") LiDAR揭秘:“波長大辯論”的深入指導(dǎo)
LiDAR揭秘:“波長大辯論”的深入指導(dǎo)

作者:安森美(onsemi)汽車感知部總監(jiān)Bahman Hadji
人們普遍認(rèn)為,先進(jìn)駕駛輔助系統(tǒng)(ADAS)和自動駕駛(AD)之所以成功,是因為它們可以有效地感測車輛周圍的環(huán)境,并將感測到的信息輸入實現(xiàn)自動導(dǎo)航的算法中。考慮到在生死攸關(guān)的情況下對感測技術(shù)的絕對依賴性,系統(tǒng)通常使用多個傳感器模式,并實現(xiàn)數(shù)據(jù)融合,以增強(qiáng)彼此,并提供冗余。這樣每種技術(shù)都能發(fā)揮其優(yōu)勢,并提供更好的組合解決方案。
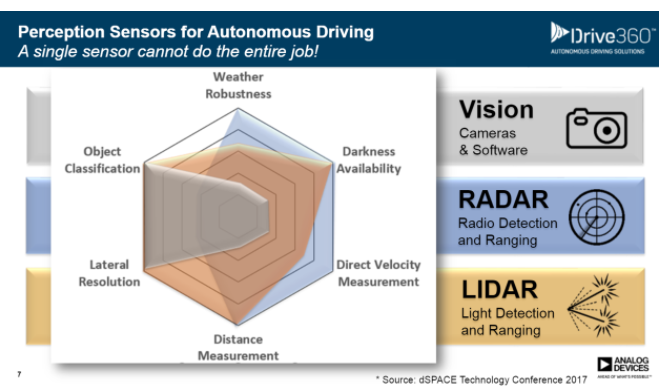
在未來ADAS和AD車輛中,傳感器主要有三種模式,分別是圖像傳感器、雷達(dá)和LiDAR。每一種傳感器都有自己的優(yōu)勢,它們可以組成一個完整的傳感器套件,通過傳感器融合并提供數(shù)據(jù)使自主感知算法能夠做出決策,為場景中的每一個點提供顏色、強(qiáng)度、速度和深度信息。
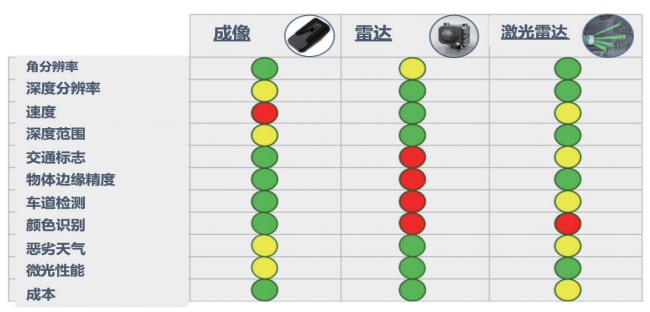
圖1:傳感器融合利用每種模式的優(yōu)勢提供有關(guān)車輛周圍環(huán)境的完整信息。
盡管早在幾十年前就出現(xiàn)了利用光測量距離的概念,但在這三種主要模式中,LiDAR是適用于大眾市場的新興商業(yè)化技術(shù)。由于需要完整傳感器套件的自動系統(tǒng)激增,汽車LiDAR市場將呈現(xiàn)驚人的增長,預(yù)計從2020年的3,900萬美元增長至2025年的17.5億美元(Yole Développement,2020 年)。這是一個巨大的商機(jī),專注于LiDAR技術(shù)的公司多達(dá)上百家,到2020年對這些公司的累計投資額已超過15億美元,而且這一數(shù)據(jù)源自2020年底多家LiDAR公司發(fā)起SPAC首次公開募股潮之前。但當(dāng)有這么多公司投身于同一項技術(shù),而且這項技術(shù)基于完全不同的光波長時(最突出的示例就是905 nm和1550 nm),最終總會有一種技術(shù)勝出,并整合其他技術(shù)的優(yōu)勢。就像我們一次次看到的那樣,網(wǎng)絡(luò)技術(shù)以太網(wǎng)、視頻技術(shù)VHS。
對于LiDAR技術(shù)用戶而言,即汽車制造商以及設(shè)計和制造客運和貨運自動機(jī)器人車輛的公司,他們首先要考慮的是自己的需求。最終,這些公司希望供應(yīng)商提供高度可靠的低成本LiDAR傳感器,同時滿足低反射率物體的測距和檢測性能規(guī)范要求。盡管所有工程師都有各自強(qiáng)烈的主張,但如果供應(yīng)商能夠以合適的成本滿足性能和可靠性要求,這些公司則可能并不知道實施的是何種技術(shù)。正因如此,才引起了本文旨在幫助理清的根本性辯論:哪種波長將在汽車LiDAR應(yīng)用中占據(jù)主導(dǎo)地位?
