") 車載時(shí)鐘同步can_tsync同步原理
車載時(shí)鐘同步can_tsync同步原理
can_tsync同步原理
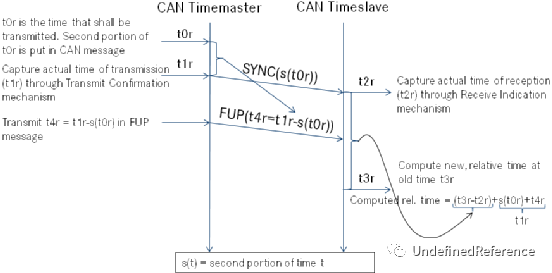
整體來說,can的時(shí)間同步還是比較簡(jiǎn)單的,如下圖所示,整個(gè)過程如下(tips:時(shí)間戳自1970年1月1日00:00:00經(jīng)過的時(shí)間,是由秒+納秒組成的。):
1time master在t01時(shí)刻以廣播的形式發(fā)送一個(gè)sync報(bào)文,并把時(shí)間秒部分的時(shí)間放到報(bào)文上,發(fā)送到time slave;使用can confirmation的機(jī)制,記下sync報(bào)文實(shí)際從can驅(qū)動(dòng)發(fā)送出去的時(shí)間,t1r.
- time slave在t2r時(shí)刻接收到sync報(bào)文
- time master在sync發(fā)送完之后,隨后發(fā)送follow up報(bào)文,并把t1r的納秒通過報(bào)文發(fā)送出去,即t4r = t2r-s(t0r)。這里有一個(gè)潛在條件,那就是sync報(bào)文由can timesync模塊組裝好報(bào)文后調(diào)用發(fā)送接口,直到從can driver上出去,整個(gè)時(shí)間是不會(huì)超過1s的。所以t4r實(shí)際上就是從can timesync報(bào)文發(fā)送出去直到can driver發(fā)送出去的一個(gè)延時(shí)。
- time slave在t3r接收到follow up報(bào)文。
- 因此在t3r時(shí)刻,master此刻真正的時(shí)間t(master_now) = t3r - t2r + t4r
注意:實(shí)際上,上面的時(shí)間大多都是不精確的:

- SYNC和FOLLOW_UP消息分為兩種格式,Type=0x10為不安全的不帶CRC校驗(yàn)的報(bào)文格式,對(duì)應(yīng)FUP消息類型為0x18;Type=0x20為帶CRC校驗(yàn)的安全報(bào)文格式,對(duì)應(yīng)FUP消息類型為0x28。
- Byte0:時(shí)間同步類型:0x20代表當(dāng)前發(fā)送的是帶CRC校驗(yàn)的TSync同步消息, 0x28代表當(dāng)前發(fā)送的是對(duì)應(yīng)0x20 SYNC消息的FUP同步消息;0x10代表當(dāng)前發(fā)送的是不帶CRC校驗(yàn)的TSync同步消息, 0x18代表當(dāng)前發(fā)送的是對(duì)應(yīng)0x10 SYNC消息的FUP同步消息;
- Byte1:byte0為0x20或0x28時(shí),Byte1為該消息的CRC校驗(yàn)值;
- Byte2:高4位為時(shí)間同步域Time Domain;低4位為Sequence Counter,隨發(fā)送次數(shù)循環(huán)累加;
- Byte3:byte0為0x10或0x20時(shí),Byte3為UserByte0;同步類型為0x28或0x18時(shí),高5位保留, bit3 SGW為時(shí)間同步狀態(tài)(0:SyncToGTM, 1:SyncToSubDomain),bit1-bit0 OVS為時(shí)間同步溢出時(shí)間overflow of seconds;
- Byte4-Byte7為同步時(shí)間,同步類型為SYNC消息時(shí)為32bits 秒時(shí)間,同步類型為FUP消息時(shí)為30bits ns時(shí)間。
