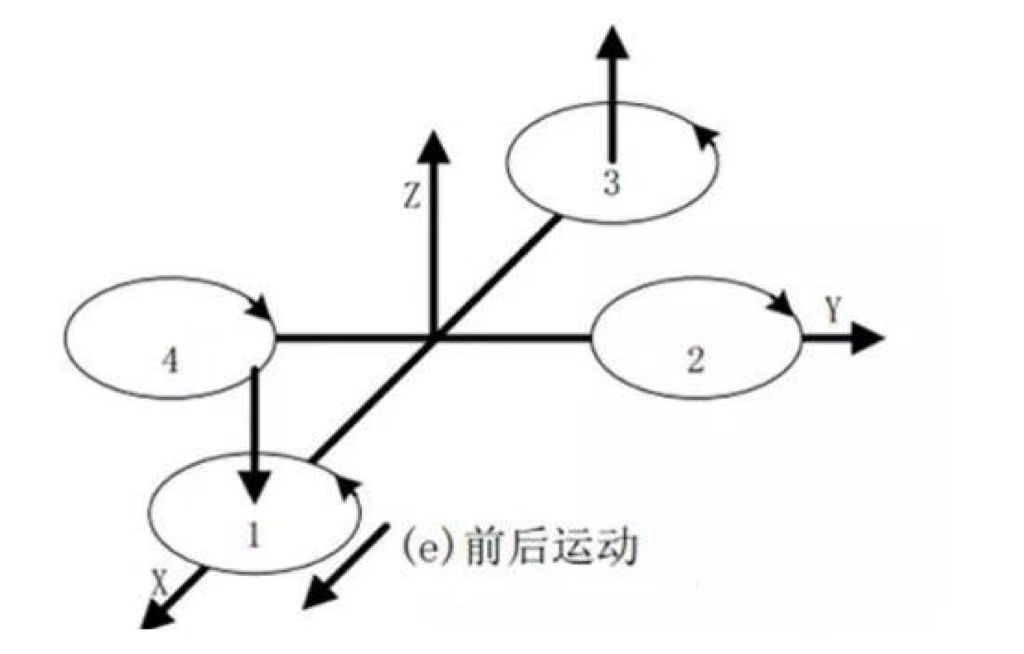 前后運動時無人機受力分析圖
前后運動時無人機受力分析圖(6)側向運動
在圖f中,由于結構對稱,所以側向飛行的工作原理與前后運動完全一樣。
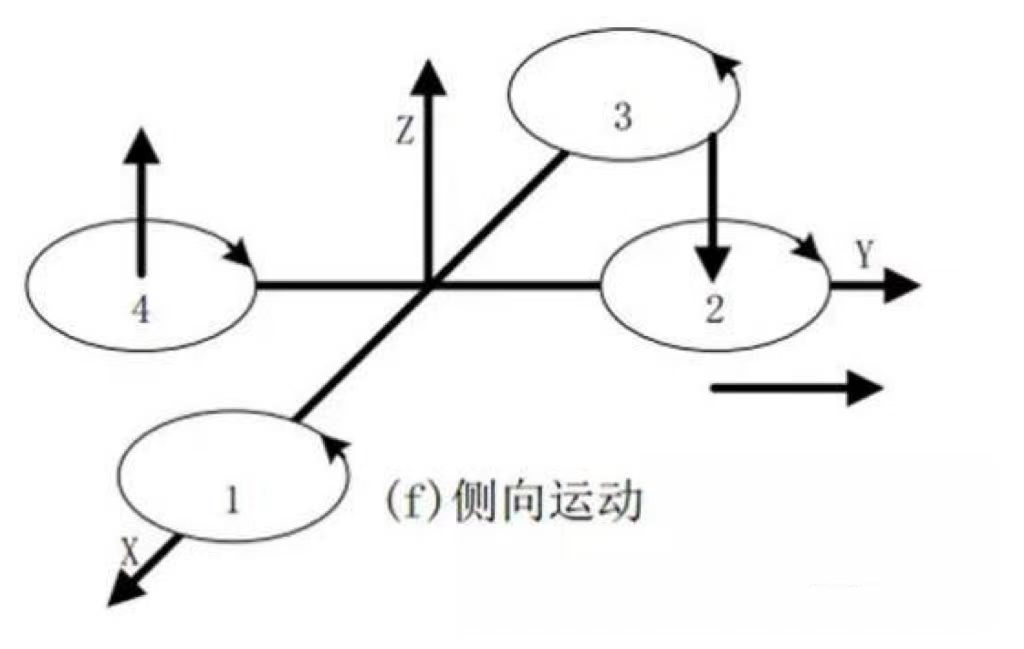 側向運動時無人機受力分析圖
側向運動時無人機受力分析圖 -
無人機
+關注
關注
230文章
10734瀏覽量
185542 -
MCU板
+關注
關注
0文章
26瀏覽量
6545 -
人工智能算法
+關注
關注
0文章
62瀏覽量
5485
發布評論請先 登錄
《手把手教你做星閃無人機—KaihongOS星閃無人機開發實戰》系列課程課件匯總
無人機飛行控制器的組成部件和工作原理

無人機的類型多種多樣,不同類型的無人機由于其功能、飛行環境和任務需求的差異,對鋰電池也有不同的特

DIY了一臺無人機,用全志T113芯片
開源項目!DIY了一臺無人機,用全志T113芯片
無人機飛行仿真模擬訓練系統
無人機機載高光譜成像系統的應用及優勢
知語科技無人機反制系統的應用與挑戰





 工商網監
工商網監
評論