") 自動(dòng)駕駛合成數(shù)據(jù)科普一:不做真實(shí)數(shù)據(jù)的“顛覆者”,做“杠桿”
自動(dòng)駕駛合成數(shù)據(jù)科普一:不做真實(shí)數(shù)據(jù)的“顛覆者”,做“杠桿”
前言:
在7月底的一篇文章中,九章智駕提到,數(shù)據(jù)閉環(huán)能力是自動(dòng)駕駛下半場的“入場券”,這一觀點(diǎn)在行業(yè)內(nèi)引起了廣泛共鳴。
在數(shù)據(jù)閉環(huán)體系中,仿真技術(shù)無疑是非常關(guān)鍵的一環(huán)。仿真的起點(diǎn)是數(shù)據(jù),而數(shù)據(jù)又分為真實(shí)數(shù)據(jù)跟合成數(shù)據(jù)。隨著真實(shí)數(shù)據(jù)“規(guī)模小、質(zhì)量低、使用難度大”等問題日漸暴露,合成數(shù)據(jù)越來越受重視。
顧名思義,合成數(shù)據(jù)(synthetic data)就是通過計(jì)算機(jī)技術(shù)生成的數(shù)據(jù),而不是由真實(shí)事件產(chǎn)生的數(shù)據(jù)。但合成數(shù)據(jù)又具備“可用性”,能夠在數(shù)學(xué)上或統(tǒng)計(jì)學(xué)上反映原始數(shù)據(jù)的屬性,因此也可以用來訓(xùn)練、測試并驗(yàn)證模型——OpenAI 的 GPT-4,就采用了大量前一代模型 GPT-3.5 生產(chǎn)的數(shù)據(jù)來進(jìn)行訓(xùn)練。
在2022年底,筆者曾寫過5篇關(guān)于自動(dòng)駕駛仿真的科普文,但這幾篇文章對(duì)合成數(shù)據(jù)的著墨不多。過去的兩個(gè)月里,筆者在學(xué)習(xí)合成數(shù)據(jù)的過程中,又遇到了不少疑問,帶著這些疑問,筆者請教了十多位業(yè)內(nèi)專家,然后形成“合成數(shù)據(jù)科普文”系列。
在本系列文章的撰寫過程中,筆者得到了光輪智能CEO謝晨、圖森首席科學(xué)家王乃巖、辰韜資本趙磊、復(fù)睿微電子張俊川、百度仿真專家徐志健、昆易電子方志剛、“車路慢慢”運(yùn)營者李漫漫、PanoSim王文威等朋友的支持,在此表示感謝。
自動(dòng)駕駛合成數(shù)據(jù)科普一:不做真實(shí)數(shù)據(jù)的“顛覆者”,做“杠桿”
自動(dòng)駕駛的仿真,最早就是以合成數(shù)據(jù)為主。這里講的合成數(shù)據(jù),主要是指由人工基于規(guī)則搭建的場景,這背后的技術(shù),就是業(yè)內(nèi)常說的WorldSim。通常,基于WorldSim搭建的場景,還需要用Unreal等游戲引擎來做圖像渲染。直到今天,WorldSim+游戲引擎仍然是自動(dòng)駕駛行業(yè)用得最多的合成技術(shù)之一。
看起來,基于WorldSim+游戲引擎的合成數(shù)據(jù)能在一定程度上彌補(bǔ)真實(shí)數(shù)據(jù)不足的問題,然而,在實(shí)際使用中,這種合成數(shù)據(jù)存在一個(gè)很難克服的短板:真實(shí)度還不夠高。用更專業(yè)的術(shù)語來說是“保真度”不夠高。
這一痛點(diǎn),決定了基于WorldSim+游戲引擎的合成數(shù)據(jù)基本上只能用來做測試,很難用于做算法訓(xùn)練。
為了避開WorldSim+游戲引擎技術(shù)的這一短板,有一些公司試圖將真實(shí)道路數(shù)據(jù)“轉(zhuǎn)換成數(shù)學(xué)模型”。然而,這一設(shè)想實(shí)施起來困難重重。
但合成數(shù)據(jù)“可用性”的提升,并未因此而停止。
真正能幫合成數(shù)據(jù)提升可用性的,是更高的保真度和更強(qiáng)的泛化能力。GAN、VAE和Diffusion Model等模型在自動(dòng)駕駛仿真中的應(yīng)用,已經(jīng)證明了這一點(diǎn);而當(dāng)下廣受追捧的NeRF技術(shù),也需要保證泛化能力才有可能被廣泛應(yīng)用。
當(dāng)下大熱的AI大模型能,也將在自動(dòng)駕駛仿真中占有一席之地。事實(shí)上,AI大模型+NeRF的組合,被一些從業(yè)者視為幫合成數(shù)據(jù)攻克保真度和泛化能力這兩大難題的關(guān)鍵武器。
隨著合成數(shù)據(jù)面臨的主要難題被一一攻克,真實(shí)數(shù)據(jù)“規(guī)模小、質(zhì)量低、使用難度大”的問題也不再那么令人擔(dān)憂。
通常,在談起合成數(shù)據(jù)時(shí),人們本能地以為它的主要價(jià)值是彌補(bǔ)真實(shí)數(shù)據(jù)“數(shù)量不足”的問題。但這可能是一個(gè)嚴(yán)重的誤解。
在筆者看來,真實(shí)數(shù)據(jù)的最主要問題并不是“太少”,而是“質(zhì)量低,使用難度大”。所以,哪怕真實(shí)數(shù)據(jù)的規(guī)模很大,合成數(shù)據(jù)仍然是必不可少的。不信的話,看看“最不缺”真實(shí)數(shù)據(jù)的特斯拉是怎么做的吧——特斯拉也在使用合成數(shù)據(jù)!
