") 基于無人機(jī)平臺的外場天線測量Ka波段天線方向圖測試
基于無人機(jī)平臺的外場天線測量Ka波段天線方向圖測試
1回顧
前兩年(2021-2022),北京中測國宇科技有限公司為響應(yīng)5G基站天線的外場測量需求,提出了外場無人機(jī)基站巡檢系統(tǒng),并且在S波段上驗(yàn)證了測量系統(tǒng)的測試重復(fù)性。詳見
5G基站外場無人機(jī)測試方案-外場無人機(jī)基站巡檢系統(tǒng)
近期,公司技術(shù)團(tuán)隊(duì)為拓展本系統(tǒng)在毫米波波段的測試能力,以Ka波段標(biāo)準(zhǔn)增益喇叭天線為待測天線(AUT),在外場部署測試環(huán)境開展了外場試驗(yàn)。
本文以待測天線方向圖的外場測量為例,向大家匯報(bào)我們做的一些工作!
2實(shí)驗(yàn)環(huán)境
外場實(shí)驗(yàn)在北京平谷區(qū)金海湖機(jī)場完成,現(xiàn)場照片如下圖2-1。


圖2-1外場實(shí)驗(yàn)現(xiàn)場照片
AUT被固定于吊籃邊緣,吊籃內(nèi)有一臺R&SSMW200A矢量信號發(fā)生器和一只功率放大器,R&SSMW200A用于生成5GNR測試信號,5GNR測試信號被功率放大器放大后經(jīng)AUT發(fā)出。吊籃高度升高至距離地面25米。
R&SFPH手持式頻譜儀作為機(jī)載測量儀表,通過USB數(shù)據(jù)線與機(jī)載PC通信,機(jī)載PC是一種輕質(zhì)工控機(jī),用于抓取手持式頻譜儀的掃頻數(shù)據(jù)。
全站儀是一種測繪設(shè)備,配合RTK定位工具,可解算出AUT的GPS坐標(biāo)。
測量探頭是一種輕質(zhì)、雙極化、超寬帶四脊喇叭天線,剛性掛載于云臺正下方,其工作頻帶為22-44GHz。為降低測量探頭與無人機(jī)機(jī)身的耦合,將測量探頭與云臺安裝在延長支架上,使其向飛機(jī)機(jī)頭外側(cè)方向探出。
3測量鏈路
發(fā)射端:SMW200A → 電纜→ PA → 電纜→ Ka波段標(biāo)準(zhǔn)增益喇叭天線。
接收端:毫米波探頭 → 電纜→ R&SFPH手持式頻譜儀。
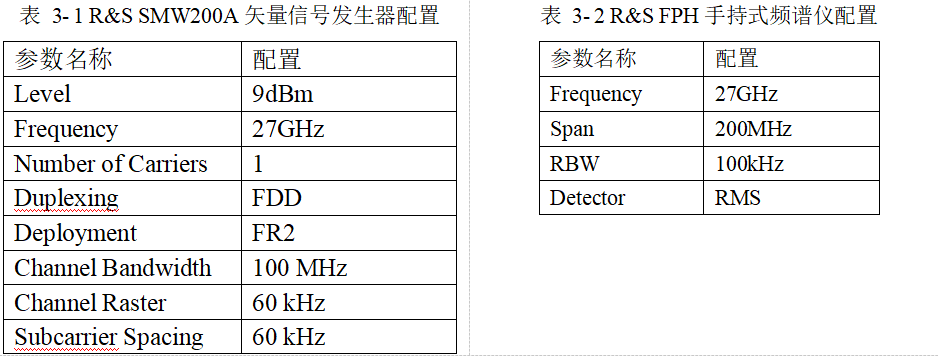
R&S SMW200A矢量信號發(fā)生器、R&SFPH手持式頻譜儀配置如下表3-1、表3-2所示。
4航線規(guī)劃
在地面站軟件中按照如下表4-1所示航線參數(shù)進(jìn)行航線規(guī)劃,航線規(guī)劃效果如下圖4-1所示。
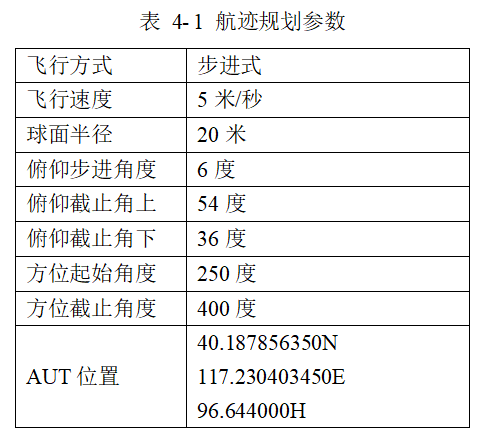
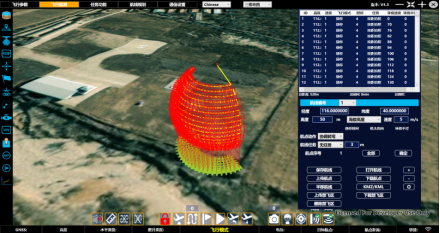
圖4-1航線規(guī)劃效果
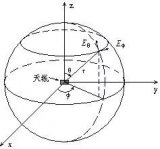
涉及的坐標(biāo)系如下圖4-2所示。其中,Phi或Azimuth表示方位角,正北方向?yàn)?°,正東方向?yàn)?0°;Theta或Elevation表示俯仰角,范圍是0~180°。
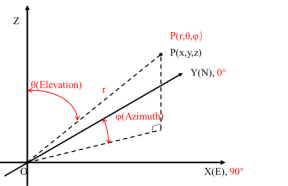
