") 用FPGA實(shí)現(xiàn)GNSS RF接收器-用于衛(wèi)星的精確定位設(shè)計(jì)
用FPGA實(shí)現(xiàn)GNSS RF接收器-用于衛(wèi)星的精確定位設(shè)計(jì)
概念
全球?qū)Ш叫l(wèi)星系統(tǒng)(英文:Global Navigation Satellite System,GNSS ),又稱全球衛(wèi)星導(dǎo)航系統(tǒng),是能在地球表面或近地空間的任何地點(diǎn)為用戶提供全天候的3維坐標(biāo)和速度以及時(shí)間信息的空基無線電導(dǎo)航定位系統(tǒng)。其包括一個(gè)或多個(gè)衛(wèi)星星座及其支持特定工作所需的增強(qiáng)系統(tǒng)。
全球衛(wèi)星導(dǎo)航系統(tǒng)國際委員會(huì)公布的全球4大衛(wèi)星導(dǎo)航系統(tǒng)供應(yīng)商,包括中國的北斗衛(wèi)星導(dǎo)航系統(tǒng)(BDS)、美國的全球定位系統(tǒng)(GPS)、俄羅斯的格洛納斯衛(wèi)星導(dǎo)航系統(tǒng)(GLONASS)和歐盟的伽利略衛(wèi)星導(dǎo)航系統(tǒng)(GALILEO)。
開源、低成本、高效、高性能的GNSS接收
本文主角是一個(gè)名為NUT2NT+ 的開源硬件+軟件的一體化平臺(tái)。
NUT2NT+是一款圍繞 NT1065 芯片構(gòu)建的開源、多頻率、多信號(hào)前端 GNSS 接收器板。它是一款低功耗、低成本、全 GNSS 射頻接收器,適合衛(wèi)星導(dǎo)航愛好者。
開源
NUT2NT+ 硬件和軟件都是開源的 - 使用戶能夠設(shè)置接收器的模式和頻率,連續(xù)捕獲所有信號(hào),并完全控制主要處理功能。
功能齊全
NUT2NT+ 旨在最大限度地提高靈活性。
遵循所有 GNSS 標(biāo)準(zhǔn):GPS、GLONASS、Galileo、BeiDou、IRNSS 和未來標(biāo)準(zhǔn)
接收所有 GNSS 頻段:L1/L2/L3/L5、G1/G2/G5、B1/B2、E1/E5 和未來頻段
高吞吐量數(shù)據(jù)流:通過 USB 3.0 Type-C 連續(xù)傳輸高達(dá) 50 MB/秒
快速處理:使用 FPGA 進(jìn)行數(shù)據(jù)處理
開源軟件:用于頻譜和 GNSS 信號(hào)監(jiān)測
低功耗:通過 USB 供電: 5 V @ 0.3 A
小尺寸:主板尺寸為 100 mm x 50 mm x 10 mm
