") 利用低帶寬高動(dòng)態(tài)范圍 (eHDR) 技術(shù),提高工業(yè)自動(dòng)化系統(tǒng)的精度
利用低帶寬高動(dòng)態(tài)范圍 (eHDR) 技術(shù),提高工業(yè)自動(dòng)化系統(tǒng)的精度
點(diǎn)擊藍(lán)字關(guān)注我們
為了提高效率和性能,工業(yè)自動(dòng)化越來越受歡迎。在自主移動(dòng)機(jī)器人 (AMR)、倉庫機(jī)器人、無人機(jī)、農(nóng)業(yè)、工廠檢查和安防/監(jiān)控等應(yīng)用場景,會(huì)實(shí)施基于機(jī)器視覺的人工智能 (AI) 與先進(jìn)技術(shù)來執(zhí)行關(guān)鍵功能。要想提高現(xiàn)有的對象檢測和識(shí)別能力,需要解決在不利光照條件下,對運(yùn)動(dòng)中的對象和更遠(yuǎn)距離的精細(xì)細(xì)節(jié)捕獲圖像的難題。安森美(onsemi)新推出的AR0822傳感器具備嵌入式高動(dòng)態(tài)范圍 (eHDR) 功能,可解決工程師在開發(fā)自主機(jī)器視覺系統(tǒng)時(shí)面臨的復(fù)雜設(shè)計(jì)挑戰(zhàn)。高動(dòng)態(tài)范圍在工業(yè)自動(dòng)化中的重要性
許多工業(yè)應(yīng)用的工作場景中,光線刺眼,且明亮區(qū)域和黑暗區(qū)域同時(shí)存在。例如,室外 AMR 必須在同時(shí)存在陽光和黑暗區(qū)域的場景中精確運(yùn)行;監(jiān)控系統(tǒng)警報(bào)是否觸發(fā),取決于能否辨別未授權(quán)人員從黑暗區(qū)域移動(dòng)到明亮區(qū)域。雖然工廠工程師會(huì)控制照明以便在需要捕捉畫面細(xì)節(jié)的地方達(dá)到理想亮度水平,但有些倉庫可能無法控制照明,或者可能需要花費(fèi)高昂的成本進(jìn)行重建。此外,工業(yè)機(jī)器人應(yīng)該能夠延伸到多個(gè)位置進(jìn)行操作,而這可能會(huì)出現(xiàn)不確定的光照條件。例如,運(yùn)輸包裹的無人機(jī)在夜間或高強(qiáng)度陽光下,可能就會(huì)遇到這種情況。這幾個(gè)例子說明這些自主系統(tǒng)必須在高動(dòng)態(tài)范圍場景下運(yùn)行。
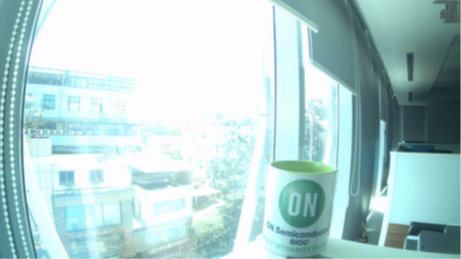
多次曝光 = 更高的動(dòng)態(tài)范圍 傳感器的動(dòng)態(tài)范圍是指圖像傳感器在黑暗和明亮區(qū)域中捕獲圖像細(xì)節(jié)的能力,測量單位為分貝 (dB)。一般而言,120 dB 的動(dòng)態(tài)范圍可捕獲除極端場景以外的所有場景中的細(xì)節(jié)(汽車應(yīng)用需要更高的動(dòng)態(tài)范圍,尤其是在乘客安全方面)。在這類包含黑暗和明亮區(qū)域的場景中,如果使用單次長曝光,可能會(huì)導(dǎo)致明亮區(qū)域過飽和;而單次短曝光可能無法捕獲到暗處的細(xì)節(jié)。 圖 1. 圖像顯示,曝光時(shí)間較短可捕獲明亮區(qū)域的細(xì)節(jié),但會(huì)丟失黑暗區(qū)域的細(xì)節(jié)
圖 1. 圖像顯示,曝光時(shí)間較短可捕獲明亮區(qū)域的細(xì)節(jié),但會(huì)丟失黑暗區(qū)域的細(xì)節(jié)