在國內(nèi),各家已有自動(dòng)駕駛量產(chǎn)車型上路的主機(jī)廠也不缺真實(shí)數(shù)據(jù),但這些數(shù)據(jù)的利用率究竟“高達(dá)”20%、10%還是1%,其實(shí)是存在很大的疑問的。
不過,真實(shí)數(shù)據(jù)質(zhì)量低、使用難度大給主機(jī)廠帶來的困擾,恰合也就是合成數(shù)據(jù)的用武之地。
有意思的是,不同于L4公司普遍用合成數(shù)據(jù)來“彌補(bǔ)”真實(shí)數(shù)據(jù)的不足,一些以提供合成數(shù)據(jù)服務(wù)為主業(yè)的公司更傾向于將合成數(shù)據(jù)定位為真實(shí)數(shù)據(jù)的“杠桿”。在后者看來,合成數(shù)據(jù)的使命和愿景并不是要去頂替真實(shí)數(shù)據(jù),而是要做真實(shí)數(shù)據(jù)的“放大器”,幫助主機(jī)廠或自動(dòng)駕駛公司提高真實(shí)數(shù)據(jù)的使用效率。
下面,我們將以1.1萬字的篇幅來盤點(diǎn)一下“合成數(shù)據(jù)究竟能解決真實(shí)數(shù)據(jù)的哪些痛點(diǎn)”。
一、兼顧隱私保護(hù)與數(shù)據(jù)的可用性
在真實(shí)場景中,自動(dòng)駕駛車輛的傳感器采集到的信息經(jīng)常包括車牌、人臉,但出于隱私保護(hù)的需求,這些數(shù)據(jù)通常大都無法直接使用,而是得先做脫敏或加密才行。但脫敏不僅意味著一筆額外的成本,而且,如果脫敏處理不好,數(shù)據(jù)的價(jià)值也會(huì)大打折扣,甚至根本無法使用。
但如果是根據(jù)實(shí)際需求搭建一些不包含隱私信息的數(shù)據(jù),就可在兼顧隱私保護(hù)的前提下確保數(shù)據(jù)的可用性。
在美國和歐洲,合成數(shù)據(jù)已經(jīng)是一個(gè)很大的產(chǎn)業(yè)了,但在中國,合成數(shù)據(jù)還處于萌芽階段,其中有一個(gè)重要的原因是:
美歐國家在文化和法律層面都會(huì)對(duì)隱私保護(hù)比較講究,因此,企業(yè)不得不通過采用合成數(shù)據(jù)來避免高度依賴真實(shí)數(shù)據(jù)所帶來的風(fēng)險(xiǎn);而在中國,長期以來,無論在文化層面還是法律層面,隱私都沒有受到足夠的重視,所以,企業(yè)可以“肆無忌憚”地使用真實(shí)數(shù)據(jù),這也導(dǎo)致了中國缺乏合成數(shù)據(jù)發(fā)展的土壤。
但情況正在發(fā)生變化。一方面,在中國,普通個(gè)體關(guān)于隱私保護(hù)的權(quán)利意識(shí)在覺醒;另一方面,法律層面也不允許企業(yè)肆意濫用各種隱私數(shù)據(jù)了。
單從隱私保護(hù)的角度考慮,國內(nèi)公司也將越來越多地降低對(duì)真實(shí)數(shù)據(jù)的依賴程度。
二、避開高精地圖的資質(zhì)障礙
除了圖商等極少數(shù)有資質(zhì)的公司,大多數(shù)公司都無法通過路采獲取真實(shí)數(shù)據(jù)的方式來繪制高精地圖,為了避開這一問題,很多公司推出了“去高精地圖”方案,但這一方案對(duì)公司的前融合算法能力、規(guī)控算法能力都提出了新的挑戰(zhàn),實(shí)際上,真正能落地的公司并不多。
但如果能用合成數(shù)據(jù)來制作高精地圖,那問題就簡單得多了。
在中國,我們尚未看到有公司采用合成數(shù)據(jù)來制作高精地圖,但在美國,已經(jīng)有了類似的先例了。
2021年11月,在一場題為 Under the Hood的活動(dòng)上,Cruise仿真技術(shù)戰(zhàn)略主管 Sid Gandhi 披露,在向新的城市拓展時(shí),他們不必重新繪制城市地圖來跟蹤車道變更或街道封閉等“不可避免發(fā)生的環(huán)境變化”,而是利用一項(xiàng)名為 WorldGen 的技術(shù),準(zhǔn)確、大規(guī)模地生成整個(gè)城市,“從奇特的布局到最小的細(xì)節(jié)”。
為了確保最佳的世界創(chuàng)建,Cruise 考慮了一天 24 小時(shí)不同時(shí)間段的照明和天氣條件等因素,甚至系統(tǒng)地測量了舊金山一系列路燈的光線。
對(duì)于無法在現(xiàn)實(shí)路況下收集的特定場景,Cruise則使用 Morpheus。Morpheus 是一個(gè)可以根據(jù)地圖上的特定位置生成合成數(shù)據(jù)的系統(tǒng)。
據(jù)曾擔(dān)任過Cruise仿真負(fù)責(zé)人的光輪智能CEO謝晨說:
Crusie的 WorldGen和Morpheus并不是用合成數(shù)據(jù)來做高精地圖,而是對(duì)真實(shí)世界做3D重建。但無論如何,將車道變更或街道封閉及“從奇特的布局到最小的細(xì)節(jié)”都納入3D重建中,重建后的信息元素已經(jīng)很接近高精地圖了。
在美國,自動(dòng)駕駛公司采集真實(shí)道路數(shù)據(jù)并不會(huì)受到如在中國這般嚴(yán)格的限制,但Crusie仍然采用了合成數(shù)據(jù),這給那些被高精地圖政策束縛了手腳的中國公司提供了一種新思路。
此外,今后受數(shù)據(jù)合規(guī)相關(guān)法規(guī)政策影響的,就不限于高精地圖數(shù)據(jù)了,還有用于感知算法訓(xùn)練的數(shù)據(jù)回傳。
(這一點(diǎn),九章在6月30日發(fā)的《“去高精地圖”跟“輕高精地圖”有啥區(qū)別?落地的挑戰(zhàn)又是啥?》一文的第七章“感知算法訓(xùn)練或?qū)⑹艿綌?shù)據(jù)合格政策的影響”部分已做過詳細(xì)的分析,并在此后也從其他平臺(tái)發(fā)布的類似內(nèi)容中得到進(jìn)一步印證,在此不再贅述。)
可以想見,接下來,用真實(shí)道路數(shù)據(jù)做算法訓(xùn)練的難度是越來越大了——不是沒法做,關(guān)鍵是對(duì)車端脫敏的要求太高了,甚至可能還需要跟有測繪資質(zhì)的圖商合作。
受這一政策沖擊較少的公司,應(yīng)該就是那些率先開始擁抱合成數(shù)據(jù)的公司。
三、高效生成在真實(shí)場景中很難獲取的Corner Case
大家都清楚,自動(dòng)駕駛系統(tǒng)很難徹底取代人,最關(guān)鍵的原因是對(duì)各種corner case的應(yīng)對(duì)能力不足,而應(yīng)對(duì)能力的不足又源于數(shù)據(jù)量不夠。這正是合成數(shù)據(jù)大有可為的地方。
大量的corner case,在真正發(fā)生前,沒有人能想得到——預(yù)期功能安全第三象限里面的“unknown,unsafe”一類,所以無法在真實(shí)道路上做模擬。這類corner case,沒法通過基于人工規(guī)則的合成數(shù)據(jù)(WorldSim)來生成,也沒法通過對(duì)真實(shí)世界做3D重建的技術(shù)(NeRF)來生成,但有望通過基于AIGC的合成數(shù)據(jù)來獲取。
有的corner case,盡管人能想象得到“大概會(huì)怎樣”,但畢竟太危險(xiǎn)(known,unsafe),所以,也不適合在真實(shí)道路上做模擬。這種corner case,沒法通過NeRF技術(shù)來生成,但可以通過WorldSim來生成。當(dāng)然,也有望通過AIGC來生成。
有的corner case,算不上有多么unsafe,但在真實(shí)世界中確實(shí)很罕見。如雨、霧、雪和極端光線等極端天氣跟某種極端交通流的組合。這些,也需要通過合成數(shù)據(jù)技術(shù)(同上,不包括NeRF)來生成。
(為何這一章會(huì)在多處提到了有許多corner case無法通過當(dāng)下大熱的NeRF技術(shù)來生成?這個(gè)問題的答案,我們將在本系列的第二篇文章中做詳細(xì)的闡釋。)
有許多corner case,真實(shí)數(shù)據(jù)中其實(shí)有的,但無奈真數(shù)據(jù)中corner case的密度太低,挖掘成本太高,這個(gè)時(shí)候,工程師們?nèi)绻麤]有足夠的耐心或“實(shí)在等不及”,則直接選擇合成數(shù)據(jù)便是最佳策略。
