") 使用STL函數(shù)控制傳送帶
使用STL函數(shù)控制傳送帶
步驟
要?jiǎng)?chuàng)建 STL 函數(shù)塊“STL-Conveyor”,請(qǐng)按以下步驟操作:
1. 打開項(xiàng)目樹中的“程序塊” 文件夾。
2. 雙擊“添加新塊”。
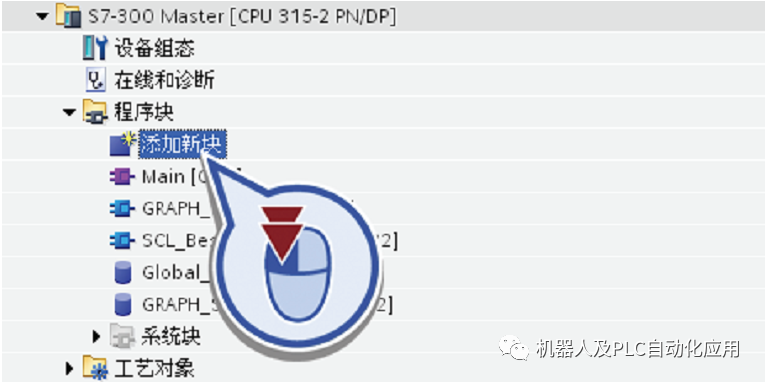
3. 要添加一個(gè)函數(shù):
– 單擊“函數(shù)”。
– 指定塊名稱“STL-Conveyor”。
– 選擇類型“STL” 。
– 單擊“確定”。

4. 保存項(xiàng)目。
結(jié)果
成功創(chuàng)建了 STL 函數(shù)“STL-Conveyor”。 程序編輯器將自動(dòng)打開。
定義 STL 函數(shù)的接口
步驟
要定義接口,請(qǐng)按以下步驟操作:
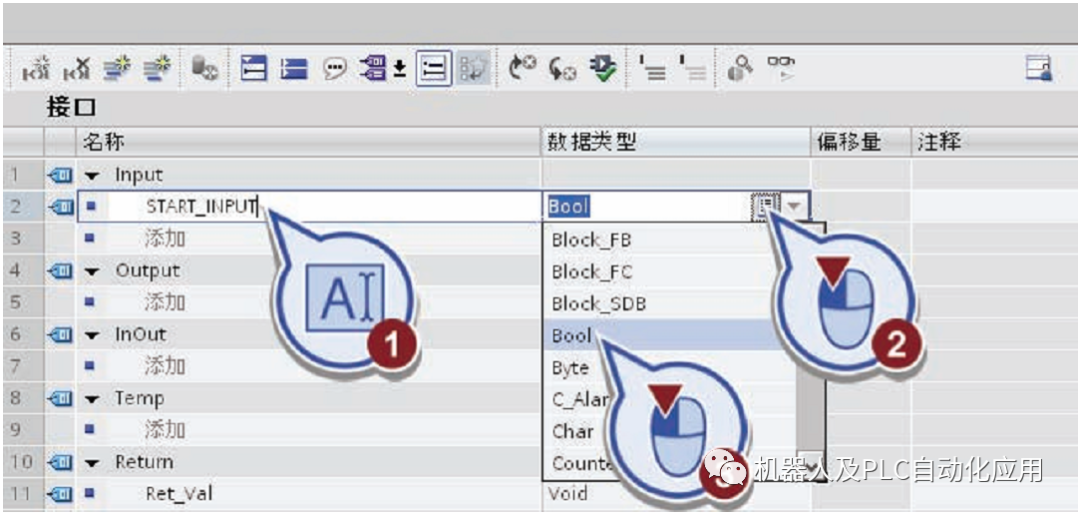
1. 在“Input” 部分定義帶有以下屬性的輸入?yún)?shù):
– 名稱:"START_INPUT"
