") 【解決方案】電機(jī)制氧-如何讓電機(jī)制氧又穩(wěn)又安靜?
【解決方案】電機(jī)制氧-如何讓電機(jī)制氧又穩(wěn)又安靜?
便攜式制氧機(jī)使用微型電機(jī)就可制氧!本文將剖析ADRC取代PID控制電機(jī),讓便攜制氧機(jī)更平穩(wěn)更安靜。便攜制氧機(jī),因?yàn)橐S時(shí)攜帶,所以需要微型壓縮機(jī)的速度穩(wěn)定、噪聲低、能效高。傳統(tǒng)的PID算法用在微型壓縮機(jī)上速度波動(dòng)較大、效果一般,而ADRC算法能大幅提升性能。
 便攜制氧機(jī)
便攜制氧機(jī)
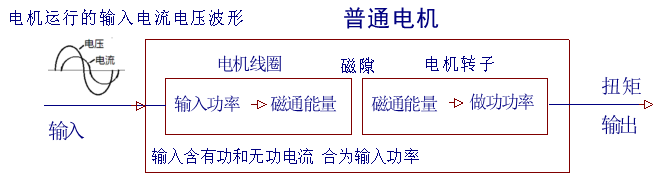
便攜制氧機(jī)是在傳統(tǒng)插電制氧機(jī)的基礎(chǔ)上進(jìn)行小型化。主要將傳統(tǒng)的基于交流異步電機(jī)的壓縮機(jī),改為基于直流無(wú)刷電機(jī)的微型壓縮機(jī),工作電壓在12~24V,并且使用鋰電池供電,小小一個(gè)背包在身,一般可以連續(xù)4個(gè)小時(shí)以上供氧。具體工作原理請(qǐng)看上一篇推文:《電機(jī)制氧-剖析便攜制氧機(jī)的工作原理》。
PID的原理與特點(diǎn)
PID算法是在1936年完整提出的,它是一種在自動(dòng)控制技術(shù)中占有非常重要地位的控制方法。PID控制理論從誕生之日就和電機(jī)深深捆綁在一起,時(shí)至今日,有電機(jī)的地方,一般背后就有PID的身影,例如空調(diào)、無(wú)人機(jī)、機(jī)器人等等。
一、PID的原理下圖是直流電機(jī)的PID調(diào)速系統(tǒng)。No(t)是期望得到的電機(jī)目標(biāo)速度,N(t)是電機(jī)實(shí)際的速度,U(t)是PID控制器的輸出電壓。No(t)與N(t)相比較,得出的誤差值E(t)=No(t)-N(t),經(jīng)PID控制器計(jì)算后輸出控制電壓U(t),驅(qū)動(dòng)電機(jī)改變速度。當(dāng)實(shí)際速度偏小時(shí),即No(t)> N(t),E(t)>0,PID控制器加大U(t)輸出,電機(jī)實(shí)際速度將提高;當(dāng)實(shí)際速度偏大時(shí),即No(t)
二、PID的特點(diǎn)
PID控制器中有三個(gè)單元,它們的作用和特點(diǎn)分別是:
- P:Proportion比例,它的作用是放大誤差E(t),E(t)越大輸出電壓U(t)越大,速度越快被修正回來(lái),但如果誤差E(t)太大,輸出電壓U(t)就可能過(guò)大、速度會(huì)超調(diào)(跑多了)。
I:Integral積分,它的作用是將一段時(shí)間內(nèi)的誤差E(t)累加起來(lái),累加的值越大,輸出電壓U(t)越大,也就是如果速度長(zhǎng)時(shí)間只存在一點(diǎn)點(diǎn)誤差,P比例單元不好控制,等一段時(shí)間后,I積分輸出足夠大的電壓,速度才被修正過(guò)來(lái),這會(huì)有延時(shí)。
