") 英創(chuàng)匯智自研的底盤域控制器為高級(jí)駕駛輔助賦能
英創(chuàng)匯智自研的底盤域控制器為高級(jí)駕駛輔助賦能

前言
在汽車產(chǎn)業(yè)發(fā)生重大變革的時(shí)代,電動(dòng)化、網(wǎng)聯(lián)化以及智能化成為了研究發(fā)展的重要領(lǐng)域,高度智能化的新型汽車需要具備更智能、更安全、更可靠的底盤執(zhí)行機(jī)構(gòu)。線控制動(dòng)技術(shù)是智能化底盤的核心技術(shù)之一,為了適應(yīng)智能化汽車的多場(chǎng)景應(yīng)用,線控制動(dòng)系統(tǒng)不僅需要實(shí)現(xiàn)常規(guī)的制動(dòng)助力功能來(lái)滿足人工制動(dòng),還需要具備主動(dòng)制動(dòng)、動(dòng)力學(xué)狀態(tài)信息預(yù)測(cè)等智能化的技術(shù)。英創(chuàng)匯智經(jīng)過(guò)多年的技術(shù)打磨和積累,在線控制動(dòng)產(chǎn)品系列中不斷進(jìn)行創(chuàng)新和集成,研發(fā)出適應(yīng)未來(lái)智能汽車的智能線控制動(dòng)系統(tǒng)解決方案(T-IBWS),目前該解決方案已經(jīng)與ESC-Pro產(chǎn)品完美契合,在ESC原有動(dòng)力學(xué)控制功能(ABS、TCS、AYC等)的基礎(chǔ)上,集成ADAS支持功能,為AEB、ACC、APA等功能提供安全舒適的控制執(zhí)行接口,同時(shí)支持實(shí)時(shí)胎壓監(jiān)測(cè)以及基于視覺(jué)的路面附著系數(shù)預(yù)測(cè),全方位保證智能汽車行駛安全。
一、電動(dòng)智能化汽車快速發(fā)展
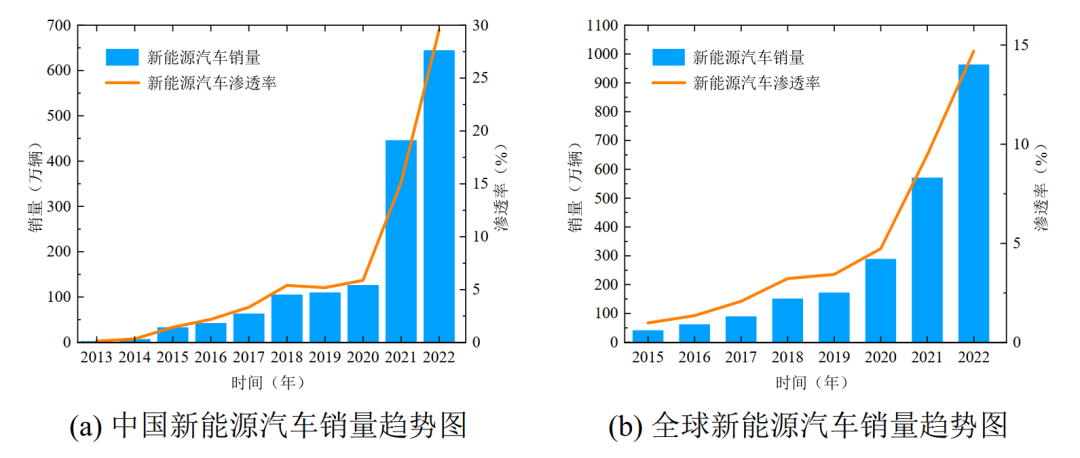
新能源汽車作為智能網(wǎng)聯(lián)汽車的重要載體,近些年在我國(guó)政府補(bǔ)貼政策的支持下發(fā)展迅速,同時(shí)為了實(shí)現(xiàn)能源消耗結(jié)構(gòu)的轉(zhuǎn)型,大力發(fā)展新能源汽車也是必經(jīng)之路,近年來(lái)國(guó)內(nèi)外新能源汽車的銷量和滲透率逐年增加。
同時(shí),人工智能的快速發(fā)展和汽車電動(dòng)化的日益普及促使了研發(fā)人員對(duì)汽車智能化進(jìn)行不斷探索,根據(jù)國(guó)際汽車工程師協(xié)會(huì)發(fā)布的自動(dòng)駕駛等級(jí)分級(jí)標(biāo)準(zhǔn),自動(dòng)駕駛汽車按照智能化程度可分為五個(gè)級(jí)別,自動(dòng)駕駛等級(jí)越高,對(duì)車輛控制精度以及可靠性要求就越高,而制動(dòng)系統(tǒng)是車輛控制的核心部件,為了應(yīng)對(duì)高級(jí)別自動(dòng)駕駛的需求,線控制動(dòng)系統(tǒng)必須具有較高的控制精度、較快的響應(yīng)速度以及較舒適的主觀體驗(yàn)。