– 數(shù)據(jù)類型:"Bool"
使用此參數(shù)激活傳送帶。
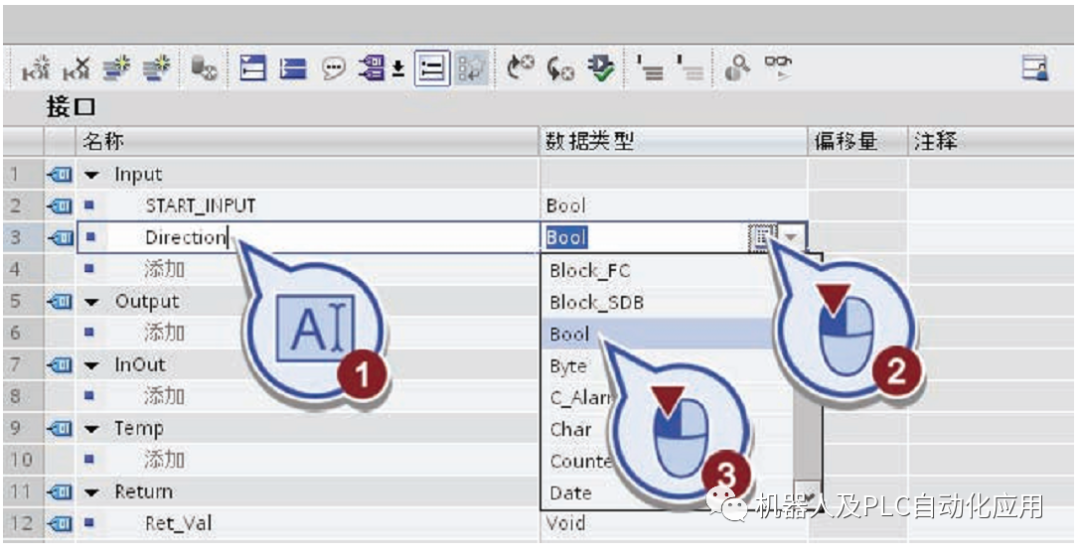
2. 在“Input” 部分定義帶有以下屬性的第二個(gè)輸入?yún)?shù):
– 名稱:"Direction"
– 數(shù)據(jù)類型:"Bool"
此參數(shù)用于判斷傳送帶的移動(dòng)方向。
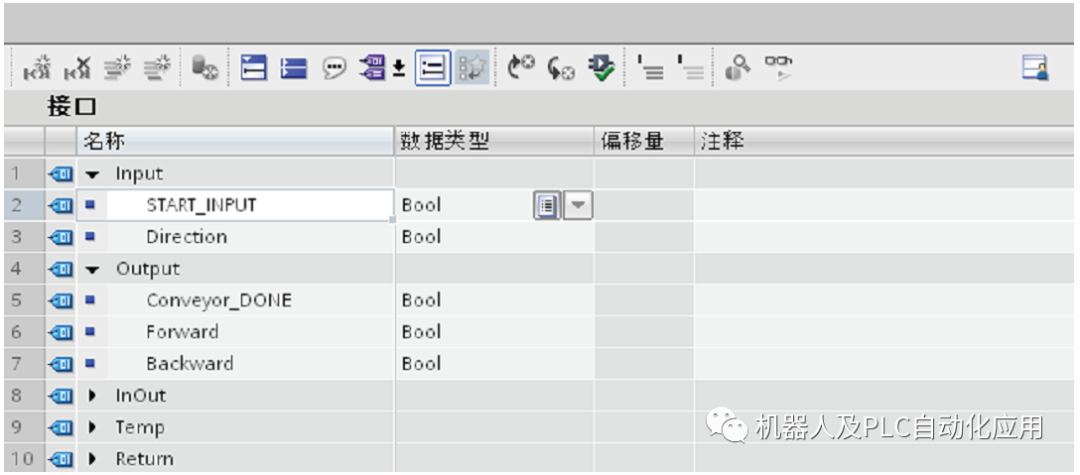
3. 在“Output” 部分定義帶有以下屬性的輸出參數(shù):
– 名稱:"Conveyor_DONE"
– 數(shù)據(jù)類型:"Bool"
使用此參數(shù)查詢傳送帶是否已激活。
4. 在“Output” 部分定義帶有以下屬性的第二個(gè)輸出參數(shù):
– 名稱:"Forward"
– 數(shù)據(jù)類型:"Bool"
此參數(shù)用于控制傳送帶向前移動(dòng)。
5. 在“Output” 部分定義帶有以下屬性的第三個(gè)輸出參數(shù):
– 名稱:"Backward"