有了合成數(shù)據(jù),主機(jī)廠或自動(dòng)駕駛公司便可在幾小時(shí)內(nèi)模擬數(shù)百萬個(gè)行人(現(xiàn)實(shí)中,這通常需要幾個(gè)月才能完成)。這些模擬可能涵蓋不同照明條件、目標(biāo)位置和惡劣環(huán)境下(暴雨、極寒、濃霧等)的示例。或者,可以插入隨機(jī)噪聲來模擬臟污的攝像頭、霧水和其他視覺障礙物。
此外,真實(shí)數(shù)據(jù)由于高度受制于采集場景的限制,所以,corner case在樣本的分布上也很難有效滿足算法的需求。而合成數(shù)據(jù),可以有針對(duì)性地生成分布狀況更滿足訓(xùn)練需求的corner case,這更有助于提升算法的性能。
四、“非必要,不采集”,降低數(shù)據(jù)采集、回傳及存儲(chǔ)環(huán)節(jié)的成本
許多主機(jī)廠都聲稱已經(jīng)量產(chǎn)上路的自動(dòng)駕駛車型每天都在回傳數(shù)據(jù),但這個(gè)所謂的“數(shù)據(jù)回傳”究竟實(shí)現(xiàn)到什么程度、所謂的“影子模式”是否真的落地了,一直是個(gè)玄學(xué)。
之前只有為數(shù)不多的測試車的時(shí)候,數(shù)據(jù)的問題相對(duì)好辦,畢竟,“回傳”可以通過硬盤來解決,篩選可以在云端做,然而,在量產(chǎn)車上,通過硬盤來解決數(shù)據(jù)“回傳”的道路走不通了,篩選出有效數(shù)據(jù)這個(gè)工作就要在車端完成。
在3月份的《自動(dòng)駕駛數(shù)據(jù)閉環(huán)系列之一:理想豐滿,現(xiàn)實(shí)骨感》一文中,我們提到,在量產(chǎn)車上采集數(shù)據(jù)會(huì)占用一些系統(tǒng)資源,比如計(jì)算、存儲(chǔ)等。
理論上,可以假設(shè)計(jì)算資源、網(wǎng)絡(luò)帶寬等都不受限制,但在實(shí)際落地過程中,如何保證采集數(shù)據(jù)不影響量產(chǎn)車上自動(dòng)駕駛系統(tǒng)的正常運(yùn)行,例如,如何不影響自動(dòng)駕駛系統(tǒng)的延遲等,這是一個(gè)需要解決的問題。
因此,在設(shè)計(jì)的時(shí)候,就需要考慮到采集數(shù)據(jù)等對(duì)自動(dòng)駕駛系統(tǒng)運(yùn)行的影響。
此外,在數(shù)據(jù)量特別大的時(shí)候,數(shù)據(jù)回傳的成本也會(huì)非常高。
單車每日回傳的數(shù)據(jù)量大概為百兆級(jí)。在研發(fā)階段,車輛總數(shù)可能只有幾十輛或者幾百輛,但是到了量產(chǎn)階段,車輛數(shù)目的量級(jí)可以達(dá)到上萬、幾十萬甚至更多。那么,量產(chǎn)階段,整個(gè)車隊(duì)日產(chǎn)生的數(shù)據(jù)量就是很大的數(shù)字。據(jù)某數(shù)據(jù)管理供應(yīng)商提供的信息,某造車新勢力每個(gè)月僅用來做數(shù)據(jù)回傳的流量費(fèi)就高達(dá)“大幾千萬”。
另一方面,急劇增加的數(shù)據(jù)量還給存儲(chǔ)空間以及數(shù)據(jù)處理的速度都帶來了挑戰(zhàn)。
量產(chǎn)之后,數(shù)據(jù)處理的延遲需要和研發(fā)階段保持在同一個(gè)量級(jí)。但如果底層的基礎(chǔ)設(shè)施跟不上,數(shù)據(jù)處理的延遲就會(huì)隨著數(shù)據(jù)量的增長而相應(yīng)地增加,這樣會(huì)極大地拖慢研發(fā)流程的進(jìn)度。對(duì)于系統(tǒng)迭代來講,這種效率的降低是不可接受的。
一位業(yè)界專家告訴九章智駕:
目前,我們還沒有看到哪家公司具備處理量產(chǎn)車上回傳的大規(guī)模數(shù)據(jù)的能力。即使是某家在數(shù)據(jù)閉環(huán)層面做得比較前沿的造車新勢力,即便是每輛量產(chǎn)車每天只回傳5分鐘的數(shù)據(jù),他們也難以應(yīng)對(duì)這樣的數(shù)據(jù)量,因?yàn)楫?dāng)前的存儲(chǔ)設(shè)備、文件讀取系統(tǒng)、計(jì)算工具等都還無法應(yīng)對(duì)極大的數(shù)據(jù)量。
要應(yīng)對(duì)越來越大的數(shù)據(jù)量,底層的基礎(chǔ)設(shè)施以及平臺(tái)的設(shè)計(jì)都需要相應(yīng)升級(jí)。
工程團(tuán)隊(duì)需要開發(fā)完善的數(shù)據(jù)訪存SDK。由于視覺數(shù)據(jù)、雷達(dá)數(shù)據(jù)的文件尺寸都非常大,數(shù)據(jù)的訪問、查詢、跳轉(zhuǎn)、解碼過程都需要效率足夠高,否則會(huì)大大拖慢研發(fā)進(jìn)度。
如果能做到盡可能多地使用合成數(shù)據(jù)來模擬一些場景,只有在合成數(shù)據(jù)無法滿足要求的時(shí)候再回傳真實(shí)數(shù)據(jù),即“非必要,不采集、不回傳”,那跟數(shù)據(jù)采集、回傳和存儲(chǔ)相關(guān)的成本就會(huì)大幅度下降。
五、自帶完美標(biāo)簽,不用再做標(biāo)注
車端數(shù)據(jù)在回傳到云端后,需要先做好標(biāo)注后才能使用。據(jù)稱,在大模型用于數(shù)據(jù)標(biāo)注后,已經(jīng)有高達(dá)80%的數(shù)據(jù)標(biāo)注可以通過自動(dòng)化的方式來完成,但還有至少20%涉及復(fù)雜場景、多目標(biāo)、語義復(fù)雜的數(shù)據(jù)需要由人工來完成“精標(biāo)”。
當(dāng)下大熱的BEV+Transformenr技術(shù),對(duì)數(shù)據(jù)標(biāo)注的需求進(jìn)一步上升。
以往,需要標(biāo)注的主要是前視攝像頭的數(shù)據(jù),2D 標(biāo)注框+ 3D 位置就已經(jīng)是標(biāo)注的全部內(nèi)容了;而今,在BEV+Transformer方案下, 所有相關(guān)的攝像頭(可能超過7個(gè))能看到的所有障礙物、車道線、車輛的運(yùn)動(dòng)狀態(tài)都需要對(duì)應(yīng)的標(biāo)注, 并且還要統(tǒng)一在同一坐標(biāo)系下,還有大量的語義信息也需要標(biāo)注,而標(biāo)注成本,也從之前的每幀10元左右上漲到每幀30-40元,甚至更高。
人工標(biāo)注的工作量遠(yuǎn)超外人想象。據(jù)毫末智行數(shù)據(jù)智能科學(xué)家賀翔在6月底的一場自動(dòng)駕駛公開課上的說法,一張關(guān)于十字路口的照片,要把位置、天氣、擁擠狀況、其道路使用者、廣告牌等各種元素都標(biāo)注出來,并能在此基礎(chǔ)上做場景篩選,可能100個(gè)標(biāo)簽也不夠用。
假如車上有8-12個(gè)攝像頭、1-2個(gè)激光雷達(dá),10秒鐘的視頻里面可能有上千張圖片,標(biāo)注成本得幾千元。
一般的檢測框,一分鐘的內(nèi)容,標(biāo)注需要一小時(shí)左右;點(diǎn)云分割,一分鐘的內(nèi)容,標(biāo)注需要幾個(gè)小時(shí);但對(duì)更復(fù)雜的任務(wù)做4D標(biāo)注,可能一分鐘的任務(wù)需要花超過一天時(shí)間才能完成。
后面要做端到端的算法訓(xùn)練,在給這一幀的內(nèi)容打標(biāo)簽時(shí),還得考慮該標(biāo)簽如何跟其他幀的內(nèi)容做關(guān)聯(lián)。
總的趨勢是,自動(dòng)駕駛行業(yè)對(duì)標(biāo)注的要求越來越高了,這意味著,投入到一分鐘視頻上的標(biāo)注成本越來越高了。
在7月底的一場沙龍上,某自動(dòng)駕駛公司COO稱,在數(shù)據(jù)處理的高峰期,他們曾同時(shí)跟超過100家標(biāo)注公司合作,不僅直接成本很高,而且,供應(yīng)商管理的復(fù)雜度也極高。
做人工標(biāo)注,如何在數(shù)據(jù)量極大的情況下,保證標(biāo)注結(jié)果的準(zhǔn)確率、一致性也是一大挑戰(zhàn)。想象一下,標(biāo)注工人連續(xù)幾天坐在辦公桌前做同樣的工作時(shí)間,幾乎就像在工廠的傳送帶上工作一樣, 在這種情形下,ta一定會(huì)時(shí)不時(shí)地犯一些奇怪的錯(cuò)誤。
