") 【技術(shù)分享】ZTP800示教器的開發(fā)測試過程
【技術(shù)分享】ZTP800示教器的開發(fā)測試過程

示教器的使用環(huán)境通常是電磁干擾、溫濕度變化、灰塵覆蓋等多變的工業(yè)場所,同時示教器作為手持操作裝置,也存在脫手跌落、振動沖擊等可能性。那么示教器該如何應(yīng)對?ZTP800示教器的開發(fā)測試過程告訴你。ZTP800示教器(移動HMI)是廣州致遠電子股份有限公司開發(fā)的最新一代智能機器人示教器(移動HMI),產(chǎn)品在開發(fā)設(shè)計過程中,通過了環(huán)境/EMC/防塵/跌落/振動/懸掛等一系列的嚴格測試,使得ZTP800示教器可以自由應(yīng)對各種復(fù)雜甚至惡劣的使用環(huán)境,滿足不同場景使用的需求。
1.環(huán)境適應(yīng)性測試ZTP800示教器的使用環(huán)境除了常溫,也會在低溫、高溫、溫度急劇變化、濕熱等環(huán)境下運行,根據(jù)GB/T 2423.1-2008、GB/T 2423.2-2008、GB/T 2423.3-2016、GB/T 2423.22-2012等標準,ZTP800示教器的工作溫度范圍為﹣10℃~﹢50℃、貯存溫度范圍為﹣20℃~﹢60℃的條件下,進行功能測試并判定通過。如圖1所示。 圖12.電磁兼容性測試示教器的應(yīng)用場合是工廠自動化、機器人控制等工業(yè)場合,電磁環(huán)境復(fù)雜多變。ZTP800示教器同樣進行各種電磁兼容性項目的嚴格測試并判定通過,其測試結(jié)果如表1所示。
圖12.電磁兼容性測試示教器的應(yīng)用場合是工廠自動化、機器人控制等工業(yè)場合,電磁環(huán)境復(fù)雜多變。ZTP800示教器同樣進行各種電磁兼容性項目的嚴格測試并判定通過,其測試結(jié)果如表1所示。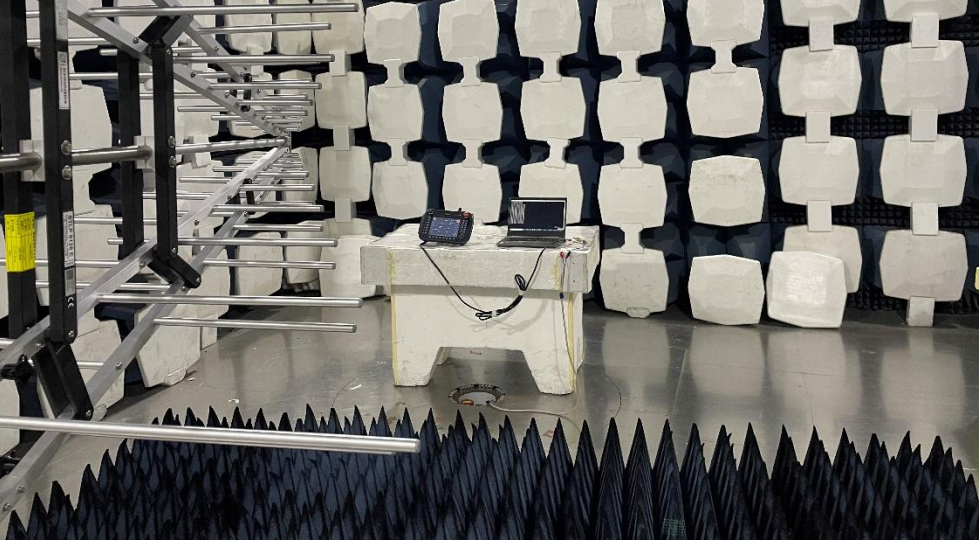 圖2
圖2 圖3表1ZTP800電磁兼容(EMC)特性參數(shù)
圖3表1ZTP800電磁兼容(EMC)特性參數(shù)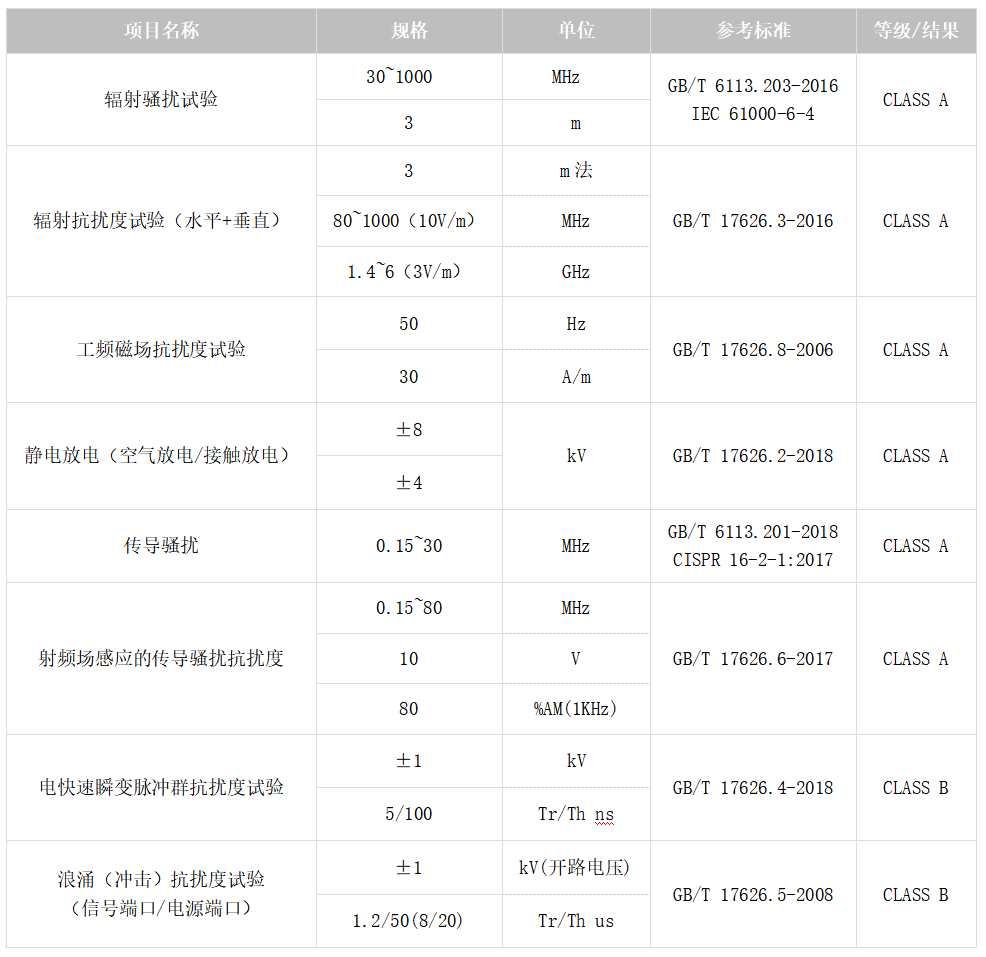 3. 功能性能測試ZTP800示教器在開關(guān)機、復(fù)位、以太網(wǎng)、USB、TF卡、RTC、蜂鳴器、固件燒寫、UART、CAN、LCD觸摸顯示、按鍵旋鈕、掉電續(xù)航等項目上,按照ZLG致遠電子公司內(nèi)部的產(chǎn)品測試標準,全部進行測試并判定通過。特別是以太網(wǎng)/CAN/RS485等通信接口都有12小時以上的穩(wěn)定性測試記錄,其中以太網(wǎng)的速率測試結(jié)果如表2、表3所示。表2ZTP800以太網(wǎng)發(fā)送速率測試結(jié)果
