 3分鐘帶您快速了解HIL測試及其架構
3分鐘帶您快速了解HIL測試及其架構
什么是HIL測試
硬件在環(HIL)仿真是一種用于測試導航系統的技術,其中測試前并不知道車輛軌跡。在這種情況下,車輛軌跡被實時饋送到GNSS模擬器。HIL可用于復雜實時系統的開發和測試,如衛星控制系統、軍事戰術導彈、飛機飛行控制和汽車系統。
而HIL測試是通常是在現場測試之前以及在環模型(MIL)、軟件在環(SIL)或處理器在環(PIL)之后的一步。HIL測試至關重要,它涉及在操作中使用的所有硬件和軟件。在整個測試流程中:
- MiL(Model-in-the-Loop)模型在環,是在PC上基于模型的測試,輸出經過驗證的控制算法模型,驗證控制算法模型是否準確地實現了功能需求。
- SiL(Software-in-the-Loop)軟件在環,是將模型生成代碼或者手工編寫代碼編譯成PC程序,在PC上進行的測試,輸出經過驗證的嵌入式代碼,在PC上驗證代碼實現的功能是否與模型一致。
- PiL(Processor-in-the-Loop)處理器在環,是將代碼編譯成目標系統程序,然后在PC上虛擬目標硬件環境并進行測試,輸出經過驗證的目標程序,在目標處理器上驗證代碼實現的功能是否與模型一致。