如果標(biāo)注的結(jié)果不準(zhǔn)確、不完整,那基于這些數(shù)據(jù)訓(xùn)練出來的模型的性能就會(huì)受到影響。
但合成數(shù)據(jù)自帶圖像和激光雷達(dá)的“真值”標(biāo)簽,包括 2D 和 3D 邊界框、語義和實(shí)例分割、深度、光流、運(yùn)動(dòng)矢量、關(guān)鍵點(diǎn)等。并且,對(duì)被遮擋行人/物體這種很難做人工標(biāo)注的場景,合成數(shù)據(jù)也可以自帶完美標(biāo)簽。
在成本方面,與需要標(biāo)注的真實(shí)數(shù)據(jù)相比,自帶標(biāo)簽的合成數(shù)據(jù)也具有明顯優(yōu)勢。
合成數(shù)據(jù)服務(wù)商AI.Reverie 認(rèn)為,人工標(biāo)注一張圖片可能需要6美元(這還不算數(shù)據(jù)回傳、篩選及存儲(chǔ)的成本),但通過合成數(shù)據(jù)技術(shù)生成同樣一張自帶標(biāo)簽的圖片只需要6美分。
誠然,合成數(shù)據(jù)無法完全取代真實(shí)數(shù)據(jù),但合成數(shù)據(jù)使用率的上升,對(duì)真實(shí)數(shù)據(jù)的依賴度下降,就可以減少因?yàn)檎鎸?shí)數(shù)據(jù)“不好用”而產(chǎn)生的不必要的成本。
全球數(shù)據(jù)標(biāo)注龍頭公司Scale AI已敏銳地意識(shí)到了這一趨勢。
過去幾年,算法訓(xùn)練對(duì)數(shù)據(jù)標(biāo)注的饑渴需求,造成了一個(gè)很有意思的現(xiàn)象是:自動(dòng)駕駛公司和主機(jī)廠的自動(dòng)駕駛業(yè)務(wù)都沒掙到錢,但做數(shù)據(jù)標(biāo)注的公司卻掙到錢了。全球數(shù)據(jù)標(biāo)注龍頭Scale AI甚至因此而估值超過73億美元。
不過,Scale AI也已經(jīng)意識(shí)到,隨著合成數(shù)據(jù)的應(yīng)用逐漸深入,數(shù)據(jù)標(biāo)注業(yè)務(wù)的營收會(huì)受到不小的沖擊。因此,在2022上半年,該公司推出了一個(gè)名為Scale Synthetic的合成數(shù)據(jù)平臺(tái),宣布進(jìn)入合成數(shù)據(jù)產(chǎn)業(yè)。他們甚至稱,合成數(shù)據(jù)是自己在2022年的“首要任務(wù)”。
數(shù)據(jù)標(biāo)注龍頭進(jìn)軍合成數(shù)據(jù),邏輯是“在別人能干掉我之前,我先掌握他們的技能,大不了自己干掉自己”,這算是一場自我革命了。
作為被合成數(shù)據(jù)“革命”的對(duì)象,數(shù)據(jù)標(biāo)注公司積極擁抱合成數(shù)據(jù),這又從反面進(jìn)一步印證了自帶標(biāo)簽的合成數(shù)據(jù)相比于真實(shí)數(shù)據(jù)的優(yōu)勢。
六、可編程,可交互
看起來,各家公司手上都積累了不少真實(shí)數(shù)據(jù),但真實(shí)數(shù)據(jù)用來做仿真,有個(gè)很嚴(yán)重的痛點(diǎn)是:復(fù)用性差。
比如,在做路采的時(shí)候,車輛的芯片平臺(tái)、傳感器架構(gòu)及制動(dòng)系統(tǒng)是怎樣的,那我在仿真系統(tǒng)里做測試時(shí),車輛的這些硬件配置也必須跟路采時(shí)所用的車輛配置一致。
某工具鏈公司的仿真負(fù)責(zé)人說:
在用真實(shí)道路數(shù)據(jù)做仿真的情況下,一旦傳感器的位置或者型號(hào)有變更,這一組數(shù)據(jù)的價(jià)值就降低,甚至?xí)鲝U’。
究其原因,真實(shí)數(shù)據(jù)在使用時(shí)無法調(diào)整任何參數(shù),而只能做簡單的“回放”——也被稱為“回灌”(LogSim)。
復(fù)睿微電子仿真負(fù)責(zé)人張峻川在一次公開分享中提到,WorldSim(用合成數(shù)據(jù)做仿真)像在玩游戲,而LogSim(用真實(shí)道路數(shù)據(jù)做仿真)則更像是電影,你只能看,沒法參與,沒法生成與原始記錄不同的傳感器數(shù)據(jù),因此,LogSim天然沒法解決交互性的問題。
可以想見,沒法解決交互問題的LogSim,只能用于測試驗(yàn)證一個(gè)現(xiàn)成的算法“是不是OK”,卻不能用于從頭來訓(xùn)練一個(gè)算法。
確有一些公司曾嘗試把采集到的場景里面的元素都完成參數(shù)化,但目前還沒有成熟的案例落地。
但合成數(shù)據(jù)天然具有可編程性,很多參數(shù)都是可以調(diào)整的,因此,數(shù)據(jù)復(fù)用的難度將大幅度降低。
(合成數(shù)據(jù)的可編程性或泛化能力、可復(fù)用性,因AI的參與度而有所不同,總的來說,AI的參與度越高,合成數(shù)據(jù)的泛化能力越強(qiáng),這一點(diǎn),我們將在本系列的第二篇文章中做更詳細(xì)的分析,在此暫不贅述。)
豐田及其投資的合成數(shù)據(jù)公司Parallel Domain都將合成數(shù)據(jù)稱為 Programmable Data即“可編程數(shù)據(jù)”。Parallel Domain在其官網(wǎng)上稱:“我們可以對(duì)我們希望在訓(xùn)練數(shù)據(jù)中獲得的任何輸出進(jìn)行編程......通過組合參數(shù)掃描,為每輛車生成數(shù)據(jù),乘以每種照明條件、每種天氣條件,每種油漆顏色。”
英偉達(dá)在對(duì)外介紹合成數(shù)據(jù)時(shí)經(jīng)常提到一個(gè)詞“域隨機(jī)化”(Domain Randomization),即通過在合成數(shù)據(jù)的生成過程中引入各種隨機(jī)性和變化,使得生成的數(shù)據(jù)能夠覆蓋更廣泛的場景。
英偉達(dá)說的“域隨機(jī)化”,包括改變某個(gè)特定對(duì)象的顏色、光照、紋理、材質(zhì)、變換等多種屬性,也包括添加和修改傳感器的位置和參數(shù),以及定義其他道路使用者的運(yùn)動(dòng)狀態(tài)。此外,改變一天的時(shí)間、太遠(yuǎn)的位置、溫度、道路的濕度,也是“域隨機(jī)化”的一部分。
在理想的情況下,用轎車去采集的數(shù)據(jù),如果把視角調(diào)整成卡車視角,那這一組數(shù)據(jù)就可以用于訓(xùn)練卡車的感知算法。
專注于人類數(shù)據(jù)的Synthesis AI甚至能夠以編程方式自定義人的面部數(shù)據(jù)集。為滿足DMS方向客戶的需求,Synthesis 生成了大約 100,000 個(gè)涵蓋不同性別、年齡、體重指數(shù)、膚色和種族的“合成人”。
通過該平臺(tái),數(shù)據(jù)科學(xué)家可以定制化身的姿勢以及頭發(fā)、面部表情、注釋方向、發(fā)型、服裝(例如面具和眼鏡)以及環(huán)境方面(例如照明,甚至虛擬相機(jī)的“鏡頭類型”)。
對(duì)合成數(shù)據(jù)做編程的最大意義是,可以讓corner cace都可以泛化出數(shù)千個(gè)“變體”,由此,訓(xùn)練出來的模型會(huì)具有很強(qiáng)的魯棒性和泛化能力,從而更容易適應(yīng)真實(shí)世界中的各種變化和不確定性。
此外,合成數(shù)據(jù)生成過程的參數(shù)化,使機(jī)器學(xué)習(xí)工程師能夠更好地控制每次迭代,并讓數(shù)據(jù)集中已存在內(nèi)容的更有可追溯性。
七、 通過隨機(jī)化及調(diào)整場景分布來解決“過擬合”的問題
在學(xué)習(xí)合成數(shù)據(jù)的過程中,筆者注意到,不少開發(fā)者都反映,基于真實(shí)數(shù)據(jù)訓(xùn)練出的模型,很容易出現(xiàn)“過擬合”(Overfitting)的問題。
所謂過擬合,指模型在訓(xùn)練數(shù)據(jù)上表現(xiàn)良好,但在新的、未見過的數(shù)據(jù)上表現(xiàn)較差的情況。當(dāng)模型過度擬合時(shí),它學(xué)習(xí)到了訓(xùn)練數(shù)據(jù)中的細(xì)節(jié)和噪聲,而無法泛化到新的數(shù)據(jù)上。
那么,真實(shí)數(shù)據(jù)是不是要比合成數(shù)據(jù)更有可能引發(fā)模型的“過擬合”問題?