圖4-2坐標(biāo)系
5實(shí)驗(yàn)結(jié)果
27GHz,AUT的E面接收功率方向圖(3D)如下圖5-1所示。
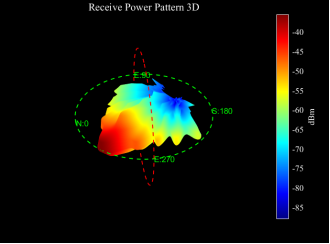
圖5-1接收功率方向圖(3D)
從圖5-1中抽取Theta=90°方向圖,并與仿真結(jié)果對比,如下圖5-2所示。可知,實(shí)測結(jié)果與仿真結(jié)果在主瓣±10°范圍內(nèi)比較吻合,在副瓣方向上存在約2dB電平差異。
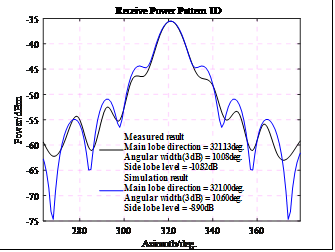
圖5-2Theta=90°方向圖
6總結(jié)
本文以Ka波段標(biāo)準(zhǔn)增益喇叭天線方向圖的外場測量為例,介紹外場試驗(yàn)中涉及的測試環(huán)境搭建、實(shí)驗(yàn)設(shè)備及其配置、測量鏈路、航線規(guī)劃等內(nèi)容,最后展示Ka波段標(biāo)準(zhǔn)增益喇叭天線的3D方向圖測量結(jié)果,對比Theta=90°方向圖的實(shí)測與仿真數(shù)據(jù),發(fā)現(xiàn)在主瓣±10°范圍內(nèi)二者比較吻合,而在副瓣方向上存在約2dB電平差異。
-
天線
+關(guān)注
關(guān)注
70文章
3267瀏覽量
141991 -
無人機(jī)
+關(guān)注
關(guān)注
230文章
10742瀏覽量
185604 -
毫米波
+關(guān)注
關(guān)注
21文章
1968瀏覽量
65720
原文標(biāo)題:基于無人機(jī)平臺的外場天線測量Ka波段天線方向圖測試
文章出處:【微信號:無線通信標(biāo)準(zhǔn)解讀,微信公眾號:無線通信標(biāo)準(zhǔn)解讀】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
無人機(jī)偵測和反制系統(tǒng)
雷達(dá)天線方向圖自動測試系統(tǒng)的軟硬件原理介紹
機(jī)載天線方向圖位置優(yōu)化配置設(shè)計(jì)
如何利用芬蘭的標(biāo)簽性能測試儀來測試超高頻RFID讀寫器天線的方向圖和增益?
【瘋殼·無人機(jī)教程1】開源編隊(duì)無人機(jī)-開機(jī)測試
基于克隆選擇算法的唯相位天線方向圖綜合算法
基于MSP430單片機(jī)的天線方向圖自動測試系統(tǒng)
HFSS結(jié)合UTD計(jì)算,分析機(jī)載對相控陣天線方向圖的影響
某雷達(dá)天線方向圖自動測試系統(tǒng)的軟硬件原理詳解
天線方向圖的特征參數(shù)與天線的方向圖作圖
基于自適應(yīng)陣列算法的天線方向圖校正技術(shù)的詳細(xì)資料說明
如何使用FEKO實(shí)現(xiàn)機(jī)載導(dǎo)航天線方向圖的分析

雷達(dá)天線方向圖的自動化測量系統(tǒng)的介紹和軟硬件結(jié)構(gòu)及原理說明
1分鐘了解天線方向圖核心信息
什么是天線方向圖 衛(wèi)星地球站的天線性能指標(biāo)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論