") “麥克斯韋”斷電了?NASA X-57項(xiàng)目將在不進(jìn)行電動(dòng)飛行的情況下結(jié)束
“麥克斯韋”斷電了?NASA X-57項(xiàng)目將在不進(jìn)行電動(dòng)飛行的情況下結(jié)束
在歷經(jīng)了多年的各種技術(shù)問題和挫折后,美國(guó)國(guó)家航空航天局(NASA)于6月23日決定將在不進(jìn)行試飛的情況下,于2023年9月底結(jié)束X-57“麥克斯韋”(Maxwell)電動(dòng)飛機(jī)演示項(xiàng)目。
X-57“麥克斯韋”項(xiàng)目將在沒有實(shí)現(xiàn)電動(dòng)飛行的情況下結(jié)束。
在宣布這一決定的同時(shí),X-57項(xiàng)目還透露發(fā)現(xiàn)了需要很長(zhǎng)時(shí)間才能修復(fù)的“故障”。X-57項(xiàng)目的首席研究員肖恩·克拉克表示:“在此前對(duì)電動(dòng)機(jī)進(jìn)行詳細(xì)分析和適航評(píng)估時(shí),發(fā)現(xiàn)其在飛機(jī)飛行時(shí)有一些未在地面測(cè)試期間被發(fā)現(xiàn)的潛在故障模式。該電動(dòng)機(jī)設(shè)計(jì)有幾個(gè)特殊的故障模式,并可能會(huì)在飛行中停車,以此對(duì)飛行員造成安全隱患。”
X-57項(xiàng)目的工作人員目前仍在分析和試圖解決這一問題,并拒絕透露該問題相關(guān)的更多細(xì)節(jié)。克拉克表示:“我們正在通過大規(guī)模的重新設(shè)計(jì)來修復(fù)電動(dòng)機(jī),但這需要很長(zhǎng)時(shí)間才能完成和實(shí)施”。
這也促使X-57最終將在沒實(shí)現(xiàn)電動(dòng)飛行演示的情況下落幕。
1.X-57項(xiàng)目概況
X-57“麥克斯韋”的命名是為紀(jì)念著名的物理學(xué)家麥克斯韋。該驗(yàn)證機(jī)基于4座的“泰克南”(Tecnam)P2006T渦槳飛機(jī)改造而來,目的是驗(yàn)證全電動(dòng)飛機(jī)技術(shù)和分布式動(dòng)力增升技術(shù),后者是一架常規(guī)布局的輕型雙發(fā)飛機(jī),機(jī)體結(jié)構(gòu)重量很輕,因此被選作為基準(zhǔn)機(jī)。
X-57項(xiàng)目的根本任務(wù)是技術(shù)突破,這也符合X系列試驗(yàn)機(jī)的一貫宗旨,研究的重點(diǎn)主要涉及氣動(dòng)布局和能源系統(tǒng)。
在氣動(dòng)設(shè)計(jì)方面,主要研究?jī)?nèi)容包括機(jī)翼設(shè)計(jì)、螺旋槳設(shè)計(jì)和附面層控制技術(shù)。為了兼顧高速特性和低速特性,最終的機(jī)翼設(shè)計(jì)方案進(jìn)行了折中考慮。高速飛行時(shí),靠大展弦比和翼尖螺旋槳實(shí)現(xiàn)高效巡航,這兩個(gè)設(shè)計(jì)特征都可以減小機(jī)翼的誘導(dǎo)阻力。低速飛行時(shí),機(jī)翼前緣的高升力推進(jìn)器運(yùn)轉(zhuǎn),使機(jī)翼上方氣流加速,同時(shí)還有改善附面層狀態(tài)的環(huán)量分布的能力,借此獲得很高的升力系數(shù),實(shí)現(xiàn)較短的起飛和著陸距離。