LiDAR 概述
要解決這個問題,首先需要了解LiDAR系統(tǒng)的結(jié)構(gòu)。LiDAR系統(tǒng)有不同的構(gòu)造。相干LiDAR,一種被稱為調(diào)頻連續(xù)波(FMCW)的LiDAR,將發(fā)射的激光信號與反射光混合,以計算物體的距離和速度。雖然FMCW具有一定的優(yōu)勢,但與最常見的LiDAR方法“直接飛行時間(dToF)LiDAR”相比,它仍屬于不太常用的方法。該技術(shù)測量超短光脈沖從照明光源發(fā)出,到達(dá)物體后反射回到傳感器所用的時間,達(dá)到測距的目的。它通過有關(guān)時間、速度和距離的簡單數(shù)學(xué)公式,利用光速來直接計算與物體的距離。盡管波長的選擇主要影響發(fā)射和接收功能,但典型的dToF LiDAR系統(tǒng)有六大硬件功能。
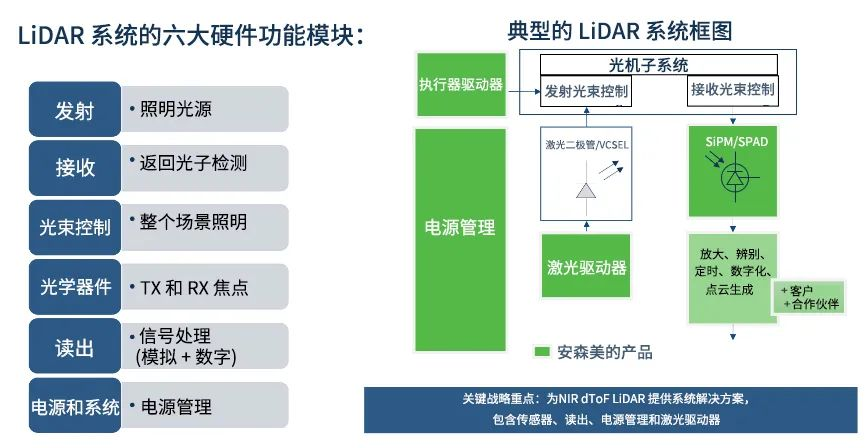
圖2:典型 dToF 系統(tǒng)框圖,綠色部分代表安森美產(chǎn)品的一些重點領(lǐng)域。
表1顯示了各種LiDAR制造商列表,從知名的一級汽車供應(yīng)商到世界各地的初創(chuàng)公司。市場報告和公開資料表明,絕大多數(shù)公司的LiDAR在近紅外(NIR)波長下工作,而不是短波紅外(SWIR)波長。此外,雖然專注于FMCW的SWIR LiDAR供應(yīng)商只能使用相應(yīng)波長,但大多數(shù)采用直接飛行時間實現(xiàn)的供應(yīng)商都可以選擇使用NIR波長來構(gòu)建系統(tǒng),同時還能夠利用其現(xiàn)有的IP相關(guān)功能,如波束控制和信號處理。
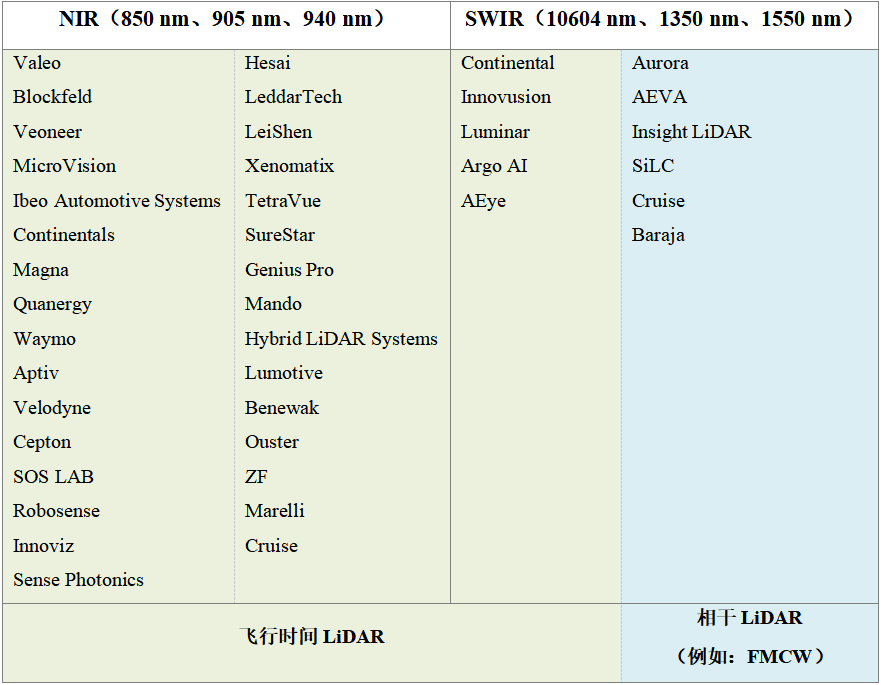
表1使用NIR和SWIR波長的LiDAR制造商列表
*上述列表并非詳盡無遺,數(shù)據(jù)來源 Yole、IHS Markit和公開資料
鑒于大多數(shù)制造商(而不是全部)都已選擇NI波長,他們是如何做出這一決定的?他們需要考慮的影響有哪些?本文重點討論與構(gòu)成LiDAR組件的光和半導(dǎo)體材料性質(zhì)有關(guān)的基礎(chǔ)物理學(xué)知識。