Power injector circuit:適用于具有直流短路的天線,例如偶極子或 PIFA。該電路可由軟件控制。
應(yīng)用領(lǐng)域
NUT2NT+ 的靈活性具備無限的用途 - 例如:
用于自動(dòng)駕駛的 GNSS 傳感器
帶有RA125 天線的NUT2NT+可用作自動(dòng)駕駛汽車的精確定位 GNSS 接收器。如今,自動(dòng)駕駛汽車配備了強(qiáng)大的處理平臺(tái),例如 NVIDIA Drive PX2。憑借 NUT2NT+ 的處理能力,所有需要 MIPS 的 GNSS 接收器任務(wù)都可以在軟件中完成。
帶有RA125 天線的NUT2NT+可以連接到ROCK64等小尺寸、低成本的嵌入式平臺(tái)。可以連續(xù)捕獲所有GNSS信號(hào)樣本,而不會(huì)造成任何損失,可以在記錄儀外部進(jìn)行離線下載和處理。它可用于事故重建或 GNSS 反射測量。
系統(tǒng)框圖
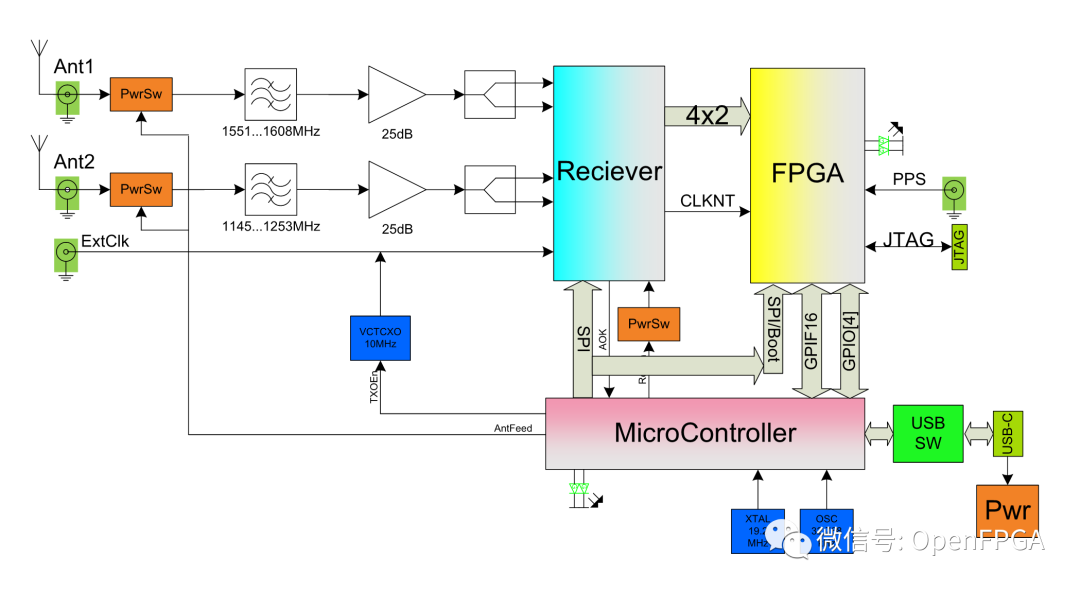
NUT2NT+ 硬件
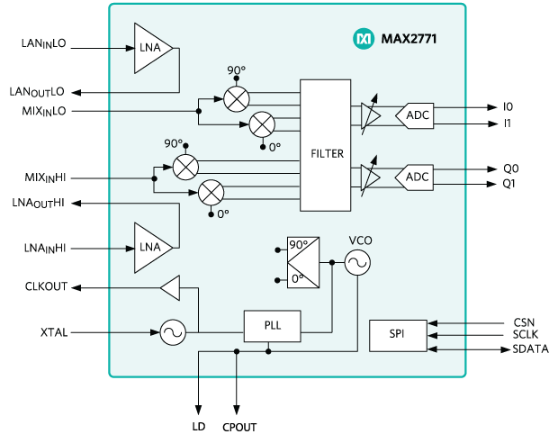
接收芯片:NT1065
USB 3.0控制器:CYUSB3014,支持USB 2.0模式
USB 連接器:USB 3.1 Type-C
Lattice ECP5 FPGA:12K LUT + 28 DSP 模塊 (LFE5U-12)
時(shí)鐘:10 MHz TCXO,焊接
射頻輸入:兩個(gè),頻段專用
RF 輸入:參考本底噪聲 - 5 dB
ADC分辨率:兩位
ADC 頻率:高達(dá) 99 MHz
樣本傳輸:連續(xù)全流,從 10 到 50 Mbytes/sec
功耗:5 V @ 0.3 A,來自 USB
尺寸:100毫米×50毫米×10毫米
GNSS 標(biāo)準(zhǔn):GPS、GLONASS、Galileo、BeiDou、IRNSS 和未來標(biāo)準(zhǔn)
所有 GNSS 頻段:L1/L2/L3/L5、G1/G2/G5、B1/B2、E1/E5 和未來頻段
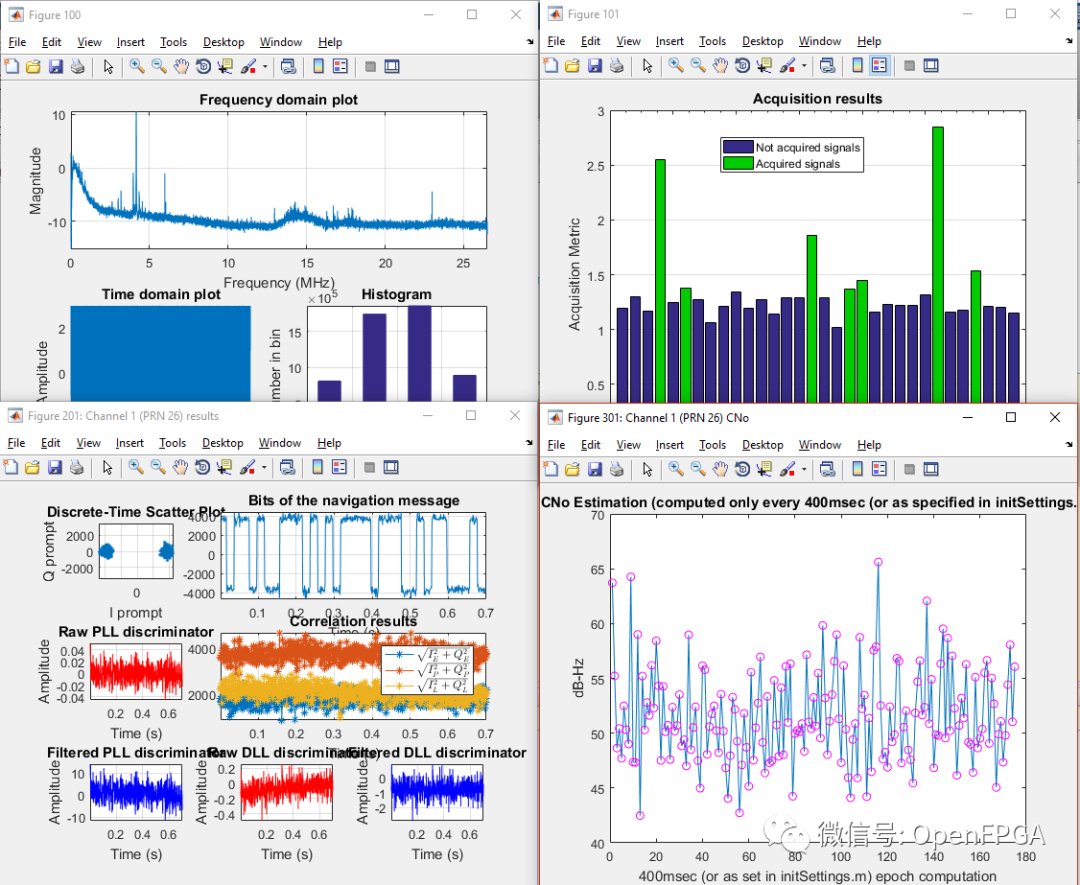
NUT2NT+軟件
軟件源代碼可在GitHub上獲取(文末)。該軟件包括:
信號(hào)轉(zhuǎn)儲(chǔ)器(抓取器)軟件,
頻譜分析儀軟件,
支持 libusb API
支持原生 Cypress 驅(qū)動(dòng)程序 API
適用于 Windows、Linux 以及可能包含 libusb 的所有其他操作系統(tǒng)