整個(gè)項(xiàng)目的關(guān)鍵是驗(yàn)證分布式電推進(jìn)技術(shù),還包括電動(dòng)機(jī)設(shè)計(jì)制造、電機(jī)熱管理技術(shù)、高能電池集成技術(shù)、電能分配與管理技術(shù)等等。
X-57項(xiàng)目的研究的重點(diǎn)主要涉及氣動(dòng)布局和能源系統(tǒng)。
雖然X-57與P2006T都采用常規(guī)布局,但X-57的機(jī)翼和氣動(dòng)力發(fā)生了很大變化。一是為提升氣動(dòng)效率而增大了機(jī)翼的展弦比。二是將兩個(gè)動(dòng)力螺旋槳移至翼尖,在提供巡航推進(jìn)力的同時(shí),也寄希望螺旋槳的旋流能夠抵消翼尖渦,降低誘導(dǎo)阻力。三是在機(jī)翼前緣沿翼展方向分布式加裝了12個(gè)電動(dòng)螺旋槳,每側(cè)機(jī)翼各6個(gè),這些被稱為“高升力推進(jìn)器”,用于在起降階段增加機(jī)翼的升力,改善起降性能。在巡航階段,這些“高升力推進(jìn)器”并不運(yùn)作,螺旋槳槳葉也會(huì)折疊起來,以減小阻力。
按原本的計(jì)劃,X-57項(xiàng)目主要分為四個(gè)階段,NASA稱之為“構(gòu)型演進(jìn)”,簡(jiǎn)稱“Mod”,四個(gè)階段分別為Mod I、Mod II、Mod III和Mod IV。
Mod I階段:主要工作有兩部分,測(cè)試P2006T飛機(jī)基本性能并研究電力推進(jìn)概念,包括明確研發(fā)需求,進(jìn)行飛機(jī)結(jié)構(gòu)與子系統(tǒng)分析、設(shè)計(jì)與測(cè)試和分布式電推進(jìn)系統(tǒng)的相關(guān)評(píng)估,會(huì)用地面試驗(yàn)臺(tái)測(cè)試安裝分布式高升力系統(tǒng)的機(jī)翼。
Mod II階段:將P2006T的兩臺(tái)Rotax活塞發(fā)動(dòng)機(jī)換為電動(dòng)機(jī),這一階段全機(jī)的構(gòu)型并未改變,只是將發(fā)動(dòng)機(jī)在原位替換。目的是測(cè)試電動(dòng)機(jī)、電池和儀表的性能,建立全電動(dòng)系統(tǒng)的設(shè)計(jì)方法和對(duì)全電動(dòng)系統(tǒng)的安全性進(jìn)行驗(yàn)證。
Mod III階段:將采用較薄的大展弦比復(fù)合材料機(jī)翼替換P2006T飛機(jī)的原始機(jī)翼,并將電動(dòng)機(jī)和螺旋槳移至翼尖。機(jī)翼上安裝了分布式發(fā)動(dòng)機(jī)的短艙,但沒有安裝電機(jī)和螺旋槳。該階段的目標(biāo)是驗(yàn)證全機(jī)的高速性能,研究大展弦比機(jī)翼和翼尖推進(jìn)方案的減阻效果。
Mod IV階段:加裝分布式電機(jī)和螺旋槳,主要研究低速性能,測(cè)試12個(gè)“高升力推進(jìn)器”的效能,并與原始機(jī)型進(jìn)行對(duì)比分析。