在LiDAR系統(tǒng)中,激光發(fā)射的光子到達(dá)物體后應(yīng)反射回來,然后被探測器接收。在此過程中,這些光子必須與來自太陽的周圍環(huán)境光子競爭。通過觀察太陽輻射光譜,并考慮大氣吸收因素,我們發(fā)現(xiàn)某些波長的輻照度會下降,因而減少作為系統(tǒng)噪聲存在的光子量。905 nm波長下的太陽輻照度是1550 nm的3倍,這意味著NIR系統(tǒng)必須應(yīng)對更多干擾傳感器的噪聲。但這只是選擇LiDAR系統(tǒng)波長時需要考慮的其中一個因素。
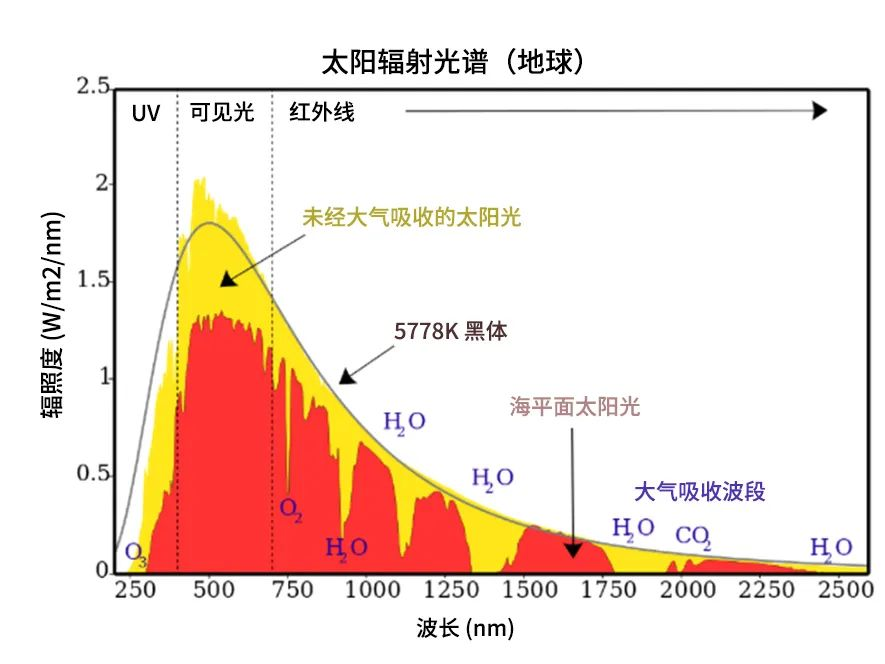
圖4:大氣對光的吸收會產(chǎn)生明顯的峰值
傳感器
LiDAR系統(tǒng)中負(fù)責(zé)感測光子的組件為不同類型的光電探測器,因此必須說明為什么它們可以根據(jù)待檢測波長而采用不同的半導(dǎo)體材料制成。在半導(dǎo)體中,帶隙可將價帶和導(dǎo)帶分開,而光子可提供能量,以幫助電子克服帶隙問題,從而使半導(dǎo)體導(dǎo)電,繼而產(chǎn)生光電流。每個光子的能量與其波長有關(guān),而半導(dǎo)體的帶隙與其靈敏度有關(guān),這就解釋了為什么所需半導(dǎo)體材料取決于待檢測光的波長。硅是最常見也是制造成本最低的半導(dǎo)體,可響應(yīng)高達(dá)1000 nm左右的可見光和NIR波長。為檢測SWIR范圍以外的波長,可對更稀有的III/V族半導(dǎo)體進(jìn)行合金化,使InGaAs之類的材料能夠檢測1000 nm至2500 nm的波長。
早期的LiDAR將PIN光電二極管用作傳感器。PIN光電二極管本身沒有增益,因此無法輕松檢測到微弱信號。雪崩光電二極管(APD)是目前LiDAR中最常用的傳感器類型,可提供適當(dāng)?shù)脑鲆妗H欢珹PD也需要像PIN光電二極管一樣在線性模式下工作,以集成光子到達(dá)信號,而且在需要非常高偏置電壓的情況下也會受到制件質(zhì)地不均的影響。LiDAR中開始日益廣泛使用的最新型傳感器以單光子雪崩二極管(SPAD)為基礎(chǔ),SPAD具有非常大的增益,并且能夠從每個檢測到的光子中產(chǎn)生可測量的電流輸出。硅光電倍增器(SiPM)是硅基SPAD陣列,其額外優(yōu)勢就是能夠通過觀察所生成信號的振幅來區(qū)分單個光子和多個光子。
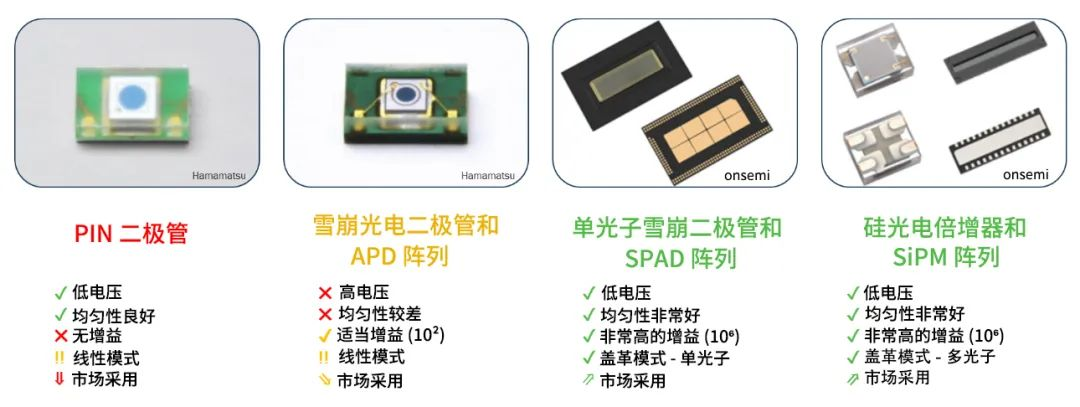
圖5:LiDAR中用于檢測信號的不同光電探測器類型