GPS L1、GLONASS L1/L2 衛(wèi)星信號(hào)相關(guān)示例
GNURadio 支持和示例頻譜視圖 GNURadio 應(yīng)用程序
GNSS-SDR 支持,通過 GPS 和 GLONASS L1 信號(hào)進(jìn)行實(shí)時(shí)測試并使用捕獲的樣本文件進(jìn)行測試
GitHub上的 FPGA 源代碼
賽普拉斯 USB 控制器固件
審核編輯:劉清
-
FPGA
+關(guān)注
關(guān)注
1643文章
21967瀏覽量
614261 -
接收器
+關(guān)注
關(guān)注
15文章
2563瀏覽量
73405 -
GNSS
+關(guān)注
關(guān)注
9文章
844瀏覽量
49053 -
RF接收器
+關(guān)注
關(guān)注
1文章
6瀏覽量
7795
原文標(biāo)題:用FPGA實(shí)現(xiàn)四通道、全頻率 GNSS RF 接收器-用于衛(wèi)星的精確定位
文章出處:【微信號(hào):Open_FPGA,微信公眾號(hào):OpenFPGA】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
采用GNSS天線模塊設(shè)計(jì)衛(wèi)星定位系統(tǒng)
如何快速實(shí)現(xiàn)定位的多星座GNSS模塊,其原理是怎樣的
無人駕駛的GNSS系統(tǒng)中高精度定位定向模組M22如何實(shí)現(xiàn)定位導(dǎo)航

無人機(jī)的GNSS導(dǎo)航系統(tǒng)高精度定位定向模組M20D實(shí)現(xiàn)應(yīng)急救援技術(shù)原理

求2.4Ghz的RF接收器的IC
意法半導(dǎo)體推出世界首個(gè)定位精度達(dá)到自動(dòng)駕駛級(jí)別且符合汽車安全標(biāo)準(zhǔn)的多頻GNSS接收器
基于NEO-M8N GNSS接收器模塊的GNSS 5 CLICK板確定當(dāng)前位置
GNSS 多星定位原理及校正方式對(duì)比
適用于基于位置應(yīng)用的GNSS接收器IC
GNSS接收機(jī)的干擾源討論

高精度GNSS定位定向模組M20D實(shí)現(xiàn)無人配送車導(dǎo)航定位的原理

gnss定位的基本原理
制定全面測試計(jì)劃:使用TS-GNSS模擬器助力接收器選擇






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論