") 科聰控制系統(tǒng)六大行業(yè)典型應(yīng)用案例合集
科聰控制系統(tǒng)六大行業(yè)典型應(yīng)用案例合集
01. 紡織行業(yè)
科聰移動機(jī)器人通用控制系統(tǒng)賦能無人接絲AGV實現(xiàn)絲盤自動化上下料
應(yīng)用難點:無人接絲AGV是紡織行業(yè)無人工廠重要環(huán)節(jié)之一,這個環(huán)節(jié)對機(jī)器人到點精度要求非常高,無人接絲AGV的到位精度,必須確保“絲級”的準(zhǔn)確無誤,才可以實現(xiàn)高精度的對準(zhǔn),從而不會刮傷絲軸,確保絲的品質(zhì)。
科聰賦能:科聰為客戶提供采用激光、視覺的融合導(dǎo)航技術(shù),接絲過程精準(zhǔn),絲毫不差。

02. 鋰電行業(yè)
科聰AMR移動機(jī)器人控制系統(tǒng)賦能輥筒式AMR實現(xiàn)線邊物流自動化
應(yīng)用難點:鋰電行業(yè)制造工廠的工藝特點之一,是現(xiàn)場環(huán)境時有變動和調(diào)整,普通的激光自然導(dǎo)航技術(shù),不能達(dá)到鋰電制造行業(yè)連續(xù)生產(chǎn)高可靠性要求。科聰賦能:科聰為客戶提供高魯棒性的激光導(dǎo)航算法技術(shù),可在現(xiàn)場環(huán)境變化情況下可靠運(yùn)行,保證移動機(jī)器人在激光自然導(dǎo)航時的準(zhǔn)確定位和穩(wěn)定導(dǎo)航。科聰賦能客戶的輥筒式AMR產(chǎn)品,實現(xiàn)廠內(nèi)可靠、連續(xù)、穩(wěn)定的線邊物流,達(dá)到鋰電無人工廠要求。
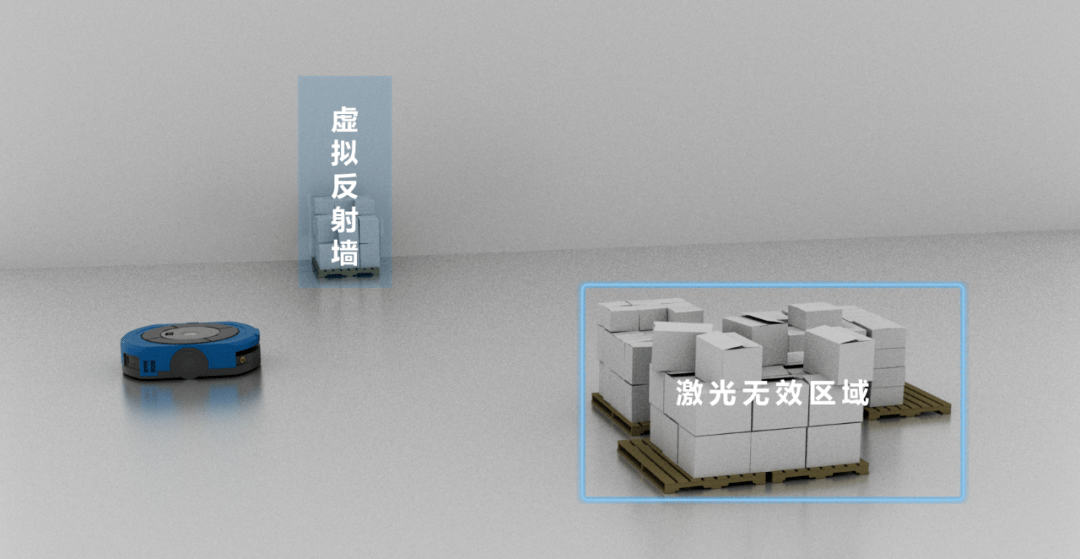