光輪智能CEO謝晨認(rèn)為:
嚴(yán)格地說,“過擬合”跟訓(xùn)練數(shù)據(jù)是真實(shí)數(shù)據(jù)還是合成數(shù)據(jù)并沒有必然關(guān)系,真正導(dǎo)致“過擬合”的,是訓(xùn)練數(shù)據(jù)集中的場景分布跟真實(shí)世界不一致,導(dǎo)致數(shù)據(jù)集可能無法捕捉到真實(shí)世界的復(fù)雜性和多樣性——而不管這個(gè)“數(shù)據(jù)集”究竟是真實(shí)數(shù)據(jù)集還是合成數(shù)據(jù)集。
謝晨舉例說:
比如,很多自動(dòng)駕駛系統(tǒng)在晚上或者雨天表現(xiàn)不太好,這是因?yàn)樗麄儺?dāng)初做訓(xùn)練數(shù)據(jù)采集的時(shí)候,采的大部分都是白天和晴天的數(shù)據(jù)。
英偉達(dá)仿真產(chǎn)品經(jīng)理Matt Cragun也做過類似的解釋:
如果大部分真實(shí)數(shù)據(jù)都是在白天條件下收集的,那么在該數(shù)據(jù)集上訓(xùn)練的算法在夜間或弱光條件下可能表現(xiàn)不佳。
再比如,仿真公司Applied Intuition發(fā)現(xiàn),某個(gè)感知模型很難準(zhǔn)確地檢測到騎自行車的人和起摩托車的人,原因在于,在用于訓(xùn)練這個(gè)模型的真實(shí)數(shù)據(jù)集中,騎行者出現(xiàn)的頻率遠(yuǎn)低于車輛和步行者——前者出現(xiàn)的頻率不到后者的1/170。
那么,該如何避免“過擬合”的問題呢?筆者從ChatGPT 3.5上得到的對(duì)策有8條,如下圖所示:
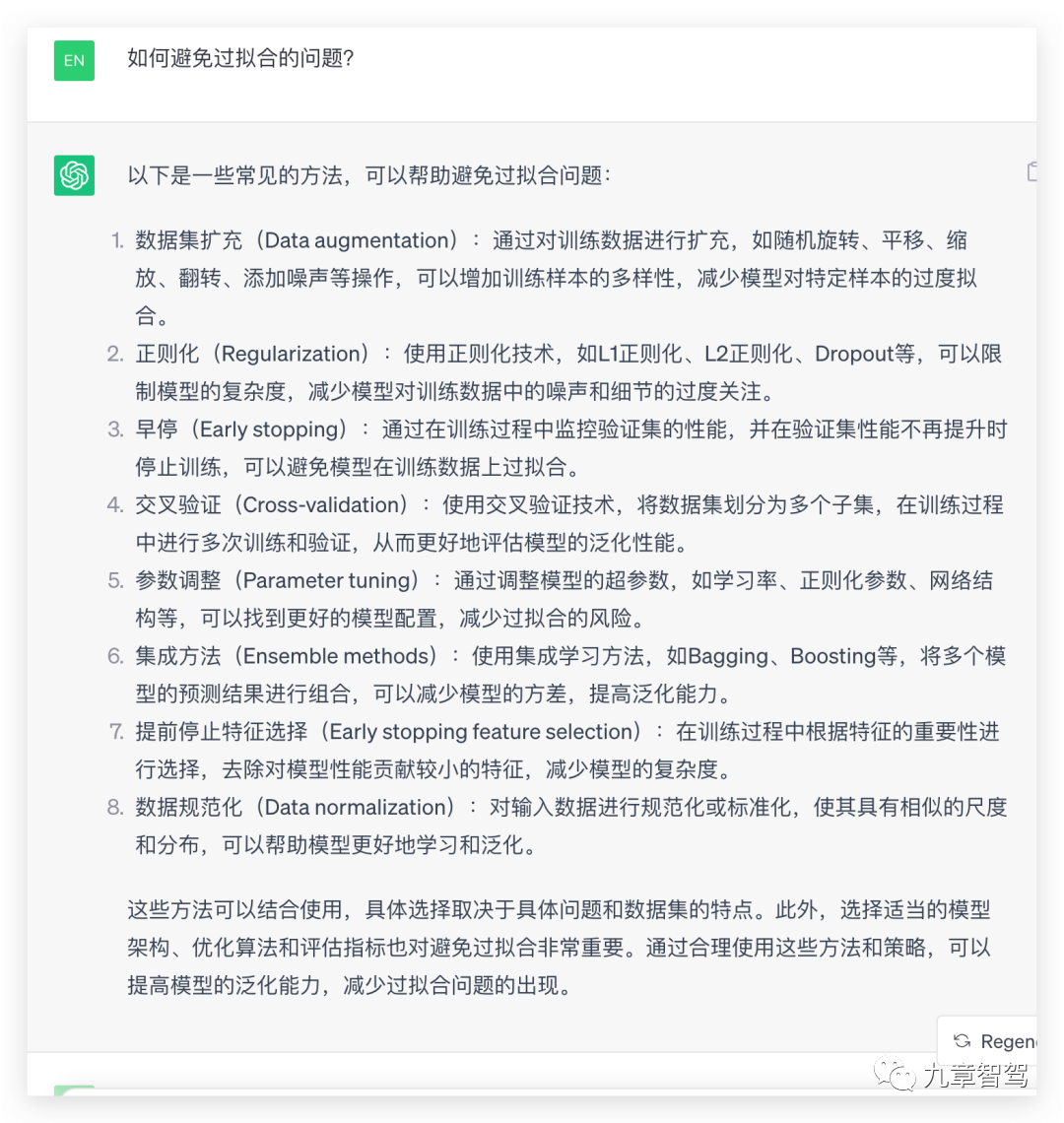
其中,跟訓(xùn)練數(shù)據(jù)相關(guān)的對(duì)策是如下兩條:
1.通過對(duì)訓(xùn)練數(shù)據(jù)進(jìn)行擴(kuò)充,如隨機(jī)旋轉(zhuǎn)、平移、縮放、翻轉(zhuǎn)、添加噪聲等操作,增加訓(xùn)練樣本的多樣性;
2.對(duì)輸入數(shù)據(jù)進(jìn)行規(guī)范化或標(biāo)準(zhǔn)化,使其具有相似的尺度和分布,可以幫助模型更好地學(xué)習(xí)和泛化。
鑒于真實(shí)數(shù)據(jù)是“死的”,無法編程,因此,要對(duì)真實(shí)數(shù)據(jù)做如上操作,基本上是不太可能的。所以,更容易用來解決“過擬合”問題的訓(xùn)練數(shù)據(jù),基本只能是合成數(shù)據(jù)了。
英偉達(dá)主要通過合成數(shù)據(jù)的域隨機(jī)化來克服“過擬合”問題。所謂域隨機(jī)化,即在合成數(shù)據(jù)的生成過程中引入各種隨機(jī)性和變化(這也是對(duì)合成數(shù)據(jù)做泛化的一種特殊形式),使得生成的數(shù)據(jù)能夠覆蓋更廣泛的場景。
比如,英偉達(dá)曾在測試中發(fā)現(xiàn),某個(gè)基于合成數(shù)據(jù)訓(xùn)練出來的模型未能在大多數(shù)真實(shí)圖像上充分檢測到門,因?yàn)樗谀M中過度擬合了門的紋理。為了防止門的紋理過度擬合,英偉達(dá)仿真團(tuán)隊(duì)在 30 種不同的類木紋理中對(duì)門的紋理應(yīng)用了隨機(jī)化。
與此類似的是,為了使模型對(duì)墻壁上的 QR 碼等噪聲具有魯棒性,英偉達(dá)仿真團(tuán)隊(duì)還應(yīng)用了 DR overtexture,將墻壁的紋理隨機(jī)化為不同的紋理,包括 QR 碼和其他合成紋理。
再比如,英偉達(dá)還發(fā)現(xiàn),某個(gè)基于合成數(shù)據(jù)訓(xùn)練的模型在低溫照明條件下有很多誤報(bào),其原因在于,仿真環(huán)境中的照明保持穩(wěn)定和恒定,而在現(xiàn)實(shí)中,照明條件多種多樣。為避免同類問題再次發(fā)生,英偉達(dá)仿真團(tuán)隊(duì)在合成數(shù)據(jù)中的天花板燈上添加了光溫 域隨機(jī)化,以隨機(jī)化燈光的移動(dòng)、強(qiáng)度和顏色。
曾擔(dān)任過英偉達(dá)自動(dòng)駕駛仿真主管的謝晨也認(rèn)同英偉達(dá)在解決“過擬合”問題上采取的思路。
謝晨補(bǔ)充說:
光輪智能在生產(chǎn)合成數(shù)據(jù)的過程中,堅(jiān)持的一個(gè)原則是“守正出奇”,即在客戶特別需要的增量數(shù)據(jù)方面,他們按照客戶的要求做定制;在客戶不特別提要求的地方,他們盡量讓各種場景的分布貼近真實(shí)世界。
比如,將高速路和城市道路的分布比例、白天和晚上的分布比例、雨雪天氣和晴天的分布比例設(shè)置得盡量跟真實(shí)世界一致。
基于這種數(shù)據(jù)訓(xùn)練出的模型,就不太容易出現(xiàn)“過擬合”的問題。
我們在上文中提到,針對(duì)基于真實(shí)數(shù)據(jù)訓(xùn)練出的感知模型很難檢測到騎行者的問題,Applied Intution公司將其原因歸結(jié)為“騎自行車和騎摩托車手的人在數(shù)據(jù)集中出現(xiàn)的頻率遠(yuǎn)低于行人和汽車”,然后,他們采取的對(duì)策是,往訓(xùn)練數(shù)據(jù)集中添加一些騎行者出現(xiàn)頻率比較高的合成數(shù)據(jù)。
Applied Intution將原本基于100%的真實(shí)數(shù)據(jù)集訓(xùn)練出來的模型設(shè)定為“基線模型”,然后在實(shí)驗(yàn)中發(fā)現(xiàn),與基線模型相比,將合成數(shù)據(jù)跟真實(shí)數(shù)據(jù)混合在一起做訓(xùn)練,感知模型對(duì)騎行者的識(shí)別結(jié)果得到了顯著改善。
Applied Intuion進(jìn)一步發(fā)現(xiàn),先在合成數(shù)據(jù)上對(duì)模型做預(yù)訓(xùn)練,然后再在 100% 的真實(shí)數(shù)據(jù)上對(duì)其進(jìn)行微調(diào),則模型對(duì)騎行者的識(shí)別能力可顯示出特別明顯的提升——無論合成數(shù)據(jù)在訓(xùn)練數(shù)據(jù)集中的占比是多少,基于該數(shù)據(jù)集訓(xùn)練出的模型在性能上始終優(yōu)于基線模型。
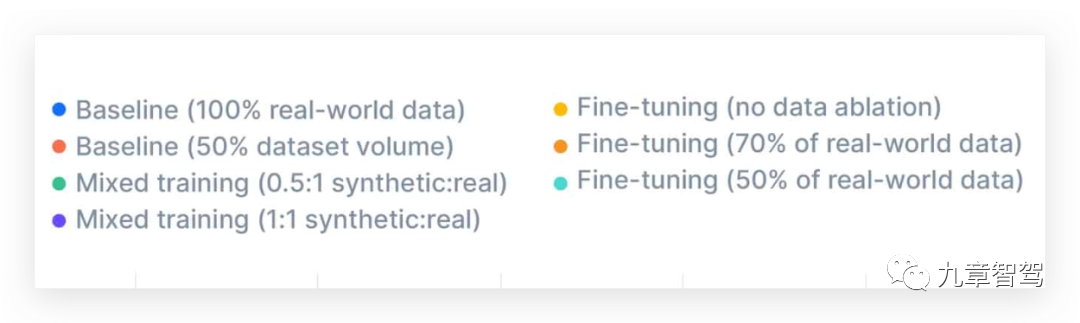

(按類別的 mAP 分?jǐn)?shù)。與 100% 真實(shí)世界數(shù)據(jù)的基線相比,混合訓(xùn)練和微調(diào)實(shí)驗(yàn)提高了騎行者的 mAP 分?jǐn)?shù)。圖片摘自Applied Intution官網(wǎng)。)
在下方的兩組圖片中,左側(cè)的圖片顯示,僅根據(jù)真實(shí)世界數(shù)據(jù)訓(xùn)練的基線模型無法檢測到距自車較近的騎行者,而右側(cè)圖片則顯示,根據(jù)合成數(shù)據(jù)進(jìn)行預(yù)訓(xùn)練的可以模型成功檢測到該騎行者。


可以看到,盡管“過擬合”跟訓(xùn)練數(shù)據(jù)是真實(shí)數(shù)據(jù)還是合成數(shù)據(jù)并沒有必然關(guān)系,但由于合成數(shù)據(jù)更容易解決“分布比例”的問題,因此,總體上來說,合成數(shù)據(jù)確實(shí)更有可能解決“過擬合”的問題。
在談到“過擬合”的話題時(shí),謝晨進(jìn)一步解釋說:
“過擬合”是用一個(gè)低維的東西去打高維時(shí)比較常見的問題,在本質(zhì)上,這其實(shí)是一個(gè)小模型的問題,往后看,隨著參數(shù)量越來越多、模型越來越大,“過擬合”的問題會(huì)越來越輕。
謝晨提到,Waymo之前僅感知就有200多個(gè)模型,但接下來可能會(huì)用1個(gè)大模型統(tǒng)領(lǐng)所有這些模型,等大模型出來了,“過擬合”的問題就會(huì)大幅度減少。
鑒于真實(shí)數(shù)據(jù)不僅量不夠,且使用難度大,對(duì)Waymo來說,要訓(xùn)練大模型,就必須依賴合成數(shù)據(jù)。據(jù)悉,Waymo最近計(jì)劃將合成數(shù)據(jù)的使用率提升1000倍。
八、給真實(shí)數(shù)據(jù)“加杠桿”
前段時(shí)間,在學(xué)習(xí)合成數(shù)據(jù)的過程中,筆者突然想到一個(gè)問題:莫非,Waymo和Cruise這些美國的無人駕駛公司,堅(jiān)持“一條道走到黑”、死磕L4的最大底氣是,他們在賭合成數(shù)據(jù)?一旦合成數(shù)據(jù)對(duì)提升算法效果的價(jià)值能跟真實(shí)數(shù)據(jù)相媲美,他們就不用再擔(dān)心“數(shù)據(jù)不夠用”了?