HIL(Hardware-in-the-Loop)硬件在環仿真測試系統是采用實時處理器運行仿真模型來模擬受控對象(比如:汽車、航空飛機等設備)的運行狀態,以此判斷電控模塊的性能。雖然這一系列的測試都有在環(in the loop)的意思,但卻不是所有被測模塊都帶有閉環。比如接收到某信號要用于車輛的車燈控制,這種情況下就不需要閉環,但如果在自動駕駛HIL測試中,想使用GNSS模擬器測試汽車運行是否正常,就需要把自動駕駛儀的信息返回到GNSS模擬器中,再進行下一個軌跡的模擬。
在HIL測試中,一般根據它在環的深度分為幾個層級:
- ECU級:也可以稱之為信號級,僅ECU軟硬件采用實物,閉環回路的其他組成部分均采用虛擬仿真系統;
- EPP級:也可以稱之為驅動級,EPP是Electrical Power Package的縮寫, ECU及執行組件采用實物,閉環回路的其他組成部分采用虛擬仿真系統;
- System級:也可以稱之為機械級,系統組件采用實物,閉環回路其他組成部分采用虛擬仿真系統。
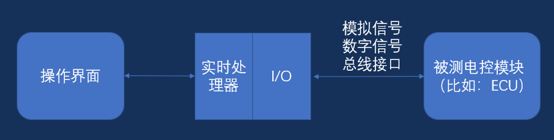
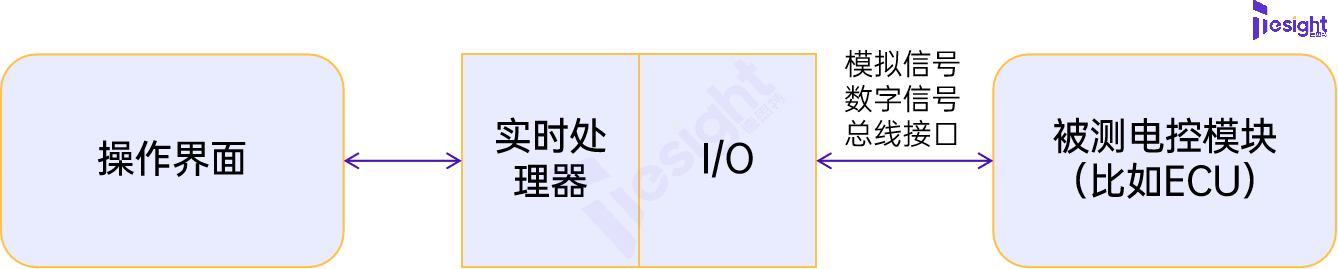
總的來說,HIL測試系統主要由三個基本部分組成,分別是實時處理器、I/O接口和可視化的操作界面,其中實時處理器是整個HIL測試系統的核心部分。實時處理器運行場景,發送信號,被測電控模塊收到后對受控對象做出相應的控制,以此判斷電控模塊的性能。通過I/O接口與被測的ECU連接,對被測系統進行全方面的、系統的測試。