▲基于激光導(dǎo)航算法技術(shù)—— “激光無效區(qū)域”、“反射墻”工具
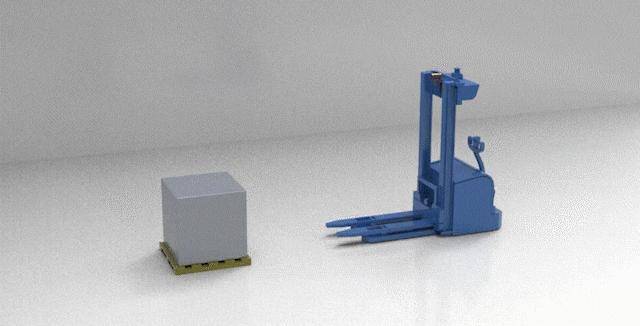
03. 重工行業(yè)
科聰通用移動機(jī)器人控制系統(tǒng)賦能重載AGV&叉式AGV 進(jìn)行鋁卷搬運(yùn)工作
應(yīng)用難點:難點1:鋁卷上料的過程,操作人員無法人為保障每次放置都準(zhǔn)確無誤,傳統(tǒng)叉式AGV對接,無法自動識別棧板出現(xiàn)位置出現(xiàn)偏移;
難點2:鋁卷運(yùn)輸距離非常長,路口復(fù)雜,需要在室內(nèi)和室外工作。

▲室外應(yīng)用 —— 重載AGV
科聰賦能:科聰為客戶提供動態(tài)目標(biāo)的自適應(yīng)精定位算法,算法基于激光和視覺融合,可以全自動智能的檢測傾斜角度,傳統(tǒng)叉式AGV智能升級,機(jī)器人取貨、放貨準(zhǔn)確無誤。
科聰為客戶提供激光+GNSS的混合導(dǎo)航技術(shù),重載AGV可不受地面平整度和定位標(biāo)志的限制,重載AGV空曠區(qū)域的長距離高效運(yùn)輸?shù)玫綕M足,“室內(nèi)-室外-室內(nèi)”自主導(dǎo)航無縫銜接。
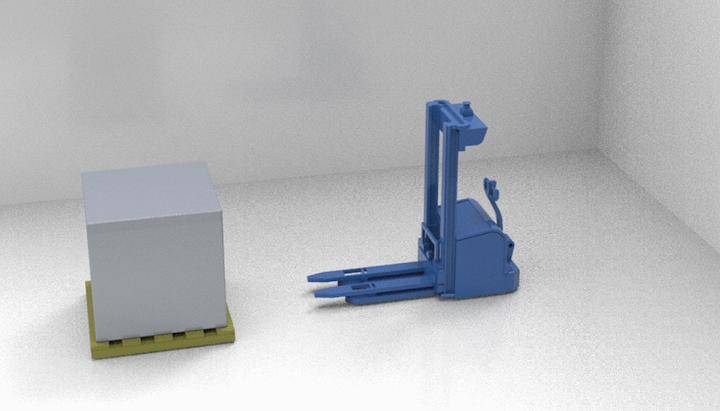
▲棧板識別技術(shù)
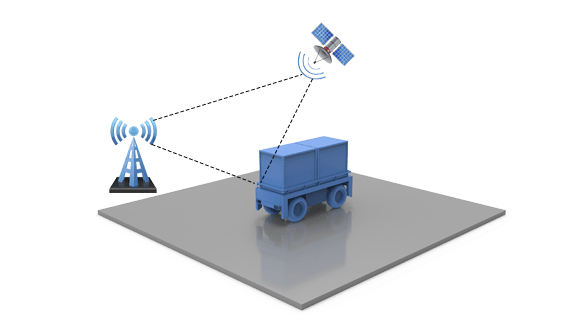
▲GNSS導(dǎo)航
04.能源行業(yè)
科聰叉式移動機(jī)器人控制系統(tǒng)賦能叉式AGV實現(xiàn)綜合性倉儲物流智能無人化