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點(diǎn)僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場(chǎng)。文章及其配圖僅供工程師學(xué)習(xí)之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請(qǐng)聯(lián)系本站處理。
舉報(bào)投訴
-
CAN
+關(guān)注
關(guān)注
57文章
2893瀏覽量
466776 -
車載
+關(guān)注
關(guān)注
18文章
629瀏覽量
83812 -
時(shí)鐘同步
+關(guān)注
關(guān)注
0文章
111瀏覽量
12952 -
報(bào)文
+關(guān)注
關(guān)注
0文章
39瀏覽量
4161
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
熱點(diǎn)推薦
同星多設(shè)備間的時(shí)間戳同步機(jī)制TSync功能與使用
隨著汽車網(wǎng)絡(luò)測(cè)試的通道數(shù)量不斷增加,時(shí)常需要多個(gè)同星設(shè)備同時(shí)連接在同一臺(tái)電腦的同一個(gè)TSMaster應(yīng)用程序,并進(jìn)行多設(shè)備同時(shí)執(zhí)行CAN報(bào)文收發(fā)和記錄等功能,必然有多設(shè)備之間的時(shí)間戳同步以及設(shè)備

AUTOSAR CAN時(shí)鐘同步問題
請(qǐng)問有沒有AUTOSAR CAN時(shí)鐘同步的能運(yùn)行的代碼,或者有沒有能做這一塊的大佬,主要是CanTsyn和STBM這兩個(gè)模塊的。有償,價(jià)格都好商量,急需。
發(fā)表于 11-09 00:00
基于FPGA的提取位同步時(shí)鐘DPLL設(shè)計(jì)
基于FPGA的提取位同步時(shí)鐘DPLL設(shè)計(jì)
在數(shù)字通信系統(tǒng)中,同步技術(shù)是非常重要的,而位同步是最基本的同步。位
發(fā)表于 01-25 09:36
?3453次閱讀
同步網(wǎng)時(shí)鐘及等級(jí)
同步網(wǎng)時(shí)鐘及等級(jí)
基準(zhǔn)時(shí)鐘 同步網(wǎng)由各節(jié)點(diǎn)時(shí)鐘和傳遞同步定時(shí)信號(hào)的
發(fā)表于 04-03 16:27
?3867次閱讀
分析PTN時(shí)鐘同步技術(shù)及應(yīng)用
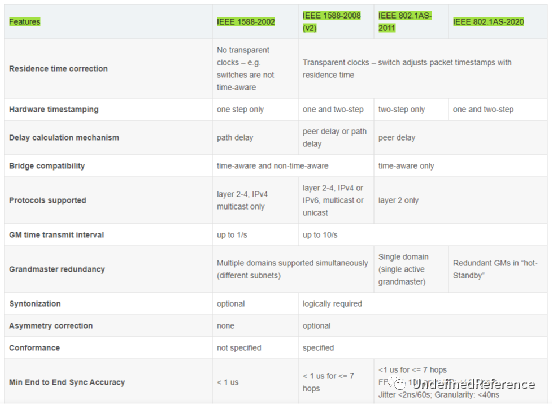
時(shí)鐘同步是分組傳送網(wǎng)(PTN)需要考慮的重要問題之一。可以采用同步以太網(wǎng)、IEEE 1588v2、網(wǎng)絡(luò)時(shí)間協(xié)議(NTP)等多種技術(shù)實(shí)現(xiàn)時(shí)鐘同步
發(fā)表于 12-16 12:01
?5819次閱讀
微波時(shí)鐘同步設(shè)計(jì)方案
微波作為無線和傳輸設(shè)備的重要接入設(shè)備,在網(wǎng)絡(luò)設(shè)計(jì)和使用中要針對(duì)接入業(yè)務(wù)的類型,提供滿足其需求的時(shí)鐘同步方案。當(dāng)前階段,微波主要支持的時(shí)鐘同步類型包括:GPS,BITS,1588,158
發(fā)表于 12-07 20:51
?856次閱讀
時(shí)鐘信號(hào)的同步 在數(shù)字電路里怎樣讓兩個(gè)不同步的時(shí)鐘信號(hào)同步?
