 永磁同步電動機—最大轉矩電流比控制
永磁同步電動機—最大轉矩電流比控制
1
前言
永磁同步電動機的矢量控制,在轉矩解耦階段,往往采用id=0的方式,此時轉矩與dq軸電流解耦,具有計算簡單的特點。
然而在這種控制方式下,由于d軸電流恒定,沒有參與到控制中,忽略了磁阻轉矩的作用,使得逆變器的容量沒有得到充分發揮,因此這種方法不適用于凸極永磁同步電動機控制系統。且由于永磁體磁鏈基本不變,因此只能滿足基速以下的調速策略。
因此,本文介紹一種新的d軸電流也參與控制的最大轉矩電流比(Maximum Torque Per Amphere,MTPA)控制。這種方法只需要最小的定子電流,能夠降低線路損耗,提高整體系統的工作效率。
2
轉矩解耦
MTPA與id=0控制方式均是體現在轉矩解耦上的,因此它的控制系統結構與id=0基本一致,區別僅在于轉矩對電流解耦方式的不同。
2.1 最大轉矩電流比
最大轉矩電流比,顧名思義,就是一種轉矩與電流矢量的比值為最大的一種控制方式。即在輸出相同轉矩條件下,電流最小。
結合前文提到過的轉矩公式,那么目標就是:

根據上述的目標,通過一系列推導,可以求得轉矩與q軸電流的關系,及q軸電流與d軸電流的關系,如下所示:

通過第一個公式,可以通過轉矩,求得q軸電流,
通過第二個公式,可以通過q軸電流,求得d軸電流。
這里有兩點說明:
1)上述公式雖然表示出了電機轉矩與定子電流的關系,但是必須反求出以Te為變量的id與iq的表達式,這個求解過程比較復雜,可以將轉矩與dq軸電流的關系制成表格,通過查表并進行曲線擬合的方法來求解這個問題。
2)另外,由于表面式永磁同步電動機的各向磁路對稱,沒有磁阻轉矩,交直軸電感相等(Ld=Lq),因此表面式永磁同步電動機的最大轉矩電流比控制與id=0的控制策略完全相同。
MATLAB畫個圖,大家可以直觀感受下凸極PMSM的MTPA與id=0控制的區別。

圖中橫縱坐標分別為dq軸電流,紅色虛線為恒轉矩曲線。
可以看出:若想要電動機輸出相同的轉矩,采用id=0的控制方式時,電流矢量為OA,MTPA控制時,電流矢量為OB。明顯看出OB長度小于OA,即MTPA控制下,所需要的定子電流最小。
2.2 良心公式推導
下面是最大轉矩電流比的推導過程,喜歡的可以學習,不喜歡的可直接忽略。先看個矢量圖:

圖中γ為定子電流的相位角,根據電流矢量關系式,有:

1)把上式帶入到電動機轉矩公式可得:

2)關于電流相位角的轉矩與電流的比值公式為:

3)對上述公式對電流相位角求導可得:

4)令上式為零可以求出電機轉矩與定子電流比值最大時的電流相位角:

可以解得:

進而有:

把 帶入到上式就可以得到前文給出的id與iq的表達式了。完成!!!
帶入到上式就可以得到前文給出的id與iq的表達式了。完成!!!
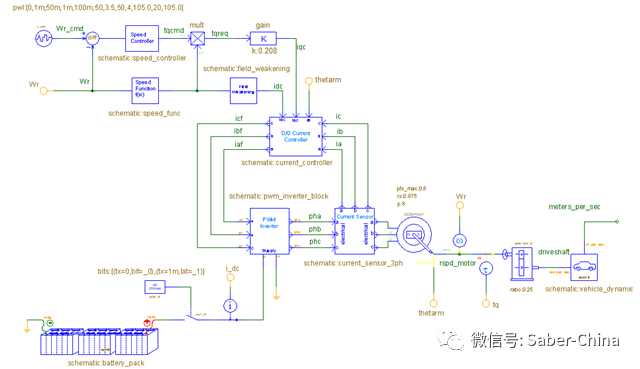
最后附上一個最大轉矩電流比控制系統的結構圖:

-
PMSM
+關注
關注
14文章
248瀏覽量
42487 -
永磁同步電動機
+關注
關注
14文章
75瀏覽量
12244 -
最大轉矩電流比
+關注
關注
0文章
2瀏覽量
1575
發布評論請先 登錄





 工商網監
工商網監
評論