當(dāng)前,L2 級(jí)高級(jí)輔助駕駛系統(tǒng)逐漸成為了車輛的標(biāo)配, AEB、ACC、APA等功能均需要底盤制動(dòng)系統(tǒng)的主動(dòng)制動(dòng)控制,即在無(wú)駕駛員介入時(shí)可自動(dòng)實(shí)現(xiàn)車輛減速。此外,隨著自動(dòng)駕駛級(jí)別的提高,車輛監(jiān)測(cè)自身運(yùn)行狀態(tài)的能力也需要隨之提升,車輛需要替代駕駛員對(duì)車輛自身狀態(tài)信息進(jìn)行實(shí)時(shí)觀測(cè)甚至預(yù)測(cè),才能提前規(guī)避風(fēng)險(xiǎn)工況,保證上層規(guī)劃和底層控制都能夠讓車輛一直處于動(dòng)力學(xué)穩(wěn)定性區(qū)間內(nèi)。
二、智能線控制動(dòng)系統(tǒng)解決方案
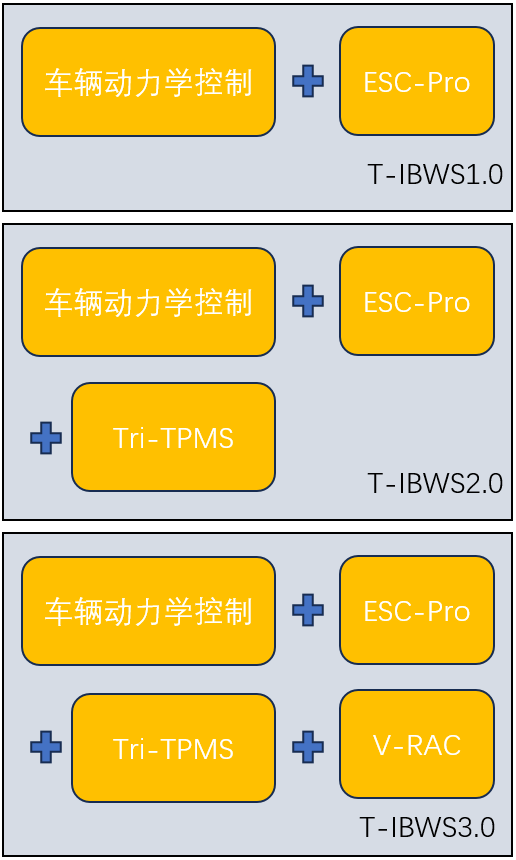
經(jīng)過(guò)不斷的技術(shù)迭代,T-IBWS目前已經(jīng)推出三代產(chǎn)品。
T-IBWS 1.0是為了支持ADAS功能而開(kāi)發(fā)的第一代智能線控制動(dòng)系統(tǒng)解決方案,該方案當(dāng)前選用ESC-Pro作為線控制動(dòng)執(zhí)行器,同時(shí)保留基礎(chǔ)的車輛動(dòng)力學(xué)控制功能,是一種低成本,快量產(chǎn)的解決方案。
T-IBWS 2.0在1.0的基礎(chǔ)上加入智能胎壓監(jiān)測(cè)系統(tǒng)(Tri-TPMS),車輛在高速緊急制動(dòng)時(shí)可以根據(jù)胎壓信息進(jìn)行四輪制動(dòng)力主動(dòng)調(diào)節(jié)或功能降級(jí),避免出現(xiàn)因兩側(cè)車輪胎壓不一致而造成嚴(yán)重的制動(dòng)跑偏現(xiàn)象。
T-IBWS 3.0在2.0的基礎(chǔ)上加入基于視覺(jué)信息的路面附著系數(shù)預(yù)測(cè)(V-RAC),主要集成在底盤域控制器中,未來(lái)智能汽車的電子電器架構(gòu)將分為不同控制域,不同控制區(qū)域之間的信息交互更強(qiáng),傳感器信息維度更廣。底盤域會(huì)利用智能駕駛域的信息進(jìn)行多維度動(dòng)力學(xué)信息觀測(cè),更精確地掌控車輛狀態(tài),而智能駕駛域也會(huì)利用底盤域的車輛動(dòng)力學(xué)信息進(jìn)行規(guī)劃決策,提前預(yù)知車輛危險(xiǎn)狀態(tài)。