回到波長這個話題,所有這些類型的光電探測器都可以采用硅(用于NIR探測)或III/V族半導(dǎo)體(用于SWIR探測)。另一方面,可制造性和成本是技術(shù)可行性的關(guān)鍵,且CMOS硅代工廠可實現(xiàn)此類傳感器的低成本、批量生產(chǎn)。正因如此,LiDAR在實現(xiàn)更高性能的基礎(chǔ)上逐漸開始采用SiPM。盡管存在適用于SWIR的APD和SPAD,但由于未采用硅基處理器,所以很難將它們與讀出邏輯集成在一起。最后,由于針對SWIR的III/V基SPAD陣列和光電倍增器(與SiPM相似)尚未實現(xiàn)商業(yè)化,所以生態(tài)系統(tǒng)更適用于NIR波長。
激光器
光子生成是另一個完全不同的流程。半導(dǎo)體P-N結(jié)作為增益介質(zhì)可用于制造激光器;這可通過泵送的方式使電流通過結(jié),在原子進(jìn)入較低能帶時引起光子共振發(fā)射,從而產(chǎn)生相干激光束輸出來實現(xiàn)。半導(dǎo)體激光器基于直接帶隙材料(如GaAs和InP),與間接帶隙材料(硅)相比,這種材料對于原子進(jìn)入較低能帶時的光子生成非常有效。
LiDAR使用的兩種主要激光器為:邊緣發(fā)射激光器(EEL)和垂直腔面發(fā)射激光器(VCSEL)。與VCSEL相比,EEL的成本更低,輸出效率更高,所以目前使用更廣泛。但EEL在封裝和組裝成陣列方面難度更高,而且還會受到溫度范圍內(nèi)波長變化的影響,導(dǎo)致探測器不得不尋找更寬的光子波長波段,才能將更多的環(huán)境光子檢測為噪音。
盡管較新的VCSEL技術(shù)成本更高、功效更低,但由于其光束是從頂部生成的,所以具有封裝簡單高效的優(yōu)勢。由于VCSEL的成本將繼續(xù)顯著降低,功效將提高,所以其市場采用率開始上升。EEL和VCSEL可用于NIR和SWIR波長生成,兩者之間的關(guān)鍵區(qū)別在于:NIR波長可使用GaAs生成,而SWIR波長則需要使用InGaAsP。大尺寸晶圓廠能幫助降低GaAs激光器成本,從成本和供應(yīng)鏈安全角度來看,這再一次突出了NIR LiDAR制造商生態(tài)系統(tǒng)的優(yōu)勢。
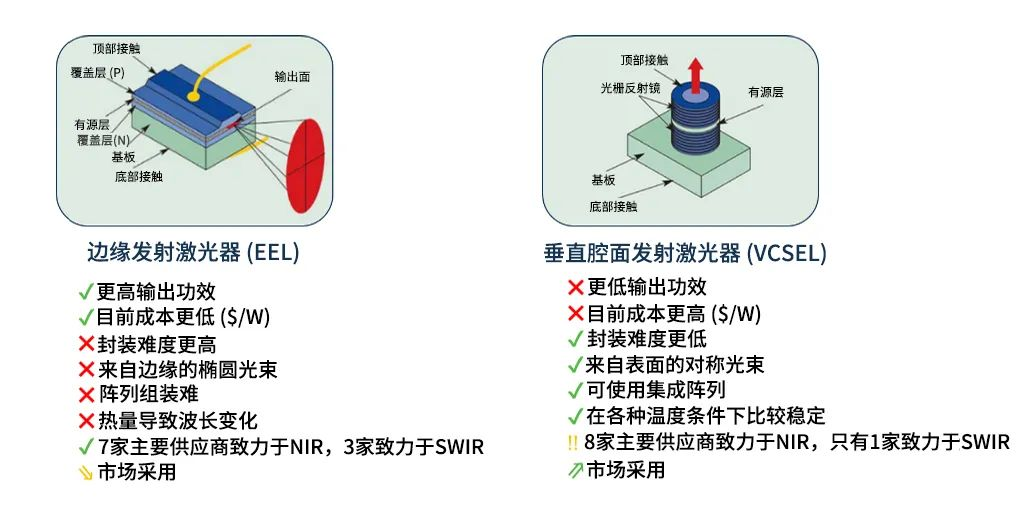
圖6:LiDAR中使用的不同激光類型
激光功率和人眼安全<.strong>