應(yīng)用難點:綜合性倉儲,物流智能化和無人化要求高,客戶之前使用的進(jìn)口導(dǎo)航控制系統(tǒng),無法實現(xiàn)本項目的重型機(jī)械臂對接 + 牽引車對接 + 開放式貨車對接 + 多類型物資叉取+ 室內(nèi)/半室外/室外應(yīng)用要求。
▲作業(yè)現(xiàn)場
科聰賦能:科聰為客戶提供基于視覺技術(shù)的自動識別檢測算法,配合可變門架控制等,實現(xiàn)了機(jī)械臂工位對接 + 牽引車對接 + 開放式貨車對接 + 多類型物資叉取的無人工廠要求。
科聰為客戶提供的叉式移動機(jī)器人控制系統(tǒng),可以全自動的進(jìn)行包括了8大類物資,多種標(biāo)準(zhǔn)/非標(biāo)托盤的全自動貨物自動取放。
▲自動識別檢測技術(shù)

▲全景識別技術(shù)
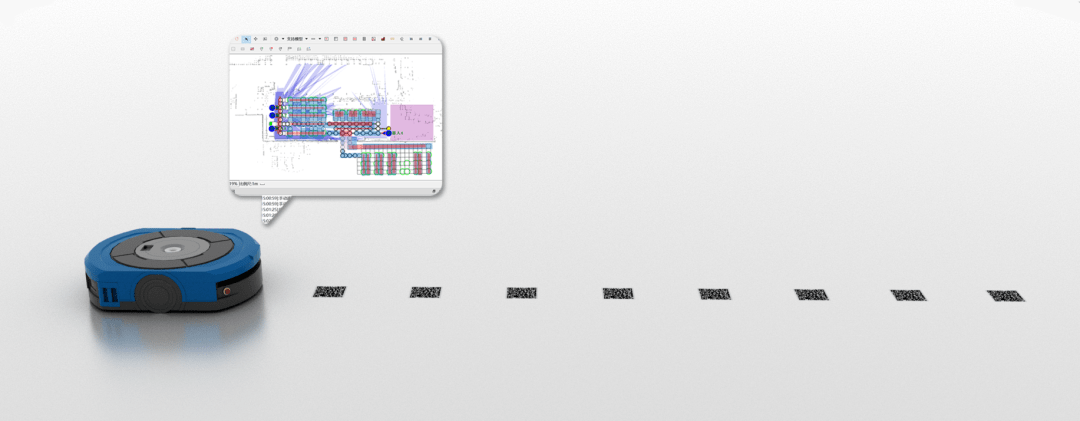
05. 交通運(yùn)輸行業(yè)
科聰AMR移動機(jī)器人控制系統(tǒng)賦能潛入頂升式AMR完成零件搬運(yùn)工作
應(yīng)用難點:因為客觀原因,從進(jìn)場到投運(yùn)的工期時間非常短,而工廠面積非常大,傳統(tǒng)的二維碼技術(shù),無法滿足對部署上線時效性的要求。
科聰賦能:科聰為客戶提供全自動智能識別算法技術(shù),通過控制系統(tǒng)的自學(xué)習(xí)功能,大幅度降低二維碼部署的調(diào)試時間,與傳統(tǒng)的二維碼技術(shù)部署相比,整體調(diào)試時間縮短65%,部署工程師人員減少50%。
06. 鑄造行業(yè)
科聰通用移動機(jī)器人控制系統(tǒng)賦能六舵輪搬運(yùn)AGV實現(xiàn)工廠的無人搬運(yùn)工作