– 數(shù)據(jù)類型:"Bool"
此參數(shù)用于控制傳送帶向后移動(dòng)。
6. 保存項(xiàng)目。
結(jié)果
在 STL 函數(shù)的接口中成功定義了所有必需參數(shù)。
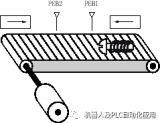
在以下部分中,將編寫控制傳送帶的 STL 函數(shù)。 要執(zhí)行此操作,需要三個(gè)程序段:
● 在第一個(gè)程序段中,判斷傳送帶是否向前移動(dòng)。
– 為此,需要置位兩個(gè)輸入?yún)?shù)“START_INPUT” 和“Direction” 。
– 如果傳送帶向前移動(dòng),則置位輸出“Forward”。
– 同時(shí)復(fù)位輸出“Conveyor_DONE”,表示傳送帶處于活動(dòng)狀態(tài)。
● 在第二個(gè)程序段中,判斷傳送帶是否向后移動(dòng)。
– 要執(zhí)行此操作,首先要查詢是否置位了輸入?yún)?shù)“START_INPUT” 以及輸入?yún)?shù)“Direction” 是否沒有置位。
– 如果是,則置位輸出“Backward”。
– 同時(shí)復(fù)位輸出“Conveyor_DONE”,表示傳送帶處于活動(dòng)狀態(tài)。
● 在第三個(gè)程序段中,查詢是否沒有置位輸入?yún)?shù)“START_INPUT” 。 如果沒有置位,則將復(fù)位控制傳送帶的兩個(gè)輸出,并置位輸出“Conveyor_DONE”。
步驟
要編寫 STL 函數(shù),請(qǐng)按以下步驟操作:
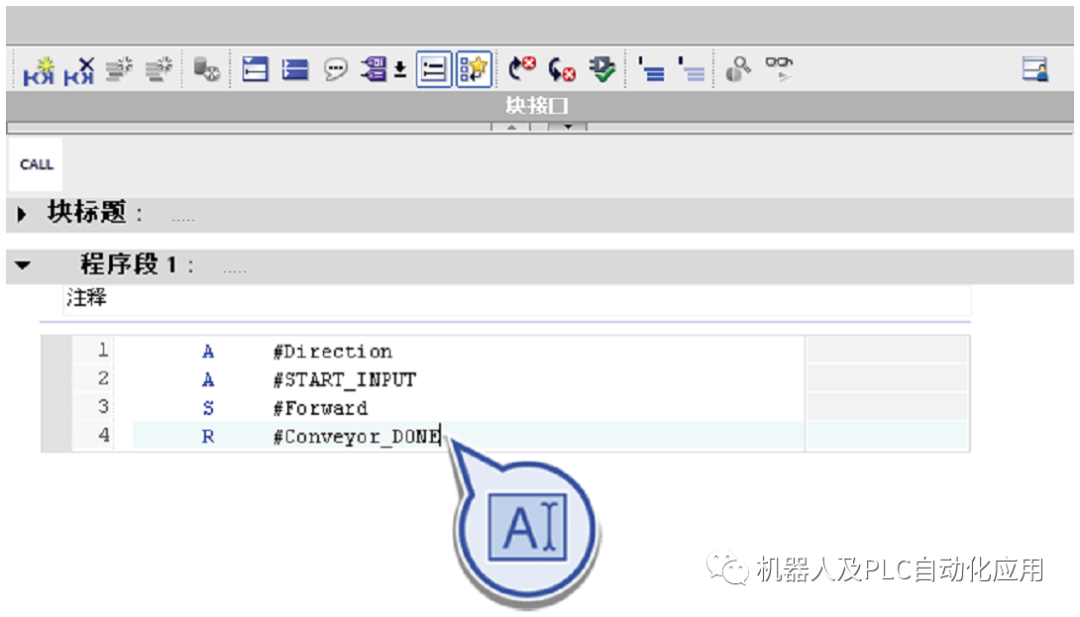
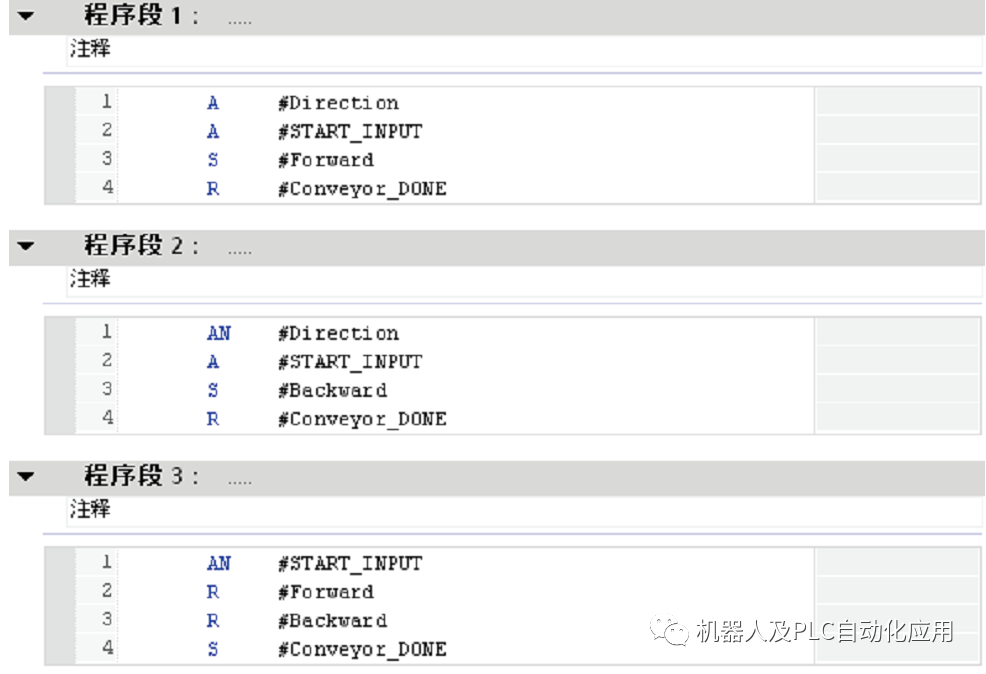
1. 定義程序段 1 的程序代碼:
– 1. 行:"A #Direction"
– 2. 行:"A #START_INPUT"
– 3. 行:"S #Forward"
– 4. 行:"R #Conveyor_DONE"
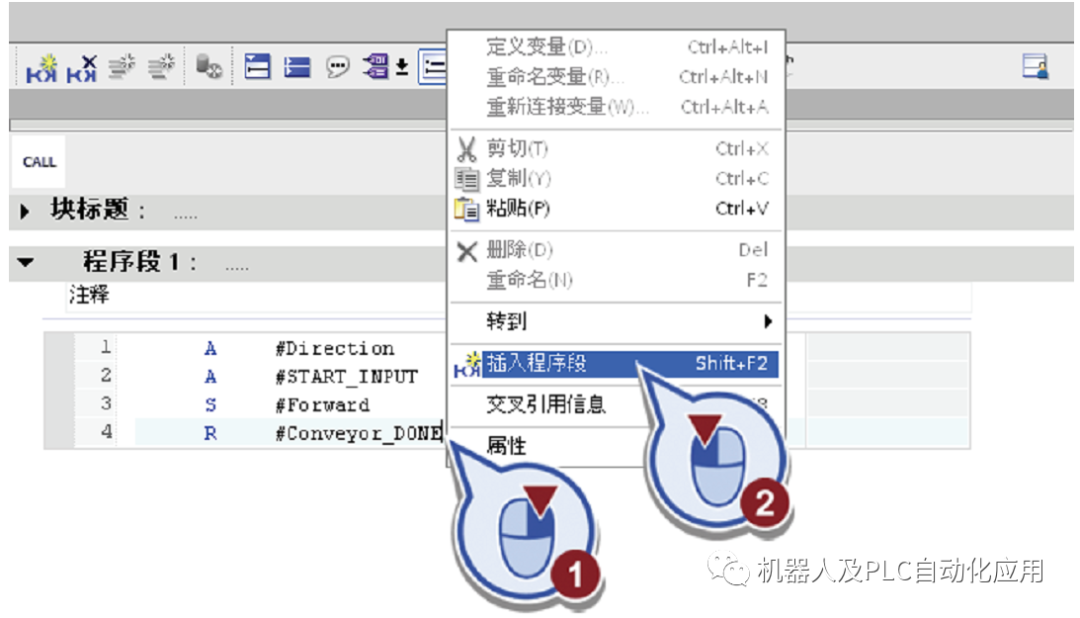