T-IBWS
基于T-IBWS 3.0解決方案,下面對(duì)各模塊進(jìn)行單獨(dú)介紹。
三、英創(chuàng)匯智ESC-Pro系統(tǒng)
ESC-Pro為ESC-Base的升級(jí)系列,是專門為ADAS底層控制開(kāi)發(fā)的一款ESC適配產(chǎn)品,能夠滿足ACC、AEB、APA的加速度、速度以及距離的控制需求,相對(duì)于ESC-Base產(chǎn)品,其主要的特點(diǎn)為:
1. 支持ACC、AEB、APA等上層ADAS功能的制動(dòng)控制、扭矩控制以及合理的扭矩制動(dòng)切換。
2.更高的減速度控制精度,減速度穩(wěn)態(tài)控制精度小于0.2m/s2
3. 更快的壓力響應(yīng)時(shí)間,AEB中TT+TTL總和小于600ms。
4. 更小的主動(dòng)增壓噪聲,有效提高行駛舒適性。
5. 具備ESC-Base全部的車輛動(dòng)力學(xué)控制功能。
ESC-Pro外形圖

ESC-Pro功能列表
硬件方案:液壓原理與設(shè)計(jì)
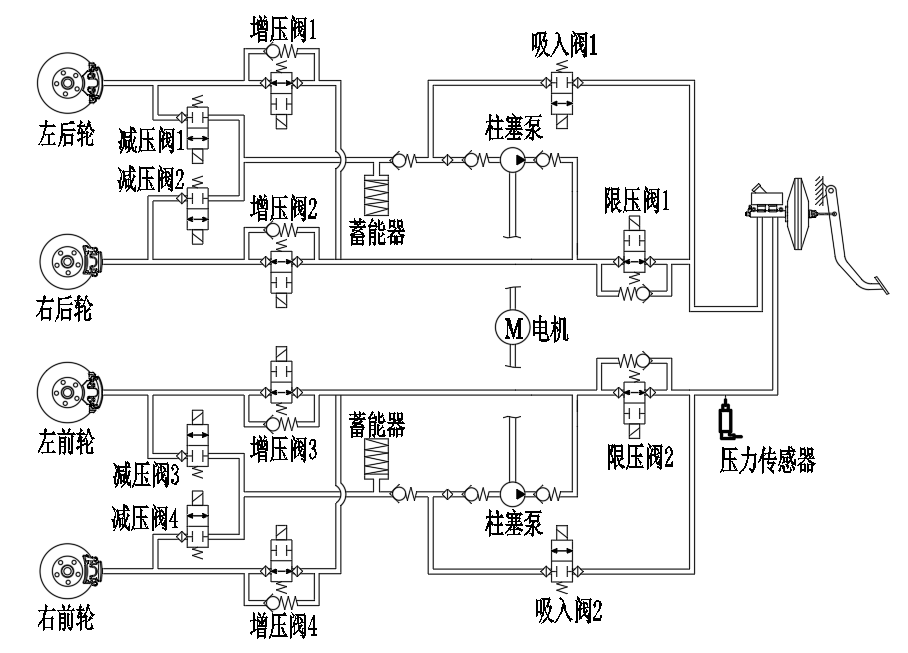
平臺(tái)化設(shè)計(jì):與Base版本相同液壓原理、核心元件共用、相同的外部邊界。
系列化設(shè)計(jì):提供3ml5ml7ml蓄能器設(shè)計(jì),滿足6噸以下車型需求;提供EPBi構(gòu)型。
更快的主動(dòng)建壓速度:550ms for B+ class vehicle。
更精準(zhǔn)的壓力調(diào)控精度:最小0.2MPa壓力調(diào)控精度。
優(yōu)化NVH性能:較Base版本提升4db以上。
更高壽命等級(jí):滿足31萬(wàn)次極限工況耐久。
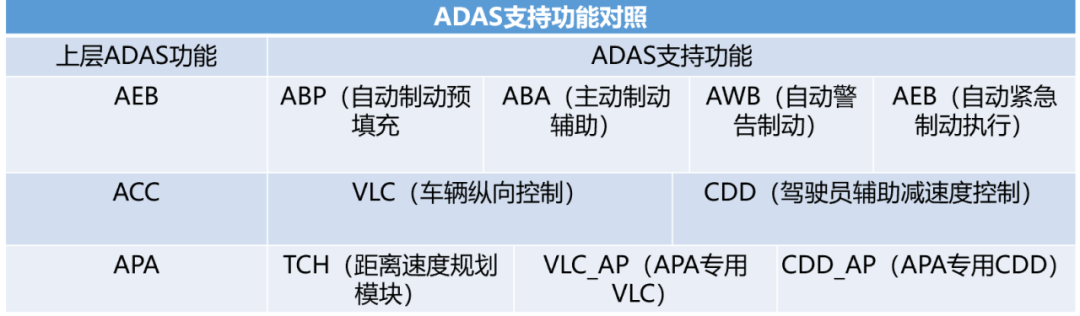
軟件方案:ADAS支持功能適配
根據(jù)上層ADAS功能(AEB、ACC、APA等)的需求,ESC能夠提供執(zhí)行層的支持功能,根據(jù)上層控制指令以及車輛實(shí)際狀態(tài),ESC對(duì)發(fā)動(dòng)機(jī)扭矩和液壓控制單元的壓力進(jìn)行協(xié)調(diào)控制,保證執(zhí)行層對(duì)壓力和扭矩控制的精確性、穩(wěn)定性和安全性。
ESC-Pro系統(tǒng)關(guān)鍵技術(shù)
