") IFF系統(tǒng)的工作過程和關(guān)鍵技術(shù)
IFF系統(tǒng)的工作過程和關(guān)鍵技術(shù)
IFF系統(tǒng)
IFF系統(tǒng)是指敵我識別系統(tǒng),在軍用上第一種較為實用的IFF系統(tǒng)為Mark X系統(tǒng),但它最大的缺陷在于容易被地方欺騙,后來發(fā)展起來的Mark XⅡ增加了保密模式—4模式,4模式為軍用的加密識別模式,通過特定的加密算法和不斷更新的密鑰對識別信息進行加密,以防止信號被敵方破譯和欺騙。
現(xiàn)代外軍(主要指歐美)的IFF系統(tǒng)就包括了Mark X、Mark XⅡ、Mark XⅡA三種,其中Mark XⅡA為最新的IFF系統(tǒng)。
Mark XⅡ系統(tǒng)共有六種工作模式,分別為模式1,2,3/A,4,C,S模式(包含了之前Mark X系統(tǒng)的)。其中模式1,2,4模式專用于軍用識別,其它模式為軍民共用。而Mark XⅡA又增加了模式5模式,它們都是向下兼容的。
IFF系統(tǒng)的核心是二次監(jiān)視雷達(SSR),分為軍用和民用二次雷達,并由此在民航逐步發(fā)展起來了空中交通預(yù)警和防撞系統(tǒng)(TCAS)、廣播式自動相關(guān)檢測(ADS-B),其中ADS-B的空地數(shù)據(jù)鏈系統(tǒng)包括了VHF數(shù)據(jù)鏈模式(VDL4)、二次監(jiān)視雷達S模式(1090ES)、擴展電文和通用訪問收發(fā)機(UAT),是未來民航的主要空管進行“自由航路”的主要管理手段。
IFF系統(tǒng)的地面詢問機發(fā)射頻率為1030MHz,機載應(yīng)答機發(fā)射頻率為1090MHz,應(yīng)答機一般安裝在飛機機身的下部和機身的頂部,選擇其中一個信號較強天線進行發(fā)射,其天線具有一個水平全向方向圖,作用距離一般在300km左右。
工作過程
工作過程簡述如下:詢問機天線發(fā)射頻率1030MHz的指定詢問模式脈沖信號;應(yīng)答機接收到并確認(rèn)該詢問信號后,以對應(yīng)模式,通過全向天線發(fā)射頻率1090MHz的應(yīng)答脈沖信號。該應(yīng)答信號被詢問機天線接收到后,送往接收機和點跡錄取器,點跡錄取器檢測到飛機后再計算出飛機方位、距離,進行應(yīng)答信號解碼以確定飛機的識別碼和高度碼,然后將數(shù)據(jù)形成飛機報告,傳送至空管中心。
二次雷達按照詢問和識別處理方法的不同又劃分為空中交通管制雷達信標(biāo)系統(tǒng)(ATCRBS)和離散尋址信標(biāo)系統(tǒng)(DABS或模式S),通常前者稱為A/C模式或傳統(tǒng)模式,后者稱為S模式,也是第三代的二次雷達。
ATCRBS中,地面雷達不加區(qū)分地詢問和識別所有主波束駐留時間內(nèi)的飛機,可以識別飛機的代碼和高度,機載應(yīng)答機對無副瓣抑制要求的詢問提供應(yīng)答信標(biāo);DABS在主波束駐留時間內(nèi)則能點名詢問飛機的代碼和高度或傳遞管制/飛行管理信息,機載應(yīng)答機的功能需要與之配合提供應(yīng)答信標(biāo)。
關(guān)鍵技術(shù)