在討論波長大辯論時,必須考慮LiDAR系統(tǒng)對人眼安全的影響。dToF LiDAR概念涉及以高峰值功率,沿著特定視角將短激光脈沖發(fā)射到場景。站在LiDAR發(fā)射路徑上的行人需確保自己的眼睛不會被射向自己方向的激光損傷,IEC-60825規(guī)范規(guī)定了不同波長的光的最大容許照射量。類似于可見光的NIR光能夠穿過角膜到達(dá)人眼的視網(wǎng)膜,而大部分SWIR光在角膜內(nèi)可被吸收,因此照射量更高。
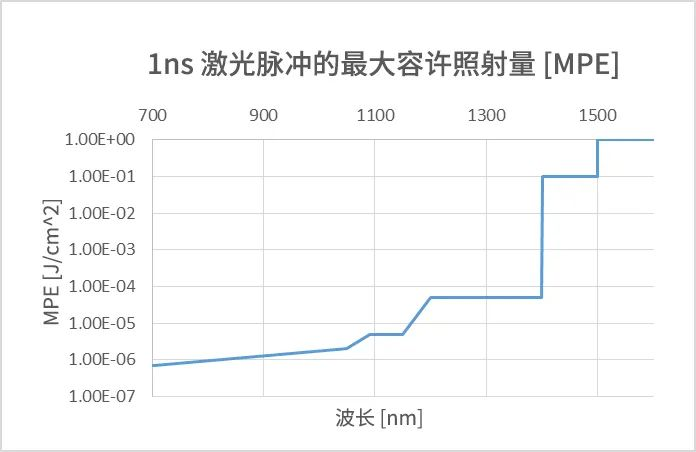
圖7:IEC-60825人眼安全型激光照射量規(guī)范
從性能角度來看,對于基于1550 nm的系統(tǒng)來說,能夠輸出高出多個數(shù)量級的激光功率是一個優(yōu)勢,因為這樣可以發(fā)出更多光子,從而檢測到更多返回的光子。但更高的激光功率也意味著需要進(jìn)行熱權(quán)衡。需要注意的是,適當(dāng)?shù)娜搜郯踩驮O(shè)計必須在不考慮波長的情況下進(jìn)行,同時必須清楚地考慮每個脈沖的能量和激光孔徑的大小。對于基于905 nm的LiDAR,可以通過其中的任意一個因素來增加峰值功率,如下圖8所示。
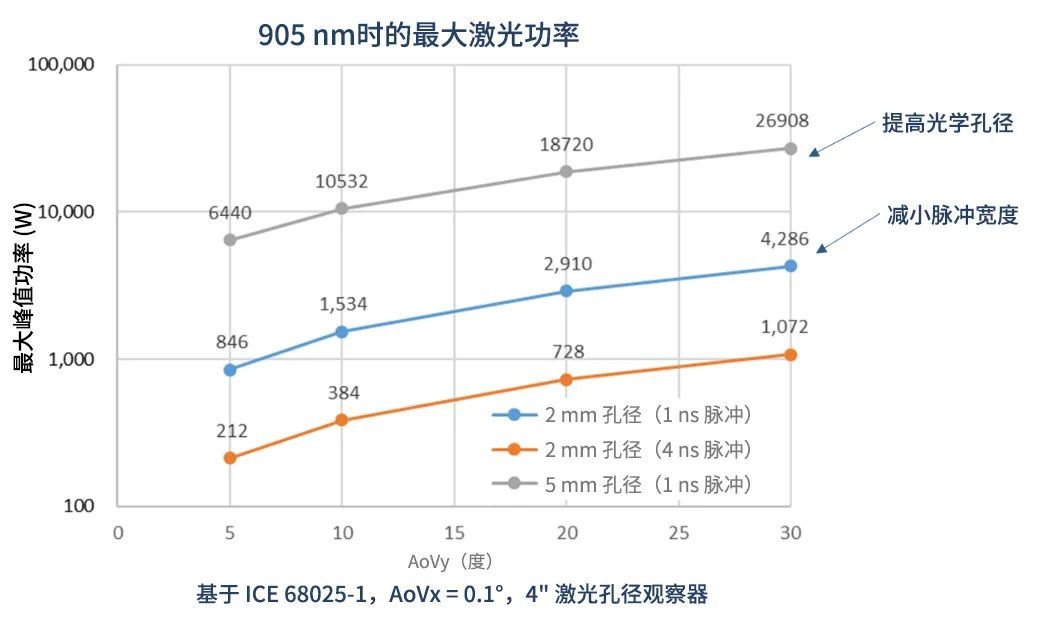
圖8:基于不同光學(xué)器件和激光器參數(shù)的NIR LiDAR人眼安全型激光器設(shè)計
NIR與SWIR LiDAR系統(tǒng)對比
上文著重描述能夠輸出的激光功率大小,現(xiàn)在我們繼續(xù)探討所用的傳感器。顯然,可檢測更微弱信號的更高性能傳感器可為系統(tǒng)帶來多方面的益處——能夠?qū)崿F(xiàn)更長的測程,或能夠使用更少的激光功率來實現(xiàn)相同的測程。安森美(onsemi)開發(fā)了一系列可提高光子探測效率(PDE)的NIR LiDAR SiPM,PD 是指示靈敏度的關(guān)鍵參數(shù)。其新推出的RDM系列傳感器PDE達(dá)到市場領(lǐng)先的18%。
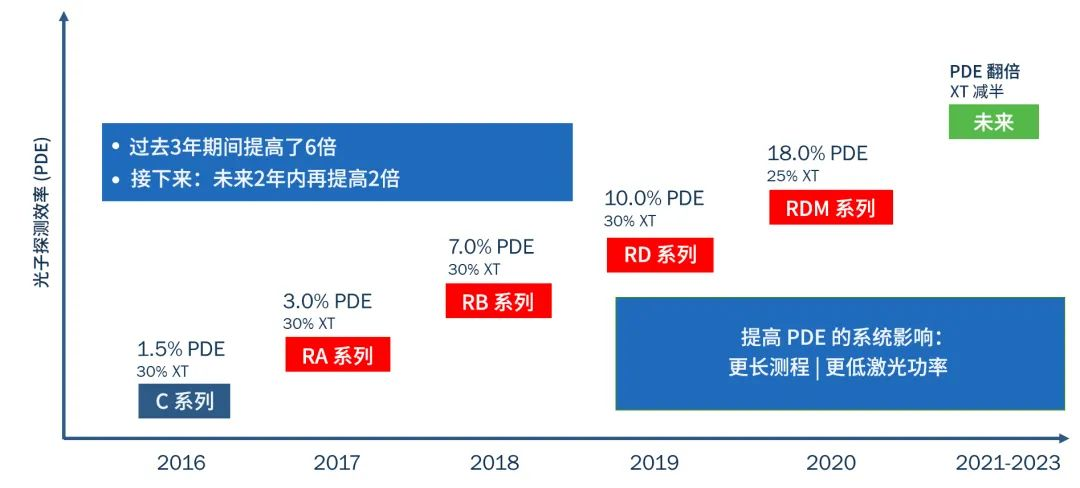
圖9:安森美SiPM的工藝發(fā)展路線圖