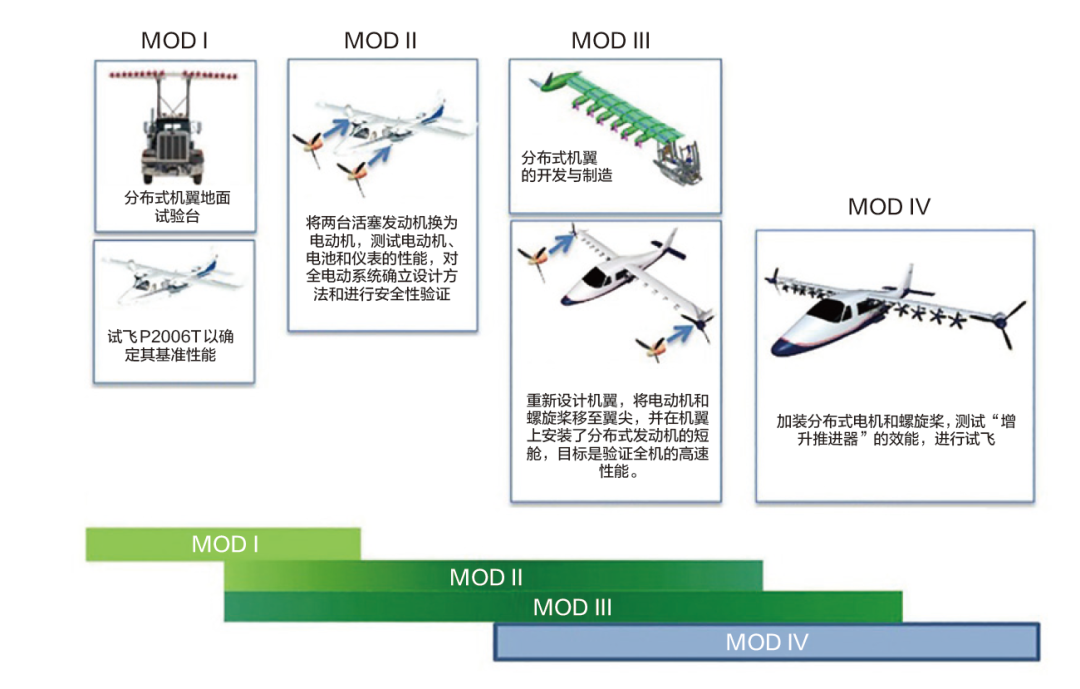
X-57的4個(gè)研究階段及其構(gòu)型。
2.X-57項(xiàng)目的發(fā)展
2015年,NASA對(duì)一架P2006T飛機(jī)進(jìn)行了試飛,收集了升力、推力、巡航效率、能源使用和乘坐體驗(yàn)等數(shù)據(jù)。從2016年7月開始,用于X-57項(xiàng)目的P2006T機(jī)身和機(jī)翼開始在實(shí)驗(yàn)系統(tǒng)航宇公司的工廠改裝,并與縮比復(fù)材公司共同負(fù)責(zé)將電力系統(tǒng)集成到P2006T機(jī)身。
NASA測(cè)試分布式高升力系統(tǒng)的地面試驗(yàn)臺(tái)。
NASA阿姆斯特朗研究中心在2018年1月使用的“Airvolt”測(cè)試臺(tái)開始對(duì)巡航電動(dòng)機(jī)進(jìn)行地面測(cè)試;2019年完成Mod III和Mod IV階段的大展弦比機(jī)翼的載荷測(cè)試。NASA蘭利研究中心于2020年在低速氣動(dòng)聲學(xué)風(fēng)洞中完成了“高升力推進(jìn)器”的測(cè)試。
最初,NASA計(jì)劃最快在2018年進(jìn)行X-57 Mod II的電動(dòng)首飛。但是由于存在電池系統(tǒng)、電氣控制系統(tǒng)和電磁干擾等技術(shù)問題,以及之后的新冠疫情的爆發(fā),使得該項(xiàng)目的進(jìn)度大大落后于計(jì)劃,目前仍停留在Mod II階段。
在2023年6月15日舉行的AIAA航空論壇上,X-57項(xiàng)目表示發(fā)現(xiàn)了使用的工業(yè)級(jí)滾珠軸承存在問題,迫使飛機(jī)重新設(shè)計(jì)了電動(dòng)機(jī),不過目前尚不清楚滾珠軸承問題是否與潛在的電機(jī)停車有關(guān)。
NASA格倫研究中心系統(tǒng)工程師戴夫·阿萬尼森表示,X-57的兩臺(tái)推進(jìn)電動(dòng)機(jī)中選擇的滾珠軸承等級(jí)“低于航空標(biāo)準(zhǔn)”,由此導(dǎo)致了無法預(yù)見的問題。由于滾珠軸承存在偏差,也導(dǎo)致在其他方面存在“超乎預(yù)期的振動(dòng)”。 目前,由于種種故障與意外造成的監(jiān)督延誤,使NASA已經(jīng)放棄了Mod III和Mod IV的配置,轉(zhuǎn)而利用剩余時(shí)間嘗試使修改Mod II,即便Mod II版本也將不會(huì)飛行。NASA選擇將利用剩余的時(shí)間完成一些預(yù)期的技術(shù)驗(yàn)證,并發(fā)表相關(guān)論文去分享技術(shù)成果。
//3.小編淺見
看到X-57將以這種形式結(jié)束,還是感到幾分意外,但或許也是情理之中。