現(xiàn)在,憑借一系列從亮到暗的細(xì)節(jié),人工智能識(shí)別系統(tǒng)可提高辨認(rèn)和識(shí)別性能。
高分辨率挑戰(zhàn)
如果識(shí)別距離更遠(yuǎn),圖像細(xì)節(jié)更多,則需要更高的分辨率。與對象相距 5 至 10 米遠(yuǎn)時(shí),1080p 不足以提供對象檢測和分類所需的細(xì)節(jié)。因此,對 4K、甚至更高分辨率傳感器的需求不斷增加。對于這些尺寸的圖像,帶寬成為一大設(shè)計(jì)挑戰(zhàn),因?yàn)槊繌垐D像的尺寸顯著增加。此外,如果要實(shí)現(xiàn) 120 dB HDR,傳感器需要三次曝光和 3 倍的有效幀率,因?yàn)閭鞲衅鲿?huì)為每幀拍攝三張不同的圖像。例如,對于三次曝光 HDR,如果傳感器的有效幀率為每秒 30 幀 (fps),則傳感器陣列、電路和輸出需要在 90 fps 幀率有效工作。幀率為 30 fps 的三次曝光 HDR 4K 圖像如果在獨(dú)立于傳感器的 ISP 中執(zhí)行線性化,需要 9000 Mbps,這對處理性能和接口速度是一大挑戰(zhàn)。對于攝像頭系統(tǒng),將高分辨率與傳感器外 HDR 相結(jié)合是一項(xiàng)艱巨的挑戰(zhàn)。
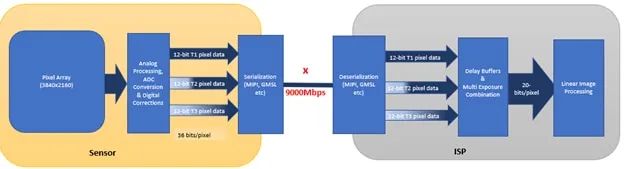
圖 4. 典型的高動(dòng)態(tài)范圍架構(gòu)通過圖像傳感器和 ISP 之間的接口發(fā)送多張圖像,在高分辨率時(shí)可能會(huì)導(dǎo)致可用帶寬緊張或超出可用帶寬
為了緩解這兩個(gè)問題,安森美AR0822 通過將實(shí)時(shí)線性化集成到傳感器中,智能地嵌入高動(dòng)態(tài)范圍。如此一來,即便是在更高分辨率時(shí),傳統(tǒng)的處理性能和接口速度也更容易滿足需求。
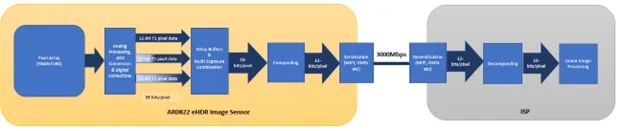
圖 5. AR0822 嵌入式高動(dòng)態(tài)范圍 (eHDR) 圖像傳感器
運(yùn)動(dòng)和 LED 照明偽影
由于三次曝光是在不同的時(shí)間點(diǎn)進(jìn)行,所以 HDR 圖像中會(huì)出現(xiàn)偽影。每次曝光時(shí),快速移動(dòng)的對象的位置(角速度)將略有不同。
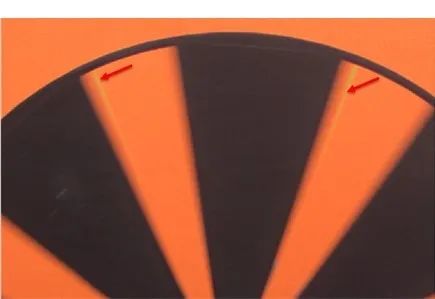

圖 7. LED 燈箱,其中兩列亮起,LED 閃爍偽影造成強(qiáng)度差異
AR0822 eHDR 包含“智能線性化”,以解決這些由多次曝光幀組合而引起的偽影。通過感測一個(gè)幀內(nèi)由不同曝光捕獲的信號(hào)電平差異,從而試圖減少通常因運(yùn)動(dòng)或 LED 閃爍造成的偽影,就有可能實(shí)現(xiàn)上述目的。




原文標(biāo)題:利用低帶寬高動(dòng)態(tài)范圍 (eHDR) 技術(shù),提高工業(yè)自動(dòng)化系統(tǒng)的精度
文章出處:【微信公眾號(hào):安森美】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
-
安森美
+關(guān)注
關(guān)注
32文章
1773瀏覽量
92840
原文標(biāo)題:利用低帶寬高動(dòng)態(tài)范圍 (eHDR) 技術(shù),提高工業(yè)自動(dòng)化系統(tǒng)的精度
文章出處:【微信號(hào):onsemi-china,微信公眾號(hào):安森美】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評(píng)論請先 登錄
工業(yè)DTU對工業(yè)自動(dòng)化通信格局的重塑






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論