以APA為例,上層APA功能根據(jù)感知系統(tǒng)的融合信息,尋找到目標(biāo)車位后,通過(guò)路徑規(guī)劃模塊計(jì)算合理的車輛行駛路徑,根據(jù)當(dāng)前車輛位置以及目標(biāo)路徑,設(shè)定橫向運(yùn)動(dòng)和縱向運(yùn)動(dòng)的控制目標(biāo),其中橫向控制由轉(zhuǎn)向系統(tǒng)負(fù)責(zé),縱向控制由制動(dòng)系統(tǒng)負(fù)責(zé)。為了支持APA的車輛縱向控制,ESC-Pro集成了TCH、VLC_AP、CDD_AP以及PSC功能。
由于上層APA直接發(fā)送目標(biāo)距離給到線控制動(dòng)系統(tǒng),TCH需要在最高限定車速的范圍內(nèi)進(jìn)行速度和加速度規(guī)劃,使得規(guī)劃曲線既能滿足目標(biāo)距離的精確控制,也能合理限制加速度范圍,有效提高泊車過(guò)程中的舒適性。這里采用五次多項(xiàng)式路徑規(guī)劃策略,根據(jù)起始點(diǎn)和目標(biāo)點(diǎn)的位置、速度以及加速度等信息,將五次多項(xiàng)式進(jìn)行解算,從而得到目標(biāo)速度和加速度曲線。
VLC全稱為車輛縱向控制(Vehicle Longitudinal Control),而VLC_AP是在VLC的基礎(chǔ)上針對(duì)低速泊車工況的縱向控制策略,VLC_AP根據(jù)TCH提供的加減速請(qǐng)求以及車輛當(dāng)前狀態(tài),判斷使用執(zhí)行器的種類,通過(guò)主動(dòng)控制發(fā)動(dòng)機(jī)扭矩或者向CDD請(qǐng)求制動(dòng)來(lái)調(diào)整要求的加減速度,從而保持車速和距離。
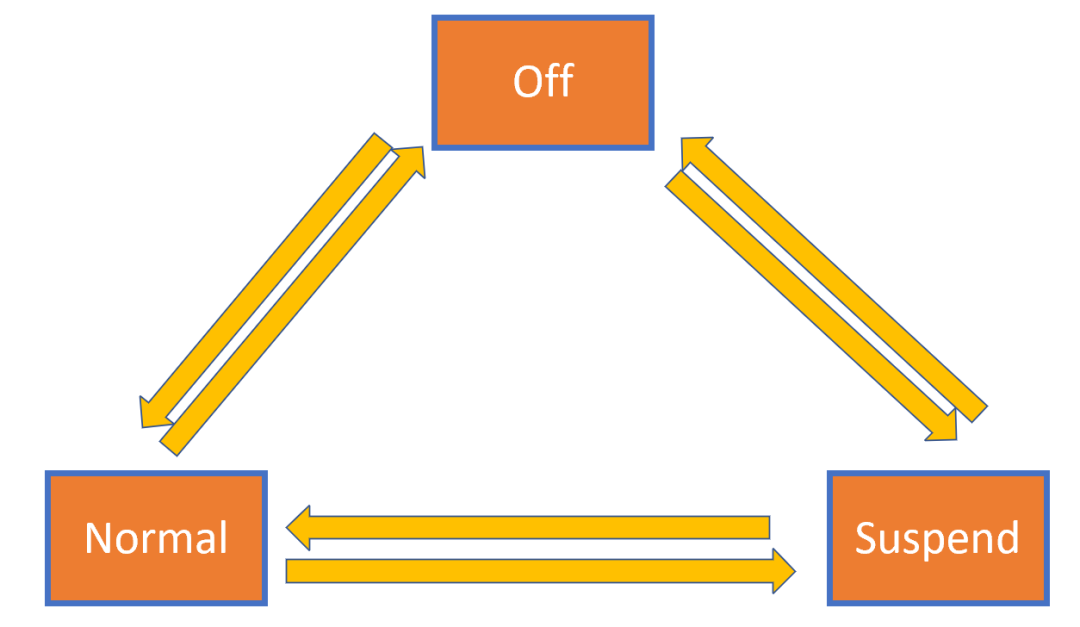
VLC狀態(tài)機(jī)
CDD全稱為適于駕駛員輔助系統(tǒng)的減速度控制(Controlled Deceleration for Driver Assistant System)功能,與VLC_AP類似,CDD_AP也是針對(duì)泊車工況進(jìn)行適配的制動(dòng)控制策略。在正常減速度控制模式下,CDD根據(jù)VLC的制動(dòng)請(qǐng)求,考慮目標(biāo)減速度和實(shí)際減速度的偏差,計(jì)算ESC液壓系統(tǒng)的目標(biāo)制動(dòng)壓力;另外,在車輛剎停-靜止-起步階段,CDD能夠幫助車輛進(jìn)行舒適剎停,防止急動(dòng)度過(guò)大造成車內(nèi)人員恐慌,在靜止階段對(duì)車輛進(jìn)行保壓,實(shí)時(shí)監(jiān)測(cè)車輛靜止?fàn)顟B(tài),一旦車輛發(fā)生溜車現(xiàn)象,及時(shí)進(jìn)行主動(dòng)增壓保證駐車安全,在起步過(guò)程中,根據(jù)輪端實(shí)時(shí)扭矩對(duì)制動(dòng)壓力進(jìn)行緩慢釋放,提高起步過(guò)程中的舒適性。