3. 功能性能測試ZTP800示教器在開關(guān)機、復(fù)位、以太網(wǎng)、USB、TF卡、RTC、蜂鳴器、固件燒寫、UART、CAN、LCD觸摸顯示、按鍵旋鈕、掉電續(xù)航等項目上,按照ZLG致遠電子公司內(nèi)部的產(chǎn)品測試標準,全部進行測試并判定通過。特別是以太網(wǎng)/CAN/RS485等通信接口都有12小時以上的穩(wěn)定性測試記錄,其中以太網(wǎng)的速率測試結(jié)果如表2、表3所示。表2ZTP800以太網(wǎng)發(fā)送速率測試結(jié)果 表3ZTP800以太網(wǎng)接收速率測試結(jié)果
表3ZTP800以太網(wǎng)接收速率測試結(jié)果 4. 振動與沖擊測試產(chǎn)品在生產(chǎn)、組裝、運輸、使用等過程環(huán)節(jié),都有可能帶有機械環(huán)境的變化,包括振動和沖擊。ZTP800示教器分別在帶包裝和裸機的情況下,根據(jù)GB/T 2423.10-2019、GB/T 2423.5-2019的試驗方法,進行10Hz~50Hz的振動和峰值加速度為150m/s2的X/Y/Z三軸的沖擊測試并判定通過。如圖4所示。
4. 振動與沖擊測試產(chǎn)品在生產(chǎn)、組裝、運輸、使用等過程環(huán)節(jié),都有可能帶有機械環(huán)境的變化,包括振動和沖擊。ZTP800示教器分別在帶包裝和裸機的情況下,根據(jù)GB/T 2423.10-2019、GB/T 2423.5-2019的試驗方法,進行10Hz~50Hz的振動和峰值加速度為150m/s2的X/Y/Z三軸的沖擊測試并判定通過。如圖4所示。 圖45. 跌落測試示教器作為手持操作裝置,在使用或者懸掛的過程中,都會存在自由跌落的可能性。為給用戶增強使用產(chǎn)品的信心,ZTP800示教器根據(jù)GB/T 2423.7-2018標準,結(jié)合實際使用環(huán)境,進行了1米高度的跌落測試并判定通過。如圖5所示。
圖45. 跌落測試示教器作為手持操作裝置,在使用或者懸掛的過程中,都會存在自由跌落的可能性。為給用戶增強使用產(chǎn)品的信心,ZTP800示教器根據(jù)GB/T 2423.7-2018標準,結(jié)合實際使用環(huán)境,進行了1米高度的跌落測試并判定通過。如圖5所示。 圖56.防塵(IP6X)測試在工廠自動化、機器人控制等工業(yè)場合下,灰塵也是影響產(chǎn)品長期使用的一個隱患,為應(yīng)對此隱患,ZTP800示教器從設(shè)計方案就在結(jié)構(gòu)上做了處理。根據(jù)GB/T 4208-2017外殼防護等級進行IP6X防塵測試并判定通過,如圖6所示。