應(yīng)用難點:此項目現(xiàn)場鑄鐵成品、半成品非常重,需要采用六舵輪底盤結(jié)構(gòu)承重;鑄鐵成品、半成品非常大,底盤的尺寸也非常大;車間經(jīng)常有油漬在地面,會導(dǎo)致輪子打滑。

▲應(yīng)用車型
科聰賦能:科聰為客戶提供標(biāo)準(zhǔn)的多舵輪運(yùn)動控制功能塊,功能塊內(nèi)置算法,可以在“有起伏、有高低差、有污漬、有伸縮縫等”的各類工廠地面,在工廠、倉庫的狹窄通道里,安全自動的完成如:入庫、出庫、轉(zhuǎn)彎、轉(zhuǎn)向等。內(nèi)置的算法還考慮到貨物擺放不均勻的顛簸、晃動等,達(dá)到應(yīng)用的準(zhǔn)確度、流暢度要求。
-
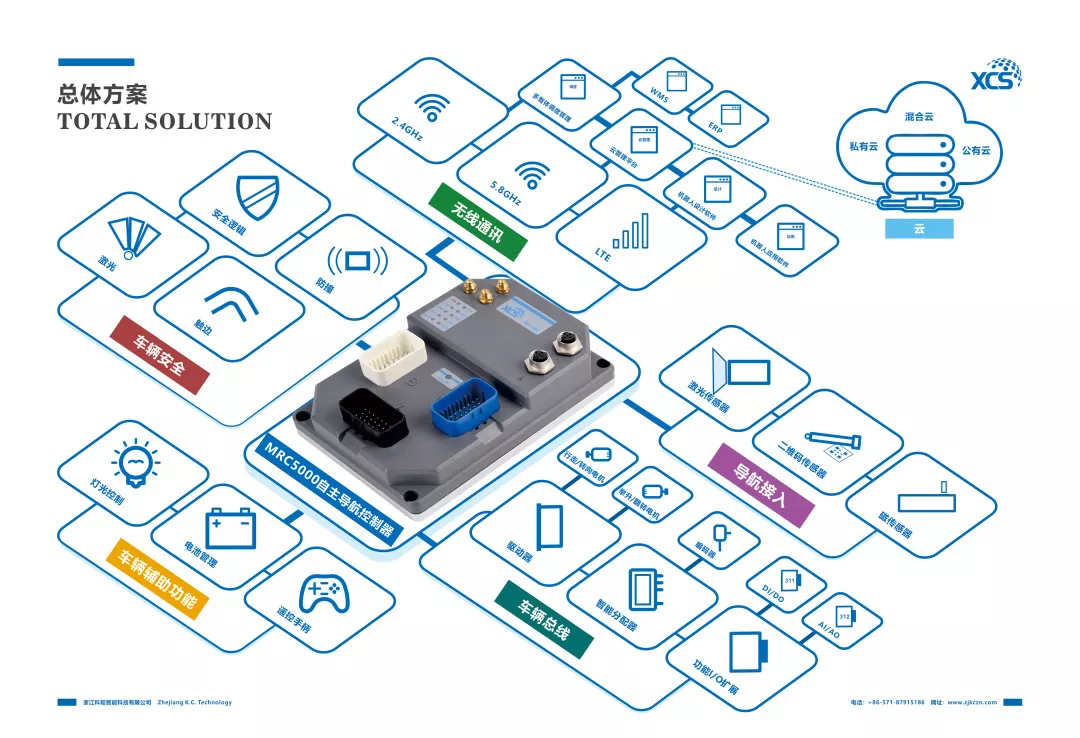
控制器
+關(guān)注
關(guān)注
114文章
16963瀏覽量
182895 -
控制系統(tǒng)
+關(guān)注
關(guān)注
41文章
6753瀏覽量
111801 -
AMR
+關(guān)注
關(guān)注
3文章
455瀏覽量
30826 -
AGV
+關(guān)注
關(guān)注
27文章
1431瀏覽量
41999
發(fā)布評論請先 登錄
京準(zhǔn)電鐘:GPS北斗時間同步系統(tǒng)在五大行業(yè)揭秘

DCS控制系統(tǒng)的配置與實施流程
基于PWM的溫度控制系統(tǒng)設(shè)計
步進(jìn)電機(jī)伺服控制系統(tǒng)的作用
控制系統(tǒng)整定的方法和步驟
為什么要對控制系統(tǒng)進(jìn)行整定
AGV是什么? ——科聰智能自主導(dǎo)航控制系統(tǒng)





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論