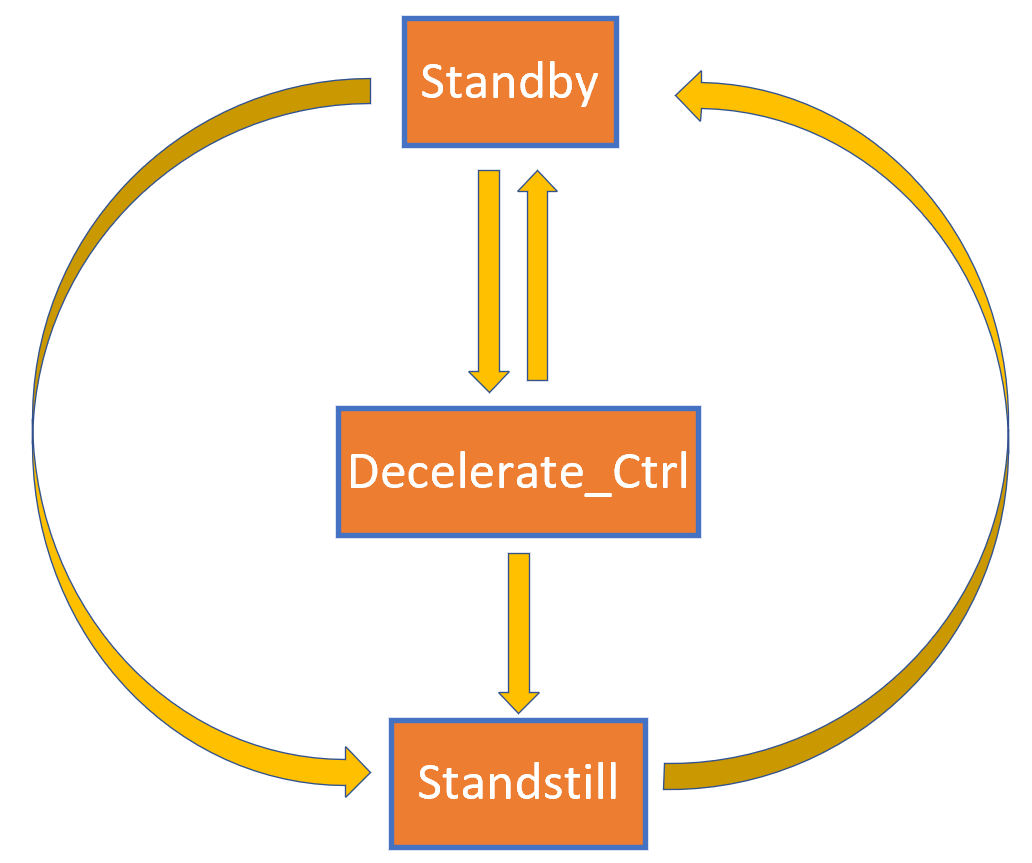
CDD狀態(tài)機(jī)
PSC為液壓系統(tǒng)控制模塊,CDD_AP將目標(biāo)壓力發(fā)送給PSC后,PSC通過(guò)控制電機(jī)閥和電機(jī)來(lái)實(shí)現(xiàn)輪缸壓力達(dá)到目標(biāo)值,由于ESC-Pro采用全新的電磁閥和柱塞泵設(shè)計(jì),PSC內(nèi)部的液壓?jiǎn)卧獏?shù)需要重新標(biāo)定,將液壓系統(tǒng)內(nèi)部各個(gè)單元進(jìn)行精確建模,對(duì)ESC內(nèi)部管路的流量和壓力進(jìn)行實(shí)時(shí)監(jiān)測(cè)。同時(shí)基于目標(biāo)制動(dòng)壓力與估計(jì)壓力設(shè)置合理的壓力控制策略,控制電磁閥和電機(jī)的占空比,從而實(shí)現(xiàn)精準(zhǔn)的壓力控制。
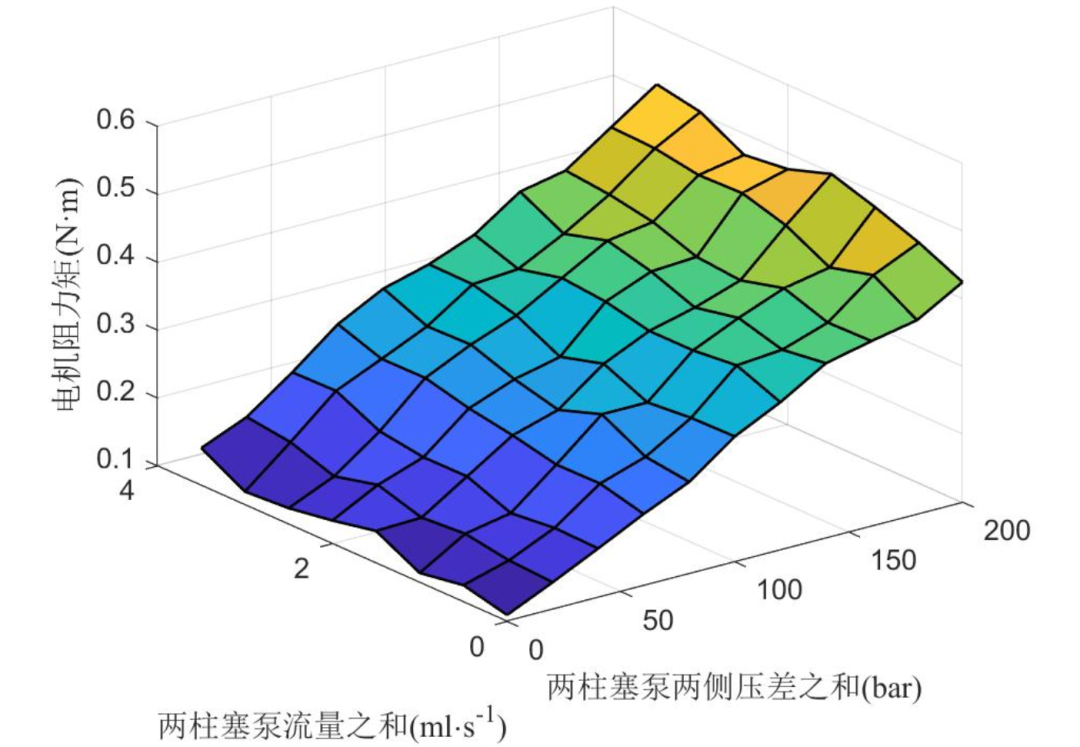
柱塞泵負(fù)載特性
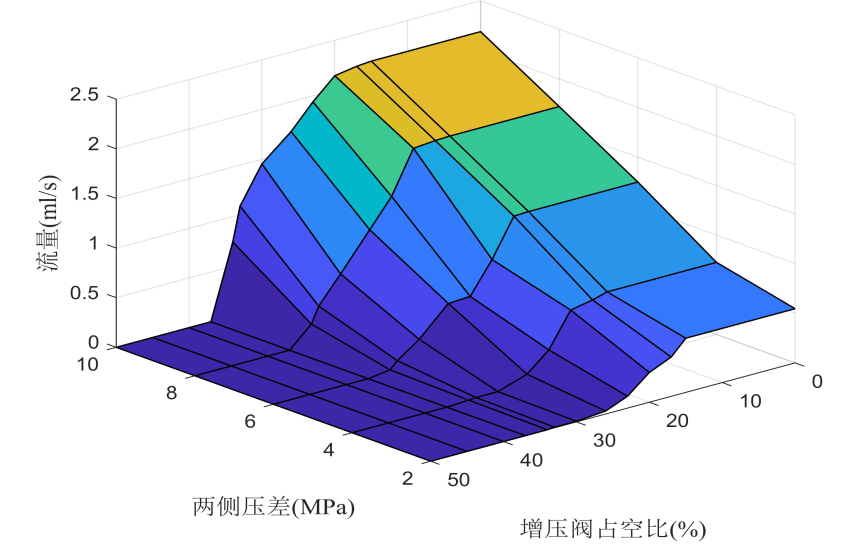
增壓閥流量特性
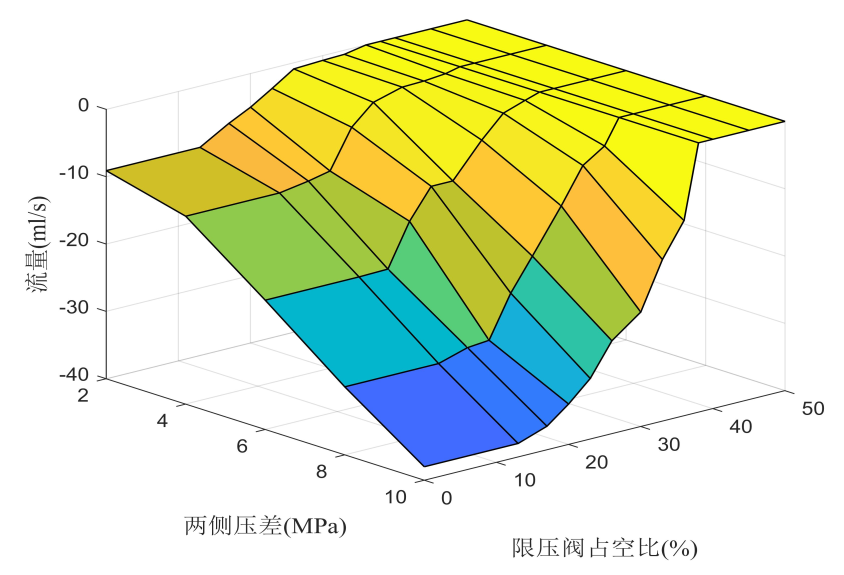
限壓閥流量特性
當(dāng)前,基于ESC-Pro線控制動(dòng)系統(tǒng)的APA整車性能參數(shù)可以達(dá)到以下要求:
(1)保證APA 距離請(qǐng)求為 0 時(shí) ESP 控制距離精度(絕對(duì)值)≤20cm;車輛最小起步車距15cm;
(2)車速超調(diào)量為限制車速的 50%或 1km/h中二者的最小值;APA功能支持的最大坡度 ≤5.5°(10%);
(3)滿足車輛加速度值 ≤1.5 m/s2 ;車輛加速度變化率 <15 m/s^3;
(4)滿足緊急制動(dòng)時(shí)ESP加速度值〉-5m/s2 ;舒適性制動(dòng)時(shí)ESP加速度值 >-1.5 m/s2;車輛減速度變化率 <15 m/s3;緊急制動(dòng)時(shí)ESP制動(dòng)響應(yīng)時(shí)間 ≤500 ms。
四、智能胎壓監(jiān)測(cè)系統(tǒng)
英創(chuàng)匯智Tri-TPMS是英創(chuàng)基于自主技術(shù)研發(fā)的新一代間接式胎壓監(jiān)測(cè)系統(tǒng)(iTPMS),相較于內(nèi)置胎壓傳感器方案,間接式胎壓監(jiān)測(cè)方案成本低、運(yùn)算快、維護(hù)方便,僅依靠輪速信號(hào)完成胎壓監(jiān)測(cè)全功能的實(shí)現(xiàn),但對(duì)算法的要求高,運(yùn)算量大。英創(chuàng)匯智堅(jiān)持自研間接式胎壓核心技術(shù),已經(jīng)攻克上述難題,產(chǎn)品性能具備顯著優(yōu)勢(shì)。