圖56.防塵(IP6X)測試在工廠自動化、機器人控制等工業(yè)場合下,灰塵也是影響產(chǎn)品長期使用的一個隱患,為應(yīng)對此隱患,ZTP800示教器從設(shè)計方案就在結(jié)構(gòu)上做了處理。根據(jù)GB/T 4208-2017外殼防護等級進行IP6X防塵測試并判定通過,如圖6所示。
 圖67. 懸掛測試ZTP800示教器后殼設(shè)計有一個提手,可懸掛示教器到機柜、墻壁等地方。為了防止示教器提手斷裂導(dǎo)致示教器跌落,在提手設(shè)計時就對結(jié)構(gòu)和材料進行加強處理,同時還專門進行了加重5KG的長期懸掛測試(目前已經(jīng)連續(xù)懸掛6個月的時間,暫時提手沒有斷裂現(xiàn)象),如圖7所示。
圖67. 懸掛測試ZTP800示教器后殼設(shè)計有一個提手,可懸掛示教器到機柜、墻壁等地方。為了防止示教器提手斷裂導(dǎo)致示教器跌落,在提手設(shè)計時就對結(jié)構(gòu)和材料進行加強處理,同時還專門進行了加重5KG的長期懸掛測試(目前已經(jīng)連續(xù)懸掛6個月的時間,暫時提手沒有斷裂現(xiàn)象),如圖7所示。 圖7如需測試報告,請聯(lián)系致遠電子技術(shù)支持中心。
圖7如需測試報告,請聯(lián)系致遠電子技術(shù)支持中心。
-
測試
+關(guān)注
關(guān)注
8文章
5694瀏覽量
128808 -
示教器
+關(guān)注
關(guān)注
2文章
30瀏覽量
3981
發(fā)布評論請先 登錄
人形機器人背后的“靈魂導(dǎo)師”:工程師示教的價值與富唯智能的實踐

拖動示教噴涂設(shè)備有哪些部件組成?

智能拖動示教噴涂機器人:技術(shù)革新與未來展望

三分鐘讓你明白拖動示教噴涂機器移動速度是多少
訊維分布式可視化醫(yī)療示教系統(tǒng),開啟智慧醫(yī)療,遠程示教全新應(yīng)用

示教器的革新:無線連接,無限可能

什么是拖動示教?機器人拖動示教方式分析

協(xié)作機器人拽拖示教詳解
TLV320AIC3254EVM-U開發(fā)板測試過程中突然不能使用,總是燒錄失敗的原因?
單片機基本io功能調(diào)試過程
焊接機器人示教模式怎么設(shè)置

工業(yè)機器人示教器按鈕功能介紹
【AWTK使用經(jīng)驗】如何實現(xiàn)序列幀動畫





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論