為比較NIR dToF LiDAR與SWIR dToF LiDAR的性能,我們利用相同的LiDAR架構(gòu)和不同激光和傳感器參數(shù)的環(huán)境條件進(jìn)行了系統(tǒng)建模。LiDAR架構(gòu)為共軸系統(tǒng),配有一個16信道探測器陣列和一個遍布整個視場的掃描機(jī)制,如下圖10所示。該系統(tǒng)模型已通過硬件驗證,使我們能夠準(zhǔn)確估計LiDAR系統(tǒng)的性能。
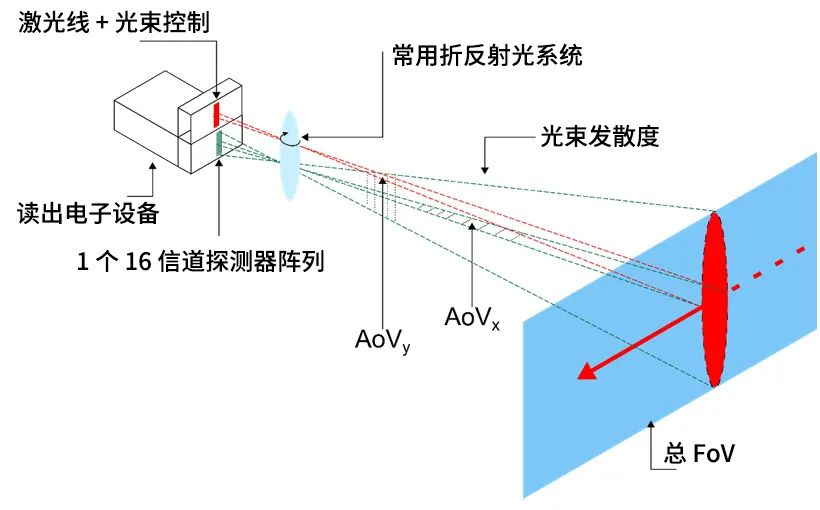
圖10:dToF LiDAR傳感器的系統(tǒng)模型
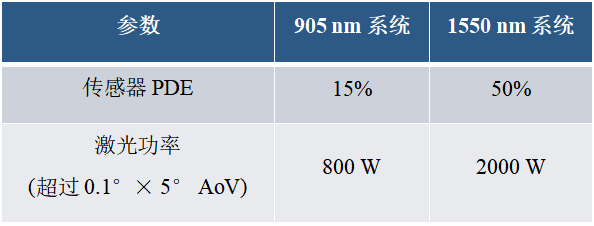
表2:NIR和SWIR系統(tǒng)模型模擬的LiDAR傳感器和激光器參數(shù)
由于使用了PDE較高的InGaAs合金,所以1550 nm系統(tǒng)采用更高的激光功率以及更高的PDE傳感器,這樣就可以在我們的系統(tǒng)模擬中實現(xiàn)更出色的測距性能。通過使用傳感器鏡頭(分別對焦在大約905 nm和 1550 nm)上50 nm帶通濾波器過濾的100 klux環(huán)境光系統(tǒng)級參數(shù),以30 fps、500 kHz激光頻率和1 ns脈沖寬度進(jìn)行超過80°的水平0.1°x 5°視角掃描,并使用22 mm鏡頭直徑,得出如下結(jié)果。
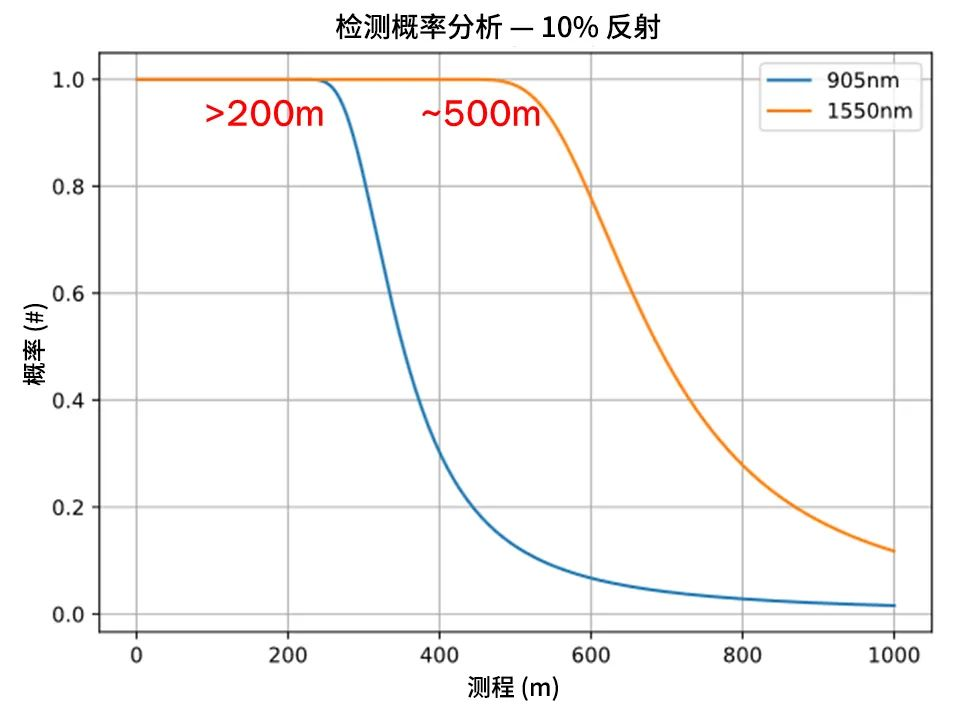
圖11:基于905 nm和1550 nm的類似LiDAR系統(tǒng)的模擬結(jié)果
正如預(yù)期,1550 nm系統(tǒng)能夠?qū)Φ头瓷渎饰矬w進(jìn)行更遠(yuǎn)的測距,99%的測距概率下可達(dá)到500米。然而,基于905 nm的系統(tǒng)仍可以實現(xiàn)超過200米的測距,這表明兩種類型的系統(tǒng)在典型環(huán)境條件下都可以達(dá)到汽車遠(yuǎn)程LiDAR的要求。在雨水或大霧等惡劣環(huán)境條件下時,SWIR光的吸水性會使其性能比基于NIR的系統(tǒng)下降得更快,而這是另一個考慮因素。
成本考慮因素
在廣泛研究LiDAR系統(tǒng)所用技術(shù)以及使用不同波長的影響之后,現(xiàn)在,我們回到成本考慮因素上。我們之前就解釋過,用于NIR LiDAR的傳感器采用天然CMOS硅鑄造工藝,這可最大限度地降低半導(dǎo)體的成本。此外,通過使用代工廠目前已經(jīng)掌握的堆疊芯片技術(shù),可將CMOS讀出邏輯與傳感器集成到一個芯片中,這進(jìn)一步壓縮了信號鏈并降低了成本。
