 機器人里程計數據可視化
機器人里程計數據可視化

STM32端返回的x軸線速度、y軸線速度是相對于自身的機體坐標系的速度,而機器人的位置信息是相對于世界坐標系的位置,所以在對速度進行積分前, 要先將機體坐標系下的x軸線速度、y軸線速度轉換到世界坐標系 ,如圖:
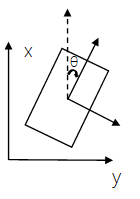
這個坐標變換可以通過一個簡單的旋轉矩陣來實現

其中θ就是機器人的偏航角。相應的程序如下:
/* 對速度進行積分得到位移 */
// 獲取當前時間
current_time = ros::Time::now();
// 獲取積分間隔
double dt = (current_time - last_time).toSec();
last_time = current_time;
// 將機體系速度轉換到里程計坐標系
double delta_x = (vx * cos(th) - vy * sin(th)) * dt;
double delta_y = (vx * sin(th) + vy * cos(th)) * dt;
// 速度積分
x += delta_x;
y += delta_y;
在機器人中,一般使用四元數/旋轉矩陣的形式來表示機器人的姿態,而不是歐拉角形式。所以需要將STM32返回的偏航角轉換為四元數,程序如下:
geometry_msgs::Quaternion odom_quat = tf::createQuaternionMsgFromYaw(th);
以上就獲取了完整的機器人里程計數據,接下來需要將里程計數據發布到ROS中。
nav_msgs::Odometry odom;
geometry_msgs::TransformStamped odom_trans;
odom_trans.header.stamp = current_time;
odom_trans.header.frame_id = "odom";
odom_trans.child_frame_id = "base_link";
odom_trans.transform.translation.x = x;
odom_trans.transform.translation.y = y;
odom_trans.transform.translation.z = 0.0;
odom_trans.transform.rotation = odom_quat;
// 發布坐標變換
odom_broadcaster.sendTransform(odom_trans);
odom.header.stamp = current_time;
odom.header.frame_id = "odom";
odom.child_frame_id = "base_link";
// 設置機器人的位置和姿態
odom.pose.pose.position.x = x;
odom.pose.pose.position.y = y;
odom.pose.pose.position.z = 0.0;
odom.pose.pose.orientation = odom_quat;
// 設置機器人的速度
odom.twist.twist.linear.x = vx;
odom.twist.twist.linear.y = vy;
odom.twist.twist.angular.z = vth;
// 發布里程計消息
odom_pub.publish(odom);
運行后,打開PC上的Ubuntu,配置ip從而實現遠程連接嵌入式處理器上的ROS系統,參照:ROS多機通信(https://blog.csdn.net/qq_42688495/article/details/115260247)
配置完成后,重新打開一個終端,輸入:rviz,打開ROS的可視化工具,按照下圖操作即可

可視化結果如下:

最后將該rviz配置保存至文件,點擊File→Save Config As,將配置保存為xxxx.rviz。下次打開時,在命令行運行:rosrun rviz rviz -d xxxx.rviz即可。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
機器人
+關注
關注
213文章
29735瀏覽量
212856 -
STM32
+關注
關注
2293文章
11032瀏覽量
364849 -
ROS
+關注
關注
1文章
288瀏覽量
17742
發布評論請先 登錄
相關推薦
熱點推薦
可視化機器人
該機器人配有兩個直流電機作為動力來源,采用履帶式行進,機器人上面有四個擺臂,可以自由靈活擺動。我們給該機器人開發有相應的上位機,和控制手柄。該機器人有三中控制模式:通過手柄控制的手動控
發表于 07-31 13:14
關于機器人定位與建圖,這些小技巧你懂嗎
說到機器人自主定位導航解決方案及技術,大家腦海里肯定會浮現“定位”、“建圖”、“避障”、“路徑規劃”等字眼。定位 在思嵐提供的自主定位導航解決方案中,主要是通過雷達和里程計的數據來進行定位。雖然
發表于 03-28 15:48
采用MATLAB設計下的可視化與控制
1、前言:MATLAB下機器人可視化與控制---simulink篇(1)主要內容:是利用smimport('YourRobot.urdf');函數將含有機器人文件的機器人導入到MATL
發表于 05-21 09:38
如何去實現一種送餐機器人產品設計
漂移,環境中移動物體過多時容易出錯UWB定位誤差十幾厘米,信號容易遮擋視覺二維碼 + 輪子里程計對比后最優方案是 視覺二維碼+輪子里程計基于二維碼+輪子里程計方法,主要的傳感器數據來源
發表于 11-11 07:10
機器人焊裝工位的可視化仿真研究
由于機器人焊裝工位仿真對象復雜以及傳統仿真方法難以建立其準確的仿真模型,本文提出了基于EM-Engineer仿真平臺的機器人焊裝工位可視化仿真系統。研究了仿真建模、焊接工
發表于 12-18 11:49
?9次下載
使用Python可視化數據,機器人開發編程
機器學習開發,與Mail.Ru Search數據分析負責人Egor Polusmak和Mail.Ru Group數據科學家Yury Kashnitsky一起探索如何使用Python可視化
如何設計液壓式雙足機器人運動數據可視化系統
液壓雙足機器人由于具有高負載、快速動態響應等優點,逐漸地應用于軍事、救災等復雜危險的任務中。設計一個穩定、高效的運動數據感知獲取系統并實現數據可視化顯示,對雙足
發表于 03-19 16:03
?6次下載
輪式移動機器人里程計分析
但凡涉及到可移動的機器人的導航系統,大概率會涉及到里程計的計算,比如輪式移動機器人、無人機、無人艇,以及多足機器人等,而計算里程計的方案也有
介紹一種基于編碼器合成里程計的方案
摘要:本文主要分析輪式移動機器人的通用里程計模型,并以兩輪差速驅動機器人的里程計計算為案例,給出簡化后的兩輪差速驅動機器人
ROS機器人導航調參手冊
在 ROS 中,我們可以輸出帶有時間戳的里程計數據,然后看機器人達到恒定的最大平移速度(ti)需要多長時間,然后使用來自里程計數據(nav_msgs/Odometry message)來計算這個過程的加速度。多做幾次實驗求平均值

機器人里程計數據的上傳與接收
1.通信協議 里程計數據格式(19字節) 2.STM32端 /** * @brief 發送里程計數據 */ void DataTrans_Odom ( void ) { uint8_t _cnt






 工商網監
工商網監
評論