二次雷達的發(fā)射和接收體制為:傳統(tǒng)模式條件下,三詢問脈沖兩波束發(fā)射、單應(yīng)答脈沖三波束/三通道接收體制;S模式條件下,詢問脈沖為四個。
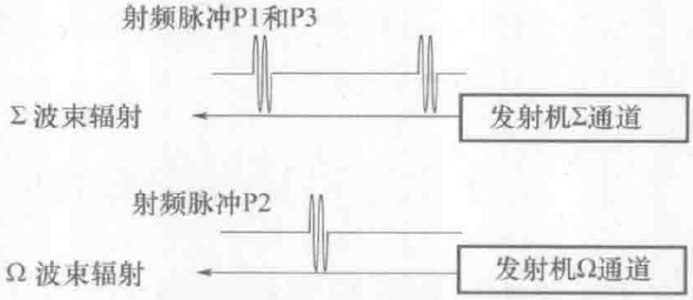
圖 1 傳統(tǒng)模式的三詢問脈沖兩波束發(fā)射示意圖
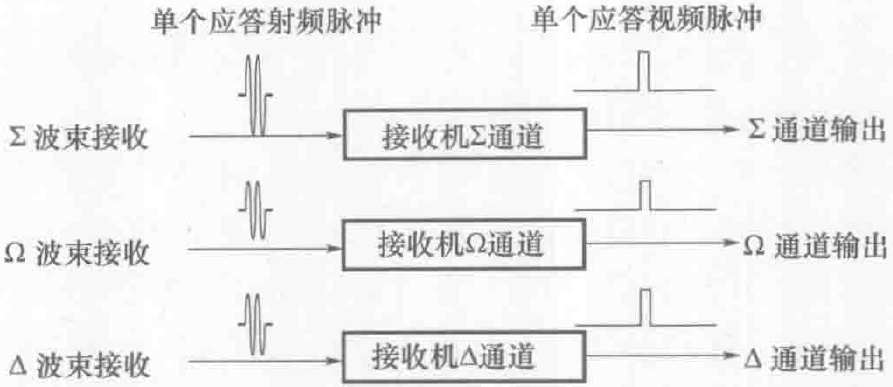
圖 2 傳統(tǒng)模式的單應(yīng)答脈沖三波束/三通道接收示意圖
傳統(tǒng)模式二次雷達中,脈沖P1+P3和脈沖P2分別由Σ波束和Ω波束向空中輻射,如圖 1所示;S模式二次雷達中,脈沖P1+P2+P6和脈沖P5分別由Σ波束和Ω波束向空中輻射。接收體制采用Σ、Ω和Δ的三波束對應(yīng)三通道接收機分別對單個應(yīng)答脈沖同時接收(單脈沖體制),如圖 2所示。
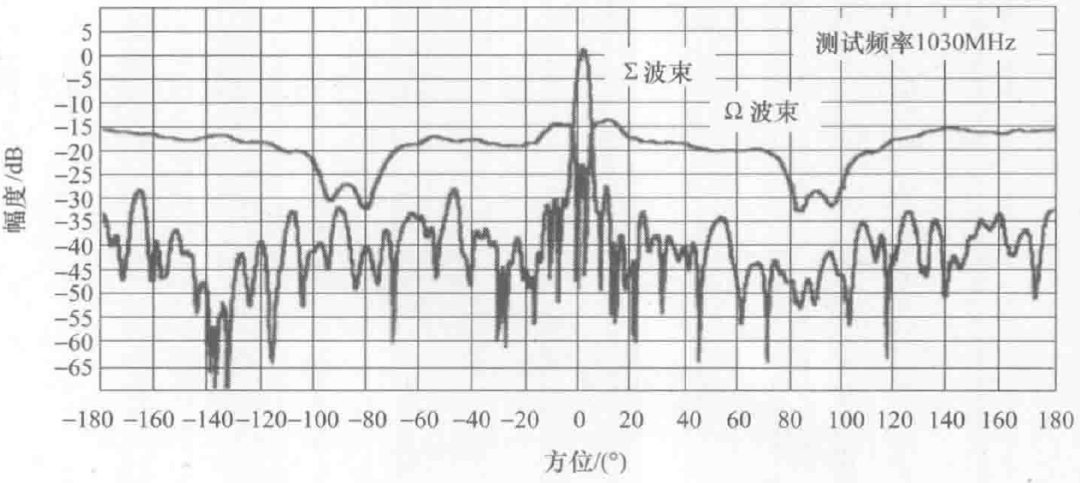
圖 3 Σ波束/Ω波束水平方向圖
上圖 3是實測的Σ波束/Ω波束水平方向圖,可見除了在Σ波束的主瓣方位外,在其它方位上Ω波束的增益均超過Σ波束的增益。
Ω波束和Σ波束
Ω波束和Σ波束的配合使用有兩個目的:一是詢問過程中用于抑制副瓣方位的應(yīng)答機對詢問的應(yīng)答,稱為詢問副瓣抑制(ISLS)。具體過程是:脈沖P1和P3由Σ波束輻射,脈沖P2由Ω波束輻射,脈沖P1、P2和P3的輻射功率相同,由于受Σ、Ω波束天線不同增益的調(diào)制,使得對于天線波束瞄準(zhǔn)軸的不同方位上脈沖功率比值P1/P2不同。
應(yīng)答機接收到這些脈沖后,比較P1和P2的相對幅度,可判斷出這些詢問脈沖是從詢問機天線副瓣方位接收到的(P2>P1),還是從主瓣方位接收到的(P1>P2)。民航標(biāo)準(zhǔn)為:P1>P2=9dB,必須應(yīng)答;P2>P1,不應(yīng)答;P1>P2=0~9dB,可應(yīng)答也可不應(yīng)答。所以P2也被稱為副瓣抑制脈沖或控制脈沖。
另一個目的是:在接收應(yīng)答的過程中用于抑制從副瓣方位接收到的應(yīng)答,稱為接收機副瓣抑制(RSLS)。具體過程是:利用連接天線Ω波束端口和Σ波束端口的對應(yīng)接收機Ω通道和Σ通道,比較接收機兩通道輸出端同一應(yīng)答脈沖信號的幅度,可判斷出該應(yīng)答脈沖的接收方位,只有位于天線主瓣方位上的應(yīng)答脈沖才會送到后續(xù)的應(yīng)答處理器,副瓣應(yīng)答脈沖在通過接收機時可被抑制,也稱為副瓣匿影。
審核編輯:湯梓紅
-
天線
+關(guān)注
關(guān)注
70文章
3268瀏覽量
141997 -
雷達
+關(guān)注
關(guān)注
50文章
3085瀏覽量
119456 -
識別系統(tǒng)
+關(guān)注
關(guān)注
1文章
148瀏覽量
19057
原文標(biāo)題:敵我識別系統(tǒng)基礎(chǔ)知識
文章出處:【微信號:雷達通信電子戰(zhàn),微信公眾號:雷達通信電子戰(zhàn)】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論