時(shí)鐘信號(hào)的同步 在數(shù)字電路里怎樣讓兩個(gè)不同步的時(shí)鐘信號(hào)同步? 在數(shù)字電路中,時(shí)鐘信號(hào)的
車載時(shí)鐘同步can_tsync實(shí)現(xiàn)原理
CAN時(shí)鐘同步來源,AUTOSAR cp的規(guī)范,AUTOSAR定義的基于CAN總線時(shí)間同步的CanTSyn模塊處理
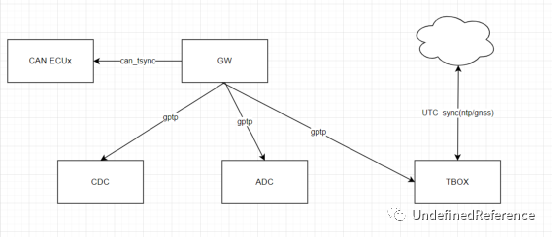
車載gptp同步原理介紹
不通的ptp版本和gptp的對(duì)比如下: gptp同步原理 針對(duì)gptp,所有slave節(jié)點(diǎn),都與master(grandmaster)的時(shí)鐘保持同步;在車載領(lǐng)域,master節(jié)點(diǎn)都是靜
車載時(shí)間融合與utc同步
時(shí)間融合和使用 對(duì)于整車來說,Tsync模塊需要將整車所有vehicle time和utc同步好,對(duì)于用戶來說,開發(fā)者最好提供獲取vehicle time和utc時(shí)間的接口,用戶無需要關(guān)注時(shí)鐘
如何選擇GPS時(shí)鐘同步裝置?
如何選擇GPS時(shí)鐘同步裝置? 選擇GPS時(shí)鐘同步裝置可能是一個(gè)相對(duì)復(fù)雜的過程,因?yàn)檫@需要考慮到多種因素,包括需求、性能、可靠性和成本。 第一步是確定需要
時(shí)鐘同步怎樣組網(wǎng)?
時(shí)鐘同步怎樣組網(wǎng)? 時(shí)鐘同步是計(jì)算機(jī)網(wǎng)絡(luò)中的重要問題,主要用于確保在多個(gè)節(jié)點(diǎn)之間保持時(shí)間的一致性。時(shí)鐘同
網(wǎng)絡(luò)時(shí)鐘同步有哪些要求?如何在5G網(wǎng)絡(luò)中測(cè)試時(shí)間與時(shí)鐘同步?
網(wǎng)絡(luò)時(shí)鐘同步有哪些要求?要注意哪些問題?如何在5G網(wǎng)絡(luò)中測(cè)試時(shí)間與時(shí)鐘同步? 網(wǎng)絡(luò)時(shí)鐘同步是指在
RobustRIO-E模塊 時(shí)鐘同步&分發(fā),實(shí)現(xiàn)聲音與振動(dòng)板卡間及跨機(jī)箱時(shí)鐘同步
同步時(shí)鐘發(fā)生器 + 同步時(shí)鐘分發(fā)器
TSN時(shí)鐘同步精度技術(shù)解析:TSN網(wǎng)絡(luò)的基石與保障
一、引言 在現(xiàn)代網(wǎng)絡(luò)通信領(lǐng)域,時(shí)鐘同步精度至關(guān)重要,時(shí)間敏感網(wǎng)絡(luò)(TSN)作為新一代工業(yè)通信的核心技術(shù),其時(shí)鐘同步精度直接影響數(shù)據(jù)傳輸?shù)膶?shí)時(shí)性與系統(tǒng)協(xié)同效率。尤其在工業(yè)自動(dòng)化、





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論