Tri-TPMS核心優(yōu)勢(shì):
1.更短的報(bào)警時(shí)間:對(duì)于1-3輪的欠壓工況可以在各種路段實(shí)現(xiàn)報(bào)警。
2.更廣的速度區(qū)間:本司產(chǎn)品在 35—240km/h 內(nèi)均可滿足1-3輪欠壓報(bào)警功能,四輪報(bào)警的速度范圍可根據(jù)客戶需求擴(kuò)展。
3. 更快的報(bào)警速度:針對(duì)歐標(biāo)要求,本司產(chǎn)品 1-3 輪欠壓報(bào)警時(shí)間一般在 8 分鐘以內(nèi)(歐標(biāo)要求10 分鐘以內(nèi)),4 輪欠壓報(bào)警時(shí)間 15 分鐘以內(nèi)(歐標(biāo)要求 60 分鐘以內(nèi))。
在算法策略上,當(dāng)前主流的間接式胎壓監(jiān)測(cè)算法有半徑法和頻率法。
半徑法
半徑法特點(diǎn):
1、欠壓輪胎半徑減小,轉(zhuǎn)速與其他胎有明顯差異;
2、四輪同時(shí)欠壓時(shí)無(wú)法監(jiān)測(cè);
3、對(duì)工況剔除的準(zhǔn)確度依賴較高;
頻率法
頻率法特點(diǎn):
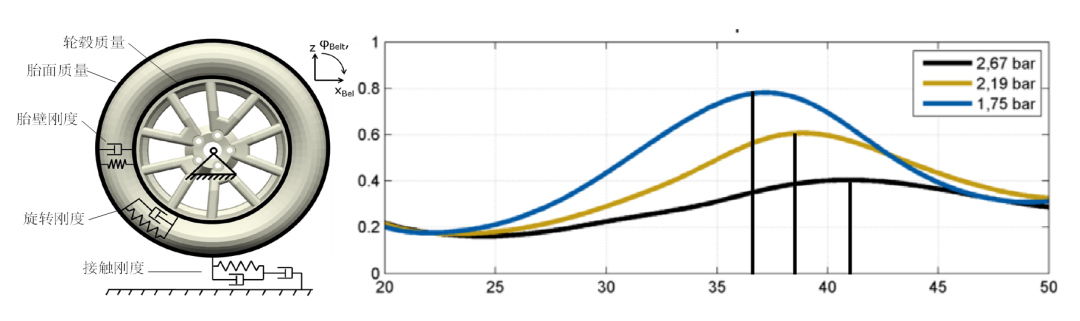
1、車輪欠壓時(shí)周向轉(zhuǎn)動(dòng)信號(hào)的固有頻率降低;
2、可精準(zhǔn)識(shí)別欠壓狀態(tài);
3、算法復(fù)雜度高;
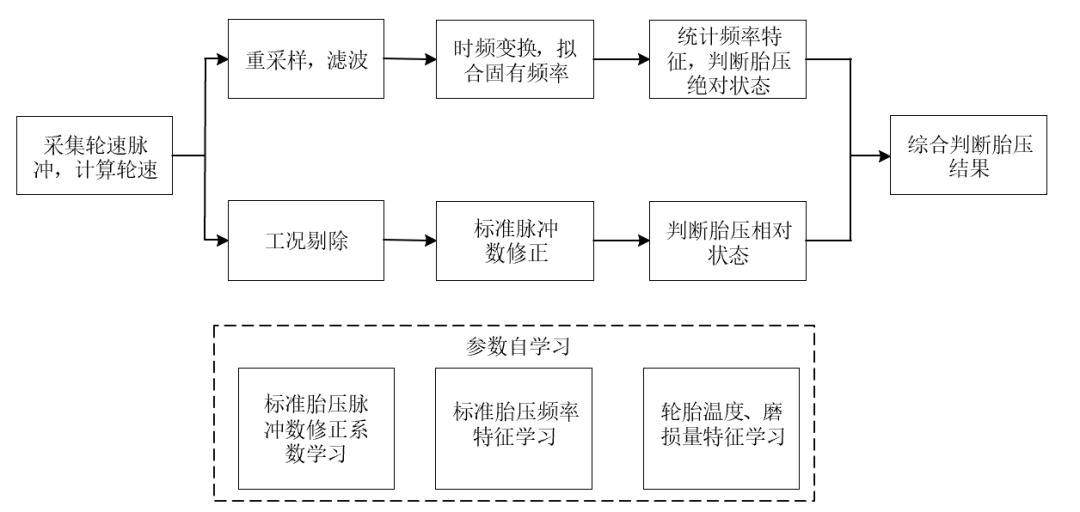
Tri-TPMS算法架構(gòu)
英創(chuàng)匯智采用半徑法和頻率法融合算法以及彈性計(jì)算架構(gòu)設(shè)計(jì),完美規(guī)避了間接式胎壓算法的固有缺點(diǎn)。利用半徑法識(shí)別相對(duì)胎壓,利用頻率法識(shí)別絕對(duì)胎壓,綜合考慮二者結(jié)果,快速判斷四輪胎壓狀態(tài)。
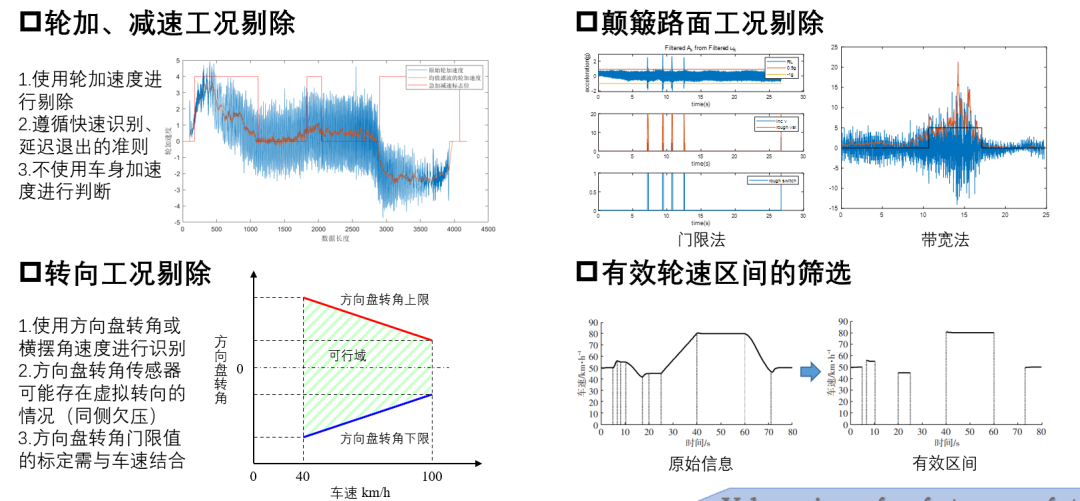
工況篩選策略
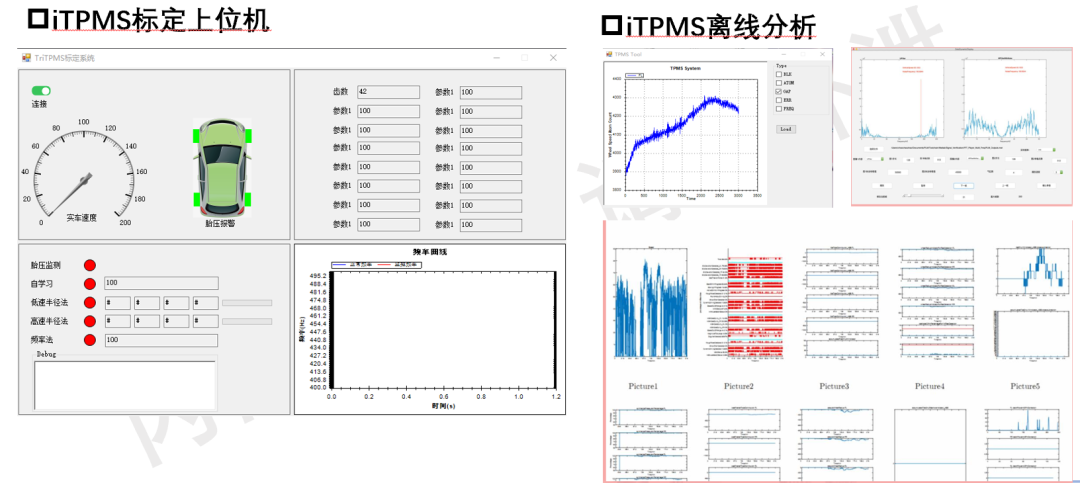
上位機(jī)標(biāo)定系統(tǒng)
五、基于攝像頭的路面附著系數(shù)預(yù)測(cè)
傳統(tǒng)的路面附著系數(shù)估計(jì)策略主要利用車輛動(dòng)力學(xué)信息進(jìn)行觀測(cè),但只有當(dāng)車輛與路面接觸且車輛動(dòng)態(tài)顯現(xiàn)后才能夠獲得真實(shí)的路面附著信息,難免存在滯后性。