HIL測試系統具有很多優勢,如安全性較高。汽車HIL中,在實車測試之前,以HIL的形式先對控制器做一個全面的功能測試。因為該被控對象是虛擬的,所以HIL比實車測試更加安全高效,而且可以測試一些實車測試中不容易實現的極端情況。此外,HIL測試系統具有豐富的測試功能,以及可以實現測試平臺的復用性等,極大的節省了時間和經濟成本。
基本架構
在HIL測試中,GNSS接收器通常不作為獨立設備進行測試,而是與其他仿真器、設備和傳感器進行集成,根據HIL架構類比可得到測試系統基本架構。
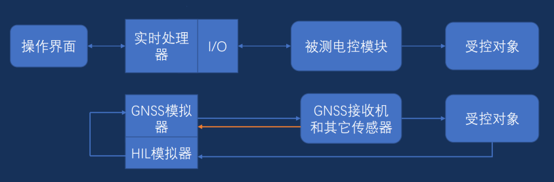
GNSS模擬器的軟件相當于操作界面,而由于虹科Safran GNSS模擬器特殊的軟件定義架構,它不僅僅是用于提供測試命令、可視化的界面以及性能分析及報告整理等功能的操作界面,還是創建測試場景、信號模擬、生成IQ文件的驅動程序,為GNSS模擬器的硬件提供IQ數據。
GNSS模擬器的硬件部分,相當于HIL中的實時處理器,它接受IQ數據,仿真出模擬的GNSS信號。大多數能獲取位置信息的設備都內置了GNSS接收模塊,被測的ECU模塊會像處理真實信號那樣處理GNSS模擬器發送的信號,然后作用于仿真模型。
在定位和導航系統的驗證中,有兩種類型的 HIL 架構:開環HIL和閉環HIL。
開環HIL架構:
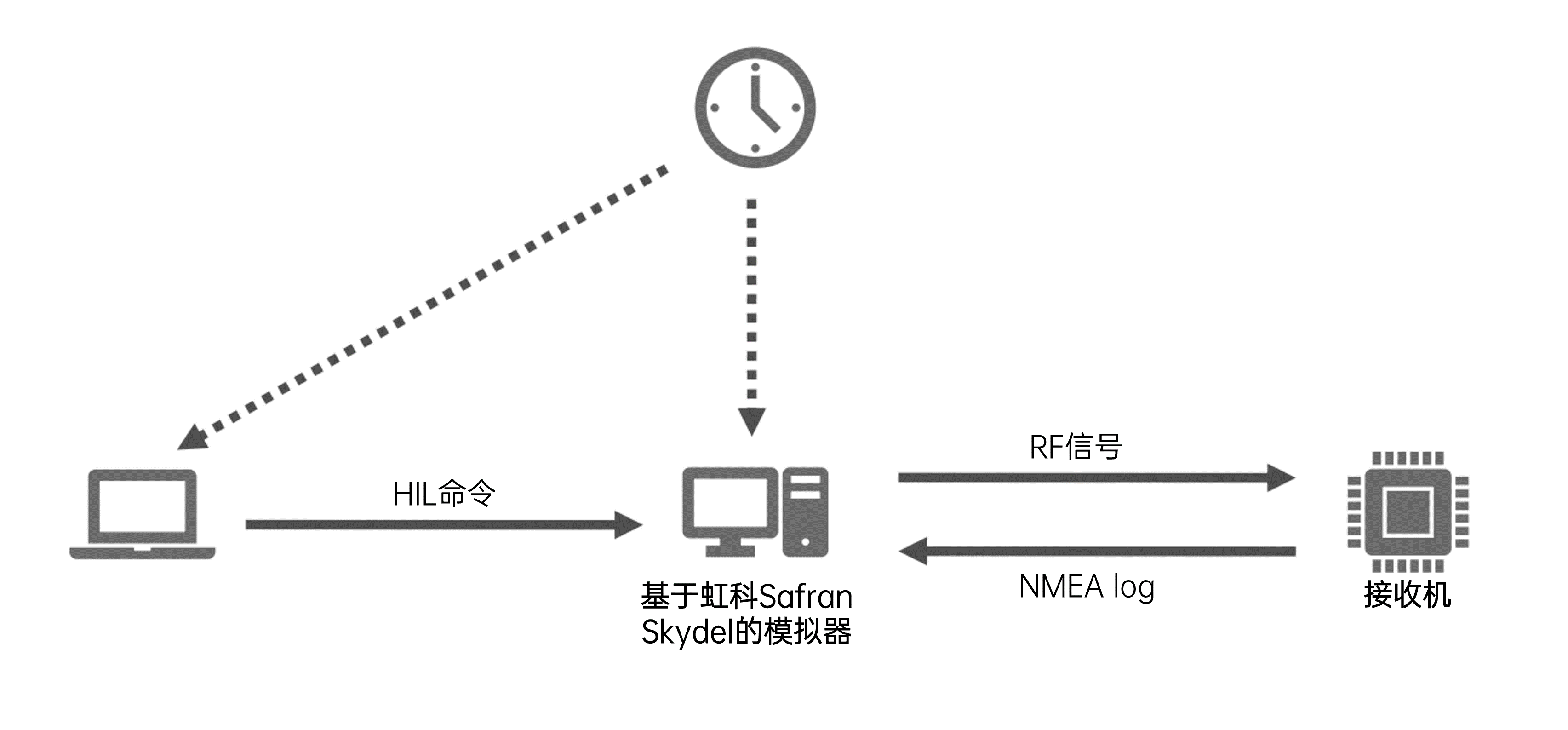