起初,這只是筆者單方面的猜測,但隨后,筆者也帶著這一猜測跟曾擔(dān)任過Cruise仿真主管的謝晨做過一些交流,謝晨是認(rèn)可筆者這一猜測的。
當(dāng)然了,對(duì)真實(shí)道路數(shù)據(jù)不足的L4公司來說,用合成數(shù)據(jù)去補(bǔ)充、代替或“顛覆”真實(shí)數(shù)據(jù),或多或少總會(huì)有一些無奈的成分在里面。那么,像光輪智能這樣的第三方合成數(shù)據(jù)服務(wù)商,是如何給合成數(shù)據(jù)定位的呢?
謝晨稱:
他們并不打算用合成數(shù)據(jù)取代真實(shí)數(shù)據(jù)(承認(rèn)合成數(shù)據(jù)也無法代表現(xiàn)實(shí)世界的多樣性),而是用合成數(shù)據(jù)及相關(guān)技術(shù)來提升真實(shí)數(shù)據(jù)的使用效率。
在主機(jī)廠或自動(dòng)駕駛公司把真實(shí)數(shù)據(jù)提供給他們后,他們可以拿這些數(shù)據(jù)去基于NeRF技術(shù)做3D重建或泛化,并且加上Sim2Real(用Diffusion Model來提升數(shù)據(jù)保真度),這就把真實(shí)數(shù)據(jù)轉(zhuǎn)換成了合成數(shù)據(jù);然后,再在仿真系統(tǒng)里將這些合成數(shù)據(jù)跟真實(shí)數(shù)據(jù)“混搭”,通過這種“混搭”,以真實(shí)數(shù)據(jù)為主的數(shù)據(jù)集也間接地具備了“泛化能力”。
事實(shí)上,重建后產(chǎn)生新的數(shù)據(jù),并且真實(shí)數(shù)據(jù)“混搭”,也是真實(shí)數(shù)據(jù)實(shí)現(xiàn)“泛化”的最有效方式。
通過這種“混搭”或泛化,真實(shí)數(shù)據(jù)的使用效率將大幅度上升。
真實(shí)數(shù)據(jù)跟合成數(shù)據(jù)“混搭”的比例,英偉達(dá)等多家公司實(shí)踐的結(jié)果是,7:3(即合成數(shù)據(jù)占30%)的效果比較理想。
7:3這個(gè)比例,相當(dāng)于在真實(shí)數(shù)據(jù)的基礎(chǔ)上再增加了超過40%的數(shù)據(jù)量,但由于新增的那40%都是合成數(shù)據(jù),有很強(qiáng)的泛化能力、可以做N多次排列組合,那么,最終用于算法訓(xùn)練的corner case的數(shù)量就不是增加了40%,而是增加了幾十倍、甚至是幾百倍!
由此可見,合成數(shù)據(jù)非但不是真實(shí)數(shù)據(jù)的“競爭對(duì)手”“顛覆者”,反而還可以給真實(shí)數(shù)據(jù)“加杠桿”“賦能”。
如果能利用好合成數(shù)據(jù)這個(gè)“杠桿”,其他主機(jī)廠或自動(dòng)駕駛公司也有條件擁有“特斯拉量級(jí)”的corner case數(shù)據(jù)。
在聊到這里時(shí),筆者又臨時(shí)想到了一個(gè)問題:這樣看來,合成數(shù)據(jù)公司跟傳統(tǒng)做LogSim和WorldSim的仿真公司并不是競爭對(duì)手,而可能是合作伙伴?
謝晨說:
沒錯(cuò)。我們其實(shí)已經(jīng)跟一些做工具鏈的公司談合作了,他們手上有一些真實(shí)數(shù)據(jù),但這些數(shù)據(jù)的3D重建、泛化等工作,會(huì)交給光輪智能來做。
九、有望“搞定”感知的仿真
當(dāng)前,自動(dòng)駕駛行業(yè)做的仿真,基本上僅限于規(guī)控的仿真,因?yàn)椋兄姆抡鎸?shí)在太難做了。但過去的兩個(gè)多月里,筆者在學(xué)習(xí)合成數(shù)據(jù)時(shí)發(fā)現(xiàn),幾乎所有做自動(dòng)駕駛合成數(shù)據(jù)的公司,都會(huì)拿仿真感知的仿真來舉例。
看起來,隨著合成數(shù)據(jù)的日漸成熟,困擾自動(dòng)駕駛行業(yè)很久的感知難題終于有望取得突破了。由于規(guī)控的仿真已相對(duì)成熟,那一旦感知仿真突破,端到端的仿真就沒多大障礙了。
這個(gè)主題比較復(fù)雜,一兩段話也說不清楚,我們將在本系列的第四篇文章中做更詳細(xì)的分析。敬請期待。
十、使仿真可以真正服務(wù)于研發(fā)
在過去的一兩年里,特斯拉、Waymo、Cruise與英偉達(dá)這些公司的仿真部門,服務(wù)的對(duì)象首先是公司的研發(fā)部門,然后才是測試部門;而國內(nèi)大部分公司的仿真,服務(wù)的對(duì)象僅限于自己或客戶公司的測試部門。
這種區(qū)別背后的原因在于,在特斯拉、Waymo、Cruise、英偉達(dá)這些公司的仿真,既可以用來做算法的測試驗(yàn)證,也可以用來做算法訓(xùn)練;而國內(nèi)大部分公司的仿真,只能用來做測試驗(yàn)證。
又是什么導(dǎo)致了這種不同呢?對(duì)合成數(shù)據(jù)的擁抱程度、所使用的合成數(shù)據(jù)的可用性。
我們在上文已經(jīng)提到過,真實(shí)數(shù)據(jù)無法泛化、缺乏交互能力,所以,基于真實(shí)數(shù)據(jù)的仿真,只能用于對(duì)算法的邏輯做測試驗(yàn)證,而不能用于算法訓(xùn)練。
那么,基于合成數(shù)據(jù)的仿真,能用來做算法訓(xùn)練嗎?這個(gè)也得看合成數(shù)據(jù)的質(zhì)量了——只有同時(shí)滿足“泛化能力足夠強(qiáng)”和“保真度足夠高”這兩個(gè)標(biāo)準(zhǔn)的才可以。
基于WorldSim的合成數(shù)據(jù),保真度無法保證,泛化能力也一般;基于當(dāng)下大熱的NeRF技術(shù)生成的合成數(shù)據(jù),保真度是沒什么問題了,但泛化能力也僅局限于“調(diào)整視角/傳感器的安裝位置”......因此,這些盡管也會(huì)被用于算法訓(xùn)練,但效果并不是很理想。
不過,隨著AI大模型日漸成熟,并且,大模型在合成數(shù)據(jù)生成過程中的參與度越來越高,合成數(shù)據(jù)逐漸具備了同時(shí)兼顧保真度和泛化能力的可能性。比如,由Diffusion Model和World Model生成的合成數(shù)據(jù)。這樣的合成數(shù)據(jù),就可以用來做算法訓(xùn)練了。