相反,SWIR傳感器使用成本更高的III/V半導(dǎo)體代工廠(如InGaAs)和新型Ge-Si混合技術(shù),雖然可降低SWIR傳感器成本,并能更輕松地集成讀出邏輯,但即使在技術(shù)成熟后,估計仍比傳統(tǒng)的CMOS硅貴5倍以上。從激光器方面看,用于制造NIR系統(tǒng)激光器芯片的GaAs晶圓與用于制造SWIR系統(tǒng)激光器芯片的InGaAs晶圓尺寸差異同樣會導(dǎo)致成本差異,而NIR系統(tǒng)可以使用VCSEL,并且現(xiàn)成的供應(yīng)商更多,這一事實亦可降低集成成本。
綜合以上因素,IHS Markit進(jìn)行的一項分析調(diào)查(Amsrud,2019)顯示,使用相同類型的組件(傳感器或激光器)時,SWIR系統(tǒng)的成本比NIR系統(tǒng)高10至100倍。2019年,NIR系統(tǒng)傳感器和激光器的平均組件總成本估計為4~20美元/信道,到2025年將降至2~10美元/信道。相比之下,2019年,SWIR系統(tǒng)傳感器和激光器的平均組件總成本估計為275美元/信道,到2025年將降至155美元/信道。考慮到LiDAR系統(tǒng)包含多個信道,即使使用1D掃描方法,這也會是一個巨大的成本差異,因為仍需要使用單點信道的垂直陣列。

表3:成本考慮因素總結(jié)(來源:IHS Markit)
LiDAR市場動態(tài)也不利于SWIR陣營。自動駕駛市場并未像五年前市場預(yù)期的那樣迅速發(fā)展,而必須使用LiDAR的Level 4和Level 5自主性系統(tǒng)也還需要幾年才能實現(xiàn)大規(guī)模部署。同時,利用LiDAR的工業(yè)和機(jī)器人市場對成本更加敏感,并且SWIR系統(tǒng)的超高性能優(yōu)勢并非不可或缺,這些系統(tǒng)制造商沒有辦法像通常所說的那樣通過增加產(chǎn)量來降低組件成本。產(chǎn)量增加時可實現(xiàn)成本降低,但實現(xiàn)量產(chǎn)需要降低成本,這其實就是“先有雞還是先有蛋”的問題。
總結(jié)