2. 在程序編輯器的一塊空白區(qū)域中右鍵單擊,然后從快捷菜單中選擇“插入程序段”插入第二個(gè)程序段。
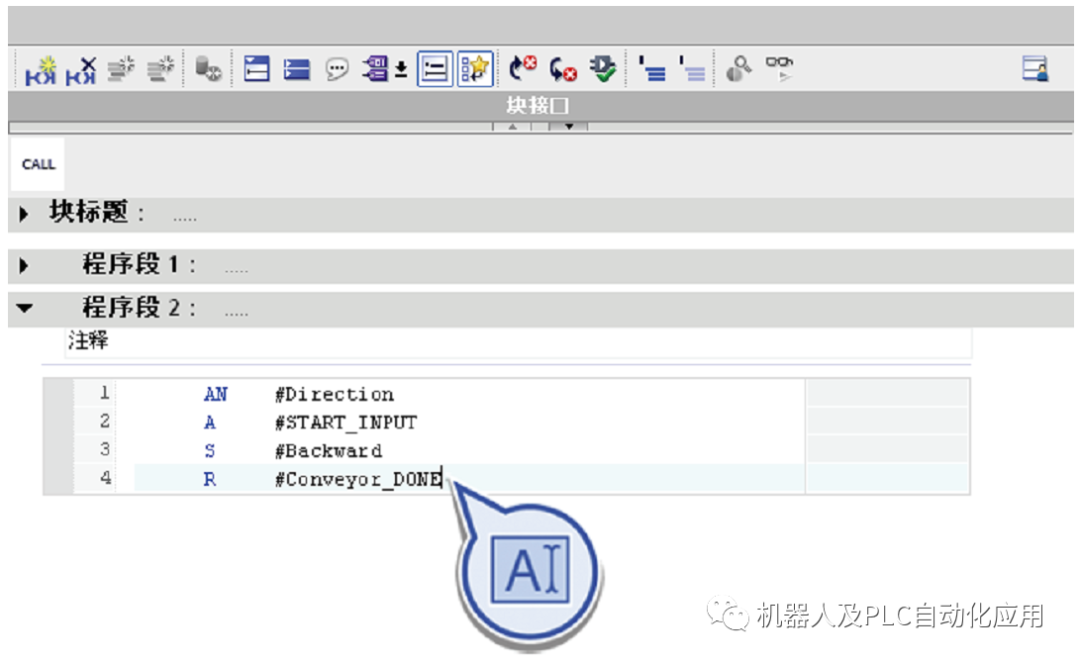
3. 定義程序段 2 的程序代碼:
– 1. 行:"AN #Direction"
– 2. 行:"A #START_INPUT"
– 3. 行:"S #Backward"
– 4. 行:"R #Conveyor_DONE"
4. 通過按下組合鍵
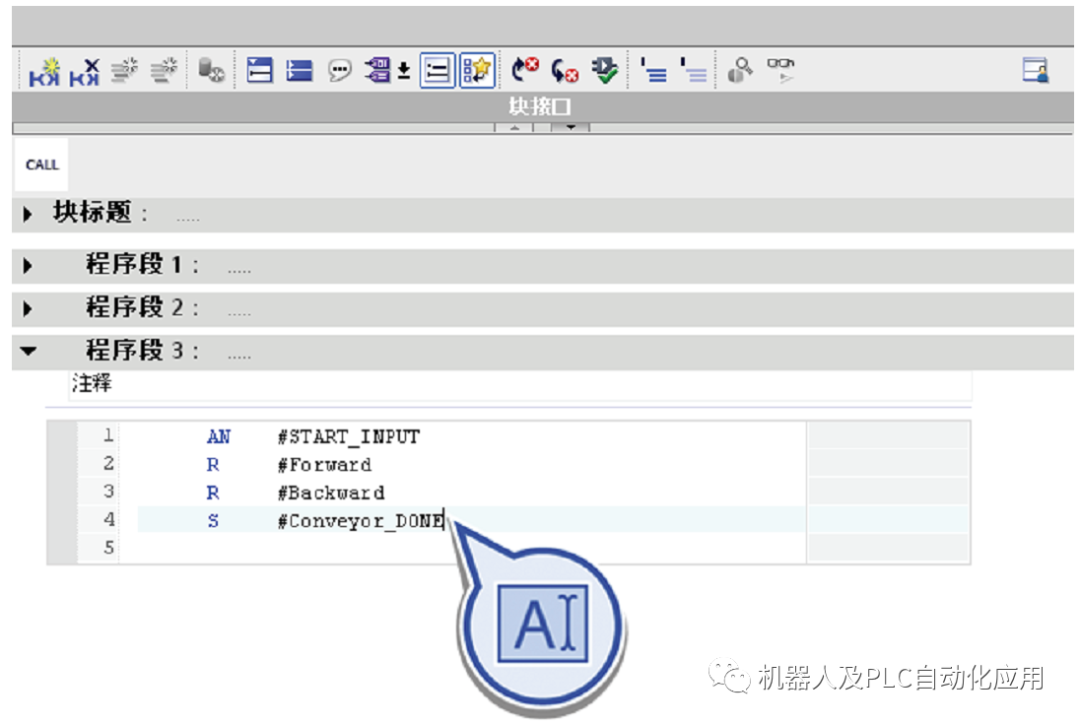
5. 定義程序段 3 的程序代碼:
– 1. 行:"AN #START_INPUT"
– 2. 行:"R #Forward"
– 3. 行:"R #Backward"
– 4. 行:"S #Conveyor_DONE"
6. 保存項(xiàng)目。
結(jié)果
成功編寫了控制傳送帶的 STL 函數(shù)。
審核編輯:劉清
-
控制器
+關(guān)注
關(guān)注
114文章
16963瀏覽量
182894 -
STL
+關(guān)注
關(guān)注
0文章
86瀏覽量
18722
發(fā)布評(píng)論請(qǐng)先 登錄
如何用Labview做傳送帶動(dòng)畫
如何實(shí)現(xiàn)單片機(jī)貨物傳送帶檢測(cè)設(shè)計(jì)
海為C60S2R在同步傳送帶中的應(yīng)用
通過YMD系列超級(jí)節(jié)能變頻器實(shí)現(xiàn)傳送帶的節(jié)能設(shè)計(jì)
橡膠傳送帶破損劃傷可以修復(fù)再使用嗎
詳解非直線傳送帶動(dòng)態(tài)跟蹤技術(shù)
26-基于單片機(jī)的傳送帶計(jì)數(shù)系統(tǒng)

礦山傳送帶導(dǎo)向輥軸承位磨損的修復(fù)指南
西門子1200PLC 傳送帶控制程序編寫及思路
怎樣使用STL函數(shù)控制傳送帶?有哪些步驟?
STL檢測(cè)傳送帶傳送方向的示例
博途:使用STL函數(shù)控制傳送帶

英國(guó)真尚有非接觸測(cè)速傳感器LP-DS100傳送帶速度測(cè)量






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論