隨著汽車智能化的快速發(fā)展,越來(lái)越多的車輛搭載攝像頭和雷達(dá)等先進(jìn)傳感器,基于視覺(jué)信息的路面附著系數(shù)預(yù)測(cè)方法借助車載前置攝像頭提供的圖片信息,利用深度學(xué)習(xí)技術(shù)對(duì)車輛前方路面附著系數(shù)進(jìn)行識(shí)別,為后續(xù)ADAS的控制策略提供預(yù)測(cè)信息,提前做出控制指令,避免出現(xiàn)因路面附著不足而造成的上層目標(biāo)指令與實(shí)際執(zhí)行能力不匹配的現(xiàn)象。
隨著深度學(xué)習(xí)的快速發(fā)展以及智能化傳感器的加持,路面附著系數(shù)估計(jì)問(wèn)題不僅僅局限于傳統(tǒng)的動(dòng)力學(xué)模型策略中,可以進(jìn)一步將其歸為圖像分類問(wèn)題,基于底盤域控制器的高算力平臺(tái),利用卷積神經(jīng)網(wǎng)絡(luò)將路面圖像歸類為不同附著系數(shù)等級(jí),主要包括高附、中高附、中低附、低附四類路面情況(其中,路面附著系數(shù)0.7-1為高附,0.5-0.7為中高附,0.3-0.5為中低附,0-0.3為低附),在車輛前方提前預(yù)知路面狀態(tài),提前做出控制干預(yù),保證車輛的動(dòng)態(tài)穩(wěn)定性。
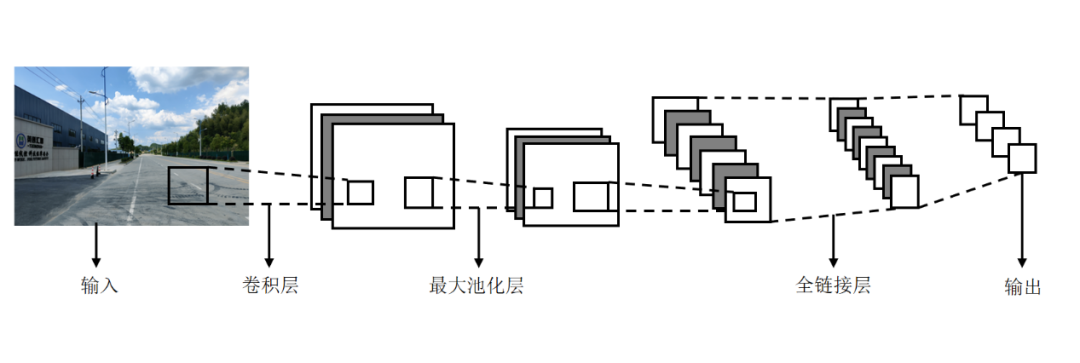
卷積神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)
結(jié)語(yǔ)
當(dāng)前,自動(dòng)駕駛行業(yè)蓬勃發(fā)展,智能汽車“大腦”(智能駕駛層)發(fā)展迅速,車輛智能化水平顯著提高,而智能汽車“小腦”(底盤執(zhí)行層)能夠配合“大腦”進(jìn)行精準(zhǔn)、安全的車輛控制,同樣也是智能汽車的核心部件,基于完全自主可控的智能汽車“小腦”是國(guó)內(nèi)汽車行業(yè)的“卡脖子”難題。英創(chuàng)匯智堅(jiān)持自主研發(fā),在線控底盤領(lǐng)域深耕多年,以T-IBWS為代表,自主開(kāi)發(fā)了多款線控底盤系列產(chǎn)品。T-IBWS以線控制動(dòng)執(zhí)行器為核心,能夠完全支持ADAS功能的底層控制需求,擁有多維車輛動(dòng)力學(xué)信息觀測(cè)策略,為駕駛員提供安全、舒適的乘車體驗(yàn)。
目前T-IBWS產(chǎn)品已經(jīng)在奇瑞、北汽、吉利等多個(gè)車型中完成標(biāo)定匹配,并且部分車型已經(jīng)完成量產(chǎn),該產(chǎn)品在耐久性、一致性以及安全性等多方面已經(jīng)完成了詳盡的測(cè)試驗(yàn)證。除ESC-Pro產(chǎn)品外,英創(chuàng)匯智線控制動(dòng)全系列產(chǎn)品(T-booster2.0、T-IBC等)均能支持T-IBWS。