GNSS模擬器模擬生成HIL中需要的信號并作用于接收機,同時接收機的信息也會以NMEA文件的形式回傳到GNSS模擬器中,即可以得到接收的信號和模擬信號的偏差。在這種架構中,GNSS接收機(和一般傳感器)的輸出不用于控制車輛的軌跡,它是由用戶強加的,不一定具有確定性。
閉環HIL架構:
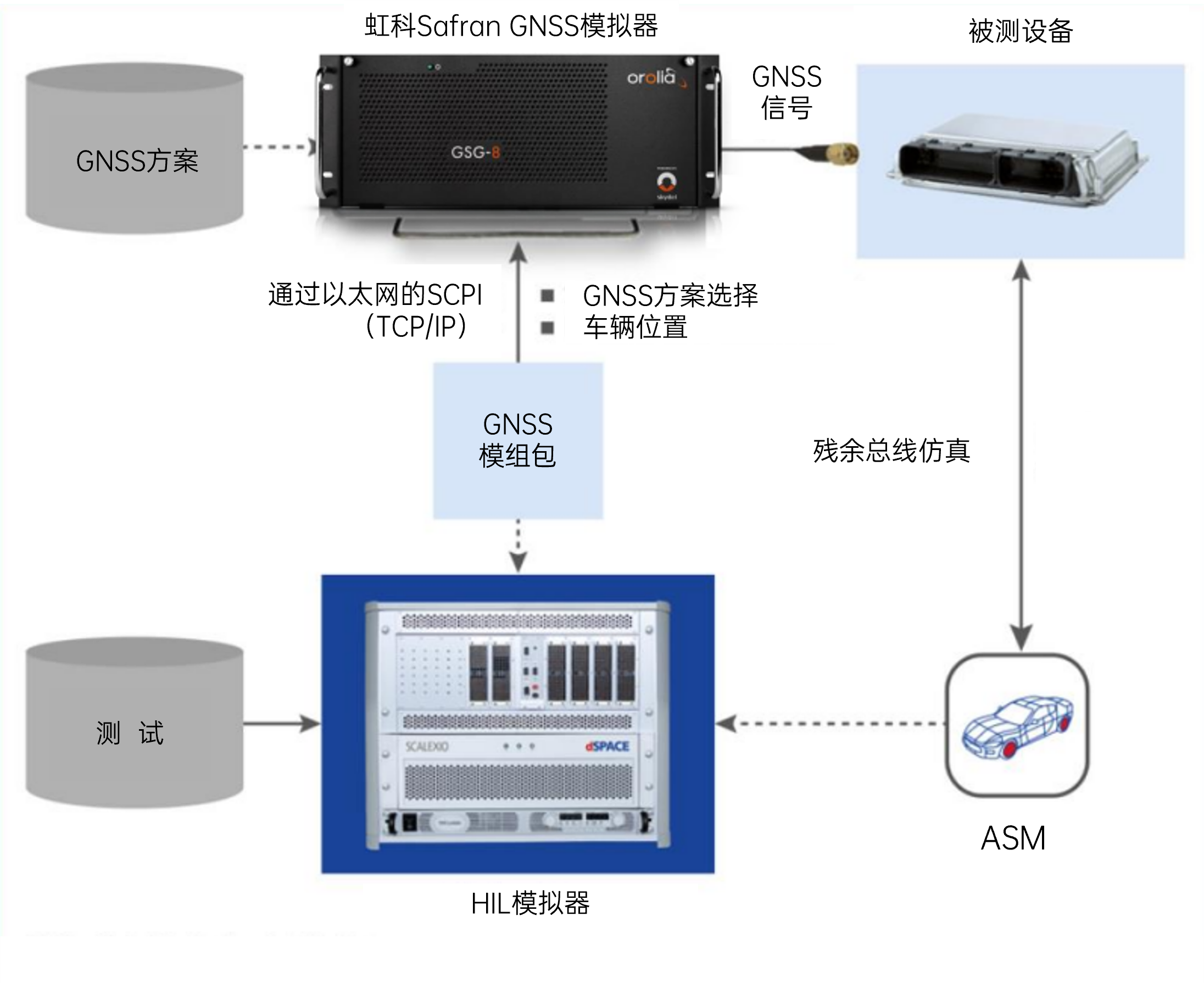
包括HIL模擬器、GNSS模擬器、GNSS接收機以及控制部分:
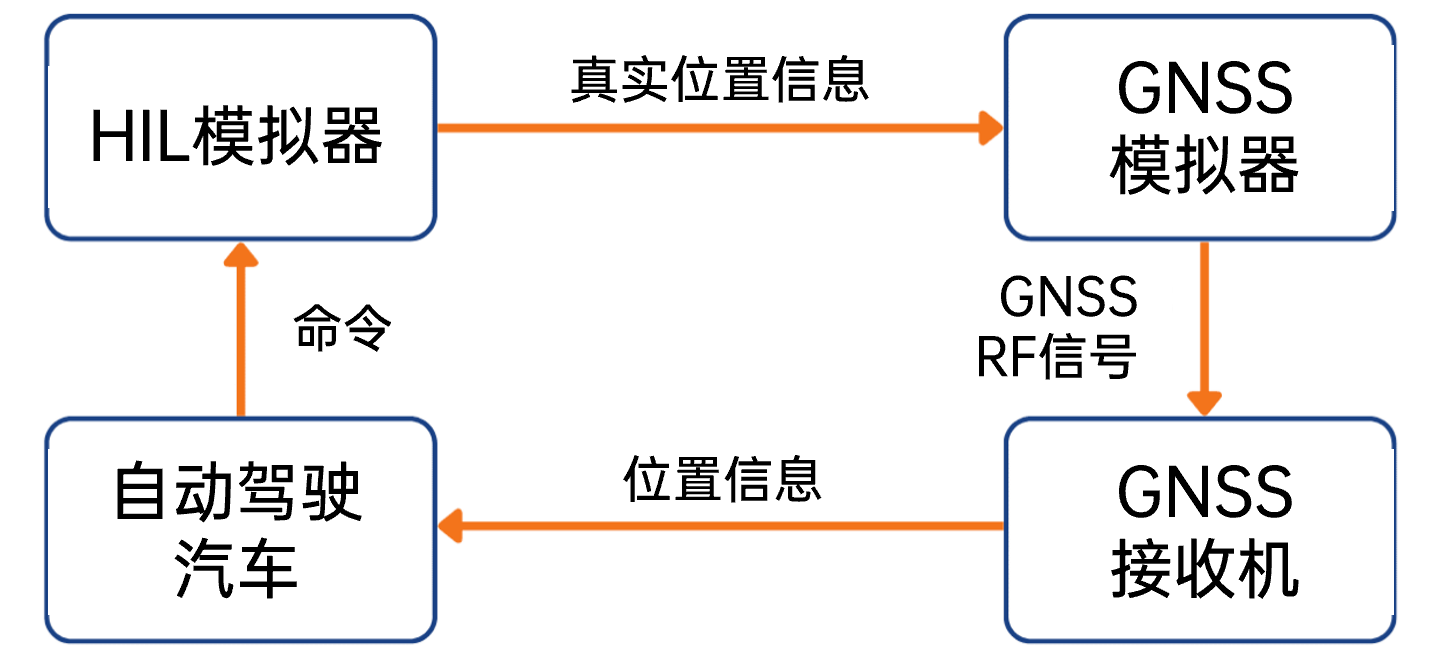
在這種架構中,GNSS接收機(以及一般的傳感器)的輸出用于導航算法,該算法更新控制車輛的執行器,執行器的輸出發送車輛位置到GNSS模擬器,GNSS模擬器根據位置信息進行信號模擬并作用于GNSS接收機,形成閉環。但是要注意,在這種情況下,GNSS接收機計算的位置直接影響模擬軌跡,從而影響廣播到GNSS接收器的RF信號。
測試方案
在閉環架構中,虹科Safran軟件定義架構的GNSS模擬器提出了自動駕駛的HIL測試方案。自動駕駛中車輛的真實位置是隨著場景的進展而確定并實時反饋給模擬器。
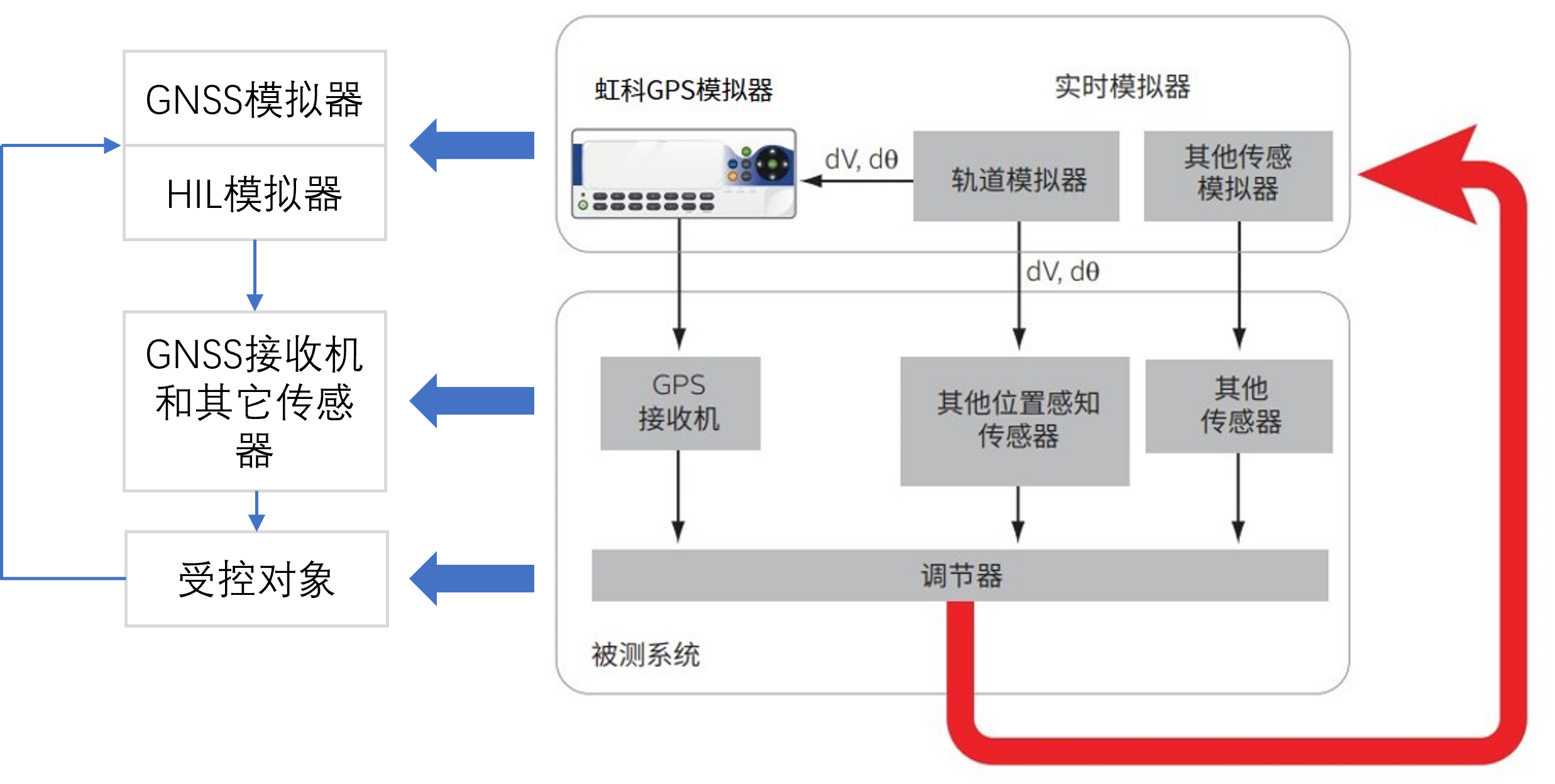
首先實時處理器部分和架構一樣,GNSS模擬器和HIL模擬器都屬于實時處理器部分,模擬器分別把模擬器信號發送給相應的傳感器和接收機,經過處理計算后,再控制調節器。調節器的信息又反饋給模擬器進行計算模擬。