如果能進(jìn)一步將AI大模型跟NeRF結(jié)合起來,那合成數(shù)據(jù)在算法訓(xùn)練方面可發(fā)揮的空間就更大了。這一路線或可幫助那些真實(shí)數(shù)據(jù)不多、但合成數(shù)據(jù)技術(shù)足夠強(qiáng)、并且擁抱合成數(shù)據(jù)也足夠積極的公司取得一定的競爭優(yōu)勢,至少是減少他們的劣勢。
合成數(shù)據(jù),或許正是一直被外界質(zhì)疑為“數(shù)據(jù)不夠”的Waymo、Cruise和Zoox這些美國公司敢于“一條道走到黑”、死磕L4的底氣所在吧。事實(shí)上,這幾家公司一直將合成數(shù)據(jù)作為其技術(shù)棧的核心組成部分之一。
國內(nèi)的主機(jī)廠中,蔚來通過積極擁抱合成數(shù)據(jù),已開始用仿真來支持研發(fā)。接下來,隨著合成數(shù)據(jù)的價(jià)值贏得越來越多的認(rèn)可,應(yīng)該會(huì)有更多主機(jī)廠擁抱這一趨勢吧。
而對(duì)第三方仿真公司來說,只有在服務(wù)對(duì)象從客戶公司的測試部門拓展至研發(fā)部門,能對(duì)算法訓(xùn)練做出自己的貢獻(xiàn)時(shí),他們才算是最大程度地實(shí)現(xiàn)了自己的“人生價(jià)值”。
結(jié)語:
我們在前面已多次提到多,數(shù)據(jù)閉環(huán)能力,是自動(dòng)駕駛下半場的“入場券”。重要的話不嫌多,在這里可以再重復(fù)一遍。
合成數(shù)據(jù)是數(shù)據(jù)閉環(huán)體系的重要組成部分,并且,合成數(shù)據(jù)不僅具備很多真實(shí)數(shù)據(jù)不具備的優(yōu)勢,而且還可以給真實(shí)數(shù)據(jù)“加杠桿”,因此,我們也可以認(rèn)為,那些率先擁抱合成數(shù)據(jù)的公司,等于率先拿到了自動(dòng)駕駛的“入場券”。
而那些合成數(shù)據(jù)服務(wù)商,則相當(dāng)于是在生產(chǎn)和銷售自動(dòng)駕駛下半場的“入場券”。
提供這一入場券的公司,在國外,除英偉達(dá)這樣的巨頭外,還有Applied Intution、Parallel Domain、Cognata、Datagen等初創(chuàng)公司。
其中,Applied Inntution成立于2017年,但該公司早在2020年就已經(jīng)盈利;在2021年底,該公司的估值達(dá)到了36億美元;2023年5月,該公司以7000萬美元現(xiàn)金收購了無人駕駛卡車公司Embark。
該公司的業(yè)務(wù)僅聚焦于自動(dòng)駕駛這個(gè)單一賽道,能在成立三年內(nèi)就盈利,并在此后估值飆漲,甚至還能拿出足夠的現(xiàn)金來收購其他公司,也足見美國自動(dòng)駕駛駕駛公司及資本市場對(duì)擁抱合成數(shù)據(jù)的積極程度。
在國內(nèi),百度、華為云及51World等公司近些年一直在探索合成數(shù)據(jù),而在近一兩年新成立的公司中,光輪智能是一個(gè)典型代表。
創(chuàng)辦光輪智能之前,謝晨曾先后擔(dān)任Crusie仿真主管、英偉達(dá)自動(dòng)駕駛仿真主管、蔚來自動(dòng)駕駛仿真主管,在各家公司都經(jīng)歷了基于合成數(shù)據(jù)的仿真從0到1的過程。目前,光輪智能核心技術(shù)團(tuán)隊(duì)的幾名骨干成員也有類似的經(jīng)歷。
雖然成立比較晚,但成立晚有一個(gè)優(yōu)勢就是,光輪智能充分吸收了其他公司在自動(dòng)駕駛仿真方面的一些經(jīng)驗(yàn)教訓(xùn),因而,從一開始就避開了很多坑。謝晨認(rèn)為,仿真要做好,必須“虛實(shí)結(jié)合”,并且,比較要要將仿真跟AI深度結(jié)合。
關(guān)于仿真跟AI的結(jié)合,謝晨說:
目前,大多數(shù)公司的做法是用AI來輔助仿真,而我們的思路在則是用仿真來輔助AI。
那么,究竟什么是“虛實(shí)結(jié)合”,什么是“用AI輔助仿真”,什么又是“用仿真輔助AI”呢?這些內(nèi)容,我們將在本系列的第二篇文章中做更詳細(xì)的展開。敬請期待。
-
數(shù)據(jù)
+關(guān)注
關(guān)注
8文章
7241瀏覽量
91028 -
AI
+關(guān)注
關(guān)注
87文章
34274瀏覽量
275448 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
788文章
14204瀏覽量
169586
原文標(biāo)題:自動(dòng)駕駛合成數(shù)據(jù)科普一:不做真實(shí)數(shù)據(jù)的“顛覆者”,做“杠桿”
文章出處:【微信號(hào):阿寶1990,微信公眾號(hào):阿寶1990】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評(píng)論請先 登錄
新能源車軟件單元測試深度解析:自動(dòng)駕駛系統(tǒng)視角
技術(shù)分享 | 高逼真合成數(shù)據(jù)助力智駕“看得更準(zhǔn)、學(xué)得更快”


助力從真實(shí)駕駛到虛擬測試# 仿真# 測試# 場景# 合成數(shù)據(jù)# 汽車# 數(shù)據(jù)# 自動(dòng)駕駛# 人工智能# 科技
技術(shù)分享 |多模態(tài)自動(dòng)駕駛混合渲染HRMAD:將NeRF和3DGS進(jìn)行感知驗(yàn)證和端到端AD測試

技術(shù)分享 | AVM合成數(shù)據(jù)仿真驗(yàn)證方案


自動(dòng)駕駛開發(fā)需要海量數(shù)據(jù),但真實(shí)數(shù)據(jù)難以覆蓋所有復(fù)雜場景,如何解決?# 自動(dòng)駕駛# 仿真# #汽車電子
RTX 5880 Ada 驅(qū)動(dòng)51Sim實(shí)現(xiàn)端到端仿真與數(shù)據(jù)合成新飛躍

英偉達(dá)推出基石世界模型Cosmos,解決智駕與機(jī)器人具身智能訓(xùn)練數(shù)據(jù)問題

從《自動(dòng)駕駛地圖數(shù)據(jù)規(guī)范》聊高精地圖在自動(dòng)駕駛中的重要性

一文聊聊自動(dòng)駕駛測試技術(shù)的挑戰(zhàn)與創(chuàng)新

標(biāo)貝科技:自動(dòng)駕駛中的數(shù)據(jù)標(biāo)注類別分享

標(biāo)貝科技:自動(dòng)駕駛中的數(shù)據(jù)標(biāo)注類別分享

車廠如何安全有效做自動(dòng)駕駛路測?






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論