在深入研究了這項技術(shù)以及NIR和SWIR系統(tǒng)之間的差異后,當(dāng)今絕大多數(shù)LiDAR系統(tǒng)使用NIR波長的原因就顯而易見。雖然,對未來的展望并不是100%確定的,但顯然,成本和可用性是生態(tài)系統(tǒng)供應(yīng)商的關(guān)鍵考慮因素,由于CMOS硅的技術(shù)優(yōu)勢和規(guī)模經(jīng)濟(jì),NIR系統(tǒng)無疑更具經(jīng)濟(jì)效益。雖然SWIR支持遠(yuǎn)程LiDAR系統(tǒng),但基于NIR的LiDAR也可以滿足汽車遠(yuǎn)程測距需求,同時在ADAS和AD應(yīng)用所需的短程到中程配置中也表現(xiàn)出色。
目前,基于NIR的LiDAR已經(jīng)在汽車市場中實現(xiàn)了大批量生產(chǎn),這表明該技術(shù)已經(jīng)實現(xiàn)了商業(yè)化并通過了市場檢驗,但整合仍需時日,且無論輸贏,都需要經(jīng)歷動蕩和調(diào)整。20世紀(jì)之交的汽車行業(yè)有30家不同的制造商,隨后十年增加至近500家,但僅僅數(shù)年之后,大多數(shù)制造商已經(jīng)銷聲匿跡。預(yù)計到2030年,LiDAR制造商也會經(jīng)歷類似的發(fā)展歷程。
參考文獻(xiàn)
Yole Développement(2020). LiDAR for Automotive and Industrial Applications - Market and Technology Report2020
Amsrud, P. (2019 September 25). The race to a low cost LIDAR system [Conference Presentation]. Automotive LIDAR 2019, Detroit, MI, United States. IHS Markit.
Nick84(2013)CC BY-SA 3.0, via Wikimedia Commons
審核編輯 黃宇
-
傳感器
+關(guān)注
關(guān)注
2565文章
52982瀏覽量
767270 -
波長
+關(guān)注
關(guān)注
0文章
65瀏覽量
22720 -
LIDAR
+關(guān)注
關(guān)注
10文章
349瀏覽量
30358
發(fā)布評論請先 登錄
什么是LiDAR?LiDAR的工作原理





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論