一方面,在強(qiáng)調(diào)可持續(xù)航空的當(dāng)下,電動(dòng)飛機(jī)無疑是重要的發(fā)展方向。而隨著近年來的不斷發(fā)展,可持續(xù)航空燃料(SAF)、氫動(dòng)力以及混合動(dòng)力似乎是當(dāng)下更為可行的選擇。許多航空公司與發(fā)動(dòng)機(jī)制造商的已經(jīng)開始了SAF的試運(yùn)營(yíng),Zeroavia的氫燃料驗(yàn)證機(jī)也多次成功試飛,這些或許比純電動(dòng)飛機(jī)有著更快、更現(xiàn)實(shí)的發(fā)展。
另一方面,全球電動(dòng)飛機(jī)的發(fā)展或許比預(yù)想的要更快,尤其是在空中出租車領(lǐng)域。經(jīng)過了幾年的大浪淘沙,目前還留存在該領(lǐng)域的喬比航空、Lilium、Volocopter等公司都在逐漸殺出自己的道路,各型飛行器的動(dòng)力模式也都各具特點(diǎn),使得相關(guān)的電推進(jìn)、電動(dòng)機(jī)設(shè)計(jì)制造、熱管理、高能電池集成等技術(shù)的發(fā)展比預(yù)期的更快。
-
電力
+關(guān)注
關(guān)注
7文章
2220瀏覽量
51041 -
電動(dòng)機(jī)
+關(guān)注
關(guān)注
75文章
4151瀏覽量
98263 -
推進(jìn)器
+關(guān)注
關(guān)注
1文章
35瀏覽量
5083
原文標(biāo)題:“麥克斯韋”斷電了?NASA X-57項(xiàng)目將在不進(jìn)行電動(dòng)飛行的情況下結(jié)束
文章出處:【微信號(hào):CloudBrain-TT,微信公眾號(hào):云腦智庫(kù)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
NRF24L01項(xiàng)目資料(2.4G通信)實(shí)例項(xiàng)目下載
高速數(shù)字接口中EMI如何消除,七種方法分享給你

精通開關(guān)電源設(shè)計(jì)(中文)[美 馬尼克塔拉]
ldc1000的spi通信,為什么在這種情況下都寫不進(jìn)數(shù)據(jù),讀數(shù)據(jù)也每次不一樣?
天線的材料和工藝種類
STM32項(xiàng)目實(shí)戰(zhàn):基于STM32U5的智能大棚溫控系統(tǒng)(LVGL),附項(xiàng)目教程/源碼

STM32項(xiàng)目實(shí)戰(zhàn):基于STM32U5的火災(zāi)報(bào)警系統(tǒng)(LVGL),附項(xiàng)目教程/源碼
光學(xué)薄膜制備設(shè)備介紹之蒸發(fā)鍍膜機(jī)
plc什么情況下會(huì)導(dǎo)致程序丟失
基于迅為RK3588【RKNPU2項(xiàng)目實(shí)戰(zhàn)1】:YOLOV5實(shí)時(shí)目標(biāo)分類
STM32項(xiàng)目分享:智能家居(機(jī)智云)系統(tǒng)

什么情況下會(huì)產(chǎn)生零序電流
受控源什么情況下可看為電阻
RTOS SDK 2.1有沒有辦法在不進(jìn)入深度睡眠模式的情況下單獨(dú)關(guān)閉WiFi?
AnyWay零磁通電流傳感器的工作原理





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論