虹科Safran GNSS模擬器支持通過位置、速度、加速度和方向命令集成6自由度軌跡的固定延遲流,來將實際GNSS射頻信號集成到HIL系統中,車輛的方向及其變化以及衛星功率水平也可以通過實時命令進行控制。
虹科Safran Skydel支持在任何地點使用,可以模擬所有星座、所有頻率的所有可見衛星,具有1000Hz的迭代率和超高的動態,隨時隨地創建并更新場景。高級干擾和欺騙功能允許用戶同時模擬多種威脅,自動確定每個信號之間的信號動態,節省時間成本,并能夠使用Python、C#和C++的開源客戶端庫構建復雜、復雜和可重復的場景。
- 在一個用戶界面中實現所有功能
- 通過直觀的UI和自動化輕松配置
- 支持所有主要的全球星座和頻率
- 多種API(Python、C#、C++、LabVIEW)
- 高級信號定制和場景創建
- 實時修改變量和參數
- 無需額外硬件即可集成干擾
- IQ文件生成和回放
目前,自動駕駛HIL測試中為了還原更加真實的場景,要求GNSS模擬器和其它傳感模擬器發送到被測系統的信號同時到達,并且在其它模擬器分析計算好真實位置信息發送到GNSS模擬器后,需要能夠及時的進行GNSS信號的模擬,更好的保證它的實時性。這兩個要求讓自動駕駛HIL測試面臨著兩個問題,那就是同步和時延的問題。
對于同步,需要考慮:
- 如何處理HIL測試的同步化和時鐘系統?