未來(lái),基于英創(chuàng)匯智自研的底盤域控制器,將制動(dòng)、轉(zhuǎn)向、懸架、驅(qū)動(dòng)等底盤執(zhí)行器進(jìn)行協(xié)同控制,進(jìn)一步推出集成性更強(qiáng)、安全性更高的智能線控底盤一體化解決方案。
英創(chuàng)匯智堅(jiān)持自主創(chuàng)新、開(kāi)放交流,立志通過(guò)一流的產(chǎn)品和技術(shù)服務(wù)我國(guó)汽車工業(yè)自主可控戰(zhàn)略目標(biāo),為民族汽車工業(yè)做大做強(qiáng)貢獻(xiàn)力量!
責(zé)任編輯:彭菁
-
智能化
+關(guān)注
關(guān)注
15文章
5126瀏覽量
57253 -
智能汽車
+關(guān)注
關(guān)注
30文章
3088瀏覽量
108389 -
駕駛輔助
+關(guān)注
關(guān)注
0文章
37瀏覽量
10072 -
英創(chuàng)匯智
+關(guān)注
關(guān)注
0文章
33瀏覽量
666 -
域控制器
+關(guān)注
關(guān)注
0文章
276瀏覽量
3081
原文標(biāo)題:智能線控制動(dòng)系統(tǒng)解決方案,為高級(jí)駕駛輔助賦能!
文章出處:【微信號(hào):trinova-tech,微信公眾號(hào):英創(chuàng)匯智】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
智能駕駛域控制器的SoC芯片選型
英恒科技正式發(fā)布CAELUS自動(dòng)駕駛域控制器開(kāi)源計(jì)劃
知行科技自研的行泊一體域控制器產(chǎn)品如何
底盤域控制器概述、功能及特點(diǎn)
大陸集團(tuán)將安霸CV3 AI域控制器SoC主芯片集成到其高級(jí)駕駛輔助系統(tǒng)中
解讀禾多科技自研域控制器智能駕駛域控的技術(shù)方案
底盤域控制器(CDC)

蔚來(lái)輔助駕駛芯片將量產(chǎn),車企自研芯片即將步入收獲期
汽車五大域控制器有哪些?汽車域控制器和ecu的區(qū)別
Hailo-8 AI加速器與瑞薩R-Car SoC為知行科技的iDC High域控制器賦能

國(guó)芯科技與英創(chuàng)匯智攜手推進(jìn)新能源汽車線控底盤技術(shù)
經(jīng)緯恒潤(rùn)全棧自研底盤域控制器量產(chǎn)

經(jīng)緯恒潤(rùn)全棧底盤域控制器成功量產(chǎn),開(kāi)啟智能出行新篇章
愛(ài)普生 SG-8101CGA:ADAS 智能駕駛域控制器的 “智慧芯” 動(dòng)力





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論