- HIL模擬器和虹科Safran Skydel GNSS模擬器能否使用一個共同的時鐘源?
對于時延:
- 從HIL模擬器的輸入(自動駕駛儀命令)和GNSS模擬器的輸出(GNSS射頻信號)如何使他們的延遲最小化,以保證模擬的實時性呢?
在下期文章中我們將繼續討論如何解決這兩個問題。
-
射頻
+關注
關注
106文章
5729瀏覽量
169782 -
通信
+關注
關注
18文章
6177瀏覽量
137386 -
無線通信
+關注
關注
58文章
4712瀏覽量
144864 -
GNSS
+關注
關注
9文章
844瀏覽量
49064 -
汽車
+關注
關注
14文章
3801瀏覽量
39245
發布評論請先 登錄
軟件定義架構如何滿足GNSS模擬測試的開放性需求?

BMS HIL測試技術演進:高壓架構、多域融合與儲能系統應用解析
1分鐘學會T113-i核心板串口調試技巧

電力電子半實物仿真(HIL)原理及應用

底盤電控系統HIL仿真測試解決方案

智能駕駛HIL仿真測試解決方案



汽車HiL測試:利用TS-GNSS模擬器掌握硬件性能的仿真藝術
基于V2X和自動駕駛HIL聯調的仿真測試系統開發

智駕仿真測試實戰之自動泊車HiL仿真測試

【干貨分享】硬件在環仿真(HiL)測試

防水測試儀的標準設置

直流電阻快速測試儀操作方法——每日了解電力知識





 工商網監
工商網監
評論