D:Differential微分,它的作用是將當(dāng)前的誤差E(t)和上一次的誤差E(t-1)相比較,如果E(t)更大,誤差就有越來(lái)越大的趨勢(shì),就增大電壓U(t)將速度預(yù)先修正。
關(guān)于PID深入原理,有興趣的讀者可查閱小編編寫(xiě)的《車(chē)用電機(jī)控制與實(shí)踐》一書(shū)。
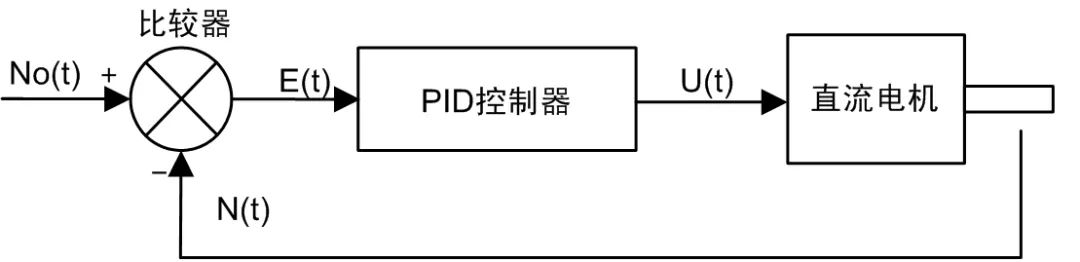
圖1 PID調(diào)速原理
PID是否有“事后諸葛亮”的感覺(jué)?P、I、D中每個(gè)單元都要等誤差出現(xiàn)才做事,沒(méi)誤差就不做事,誤差大就調(diào)整大,誤差小就調(diào)整小。這會(huì)導(dǎo)致控制反應(yīng)慢。
ADRC原理與特點(diǎn)
一、ADRC的原理
干擾,或者稱擾動(dòng),是指系統(tǒng)外部的環(huán)境出現(xiàn)變化,或者系統(tǒng)內(nèi)部特性改變,最終影響了系統(tǒng)的性能。例如上面提到的無(wú)人機(jī)的螺旋槳,空氣阻力隨轉(zhuǎn)速變化,影響電機(jī)速度的穩(wěn)定性,這個(gè)是外部擾動(dòng);當(dāng)電機(jī)長(zhǎng)時(shí)間運(yùn)行后,溫度明顯上升,銅線圈的電阻值升高,原來(lái)預(yù)估的給多少V電壓就得到多少A電流的關(guān)系不存在了,這是內(nèi)部擾動(dòng)。如何實(shí)現(xiàn)快速抗擾動(dòng)的效果,一直是自控工程中最核心的研究工作。自抗擾控制(ADRC)技術(shù)是已故韓京清研究員借鑒經(jīng)典PID控制理論,在1999年正式系統(tǒng)地提出來(lái)的,并發(fā)表了《自抗擾控制技術(shù)》一書(shū)。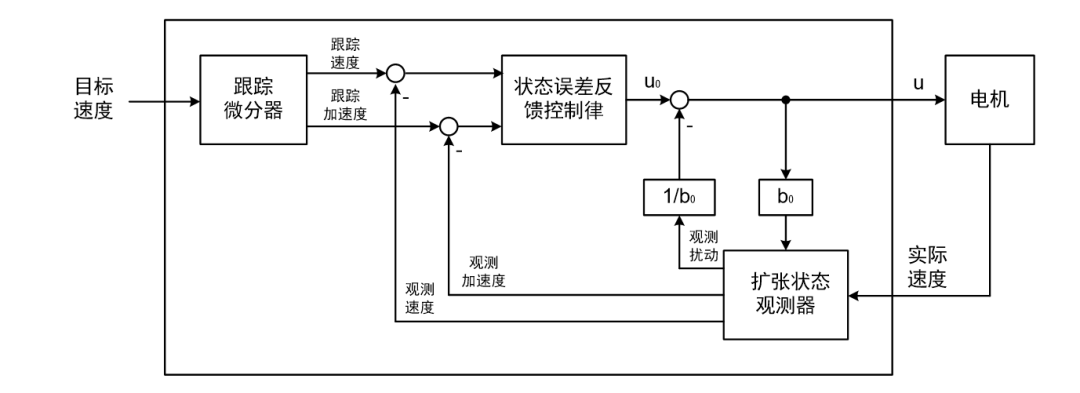 圖2 ADRC控制框圖ADRC的典型控制框圖如上圖,它主要包含跟蹤微分器、狀態(tài)誤差反饋控制律和擴(kuò)張狀態(tài)觀測(cè)器三大部分組成。
圖2 ADRC控制框圖ADRC的典型控制框圖如上圖,它主要包含跟蹤微分器、狀態(tài)誤差反饋控制律和擴(kuò)張狀態(tài)觀測(cè)器三大部分組成。
跟蹤微分器
- 不單要跟蹤用戶給定的目標(biāo)速度,還要跟蹤它的變化趨勢(shì),即加速度,例如目標(biāo)速度瞬間增大,不能像PID那樣等到速度有誤差產(chǎn)生了,才讓D去算差多少、怎樣做,跟蹤微分器實(shí)時(shí)跟蹤著加速度,讓后面的環(huán)節(jié)立刻跟上。
狀態(tài)誤差反饋控制律
- 和PID控制器相當(dāng),也是根據(jù)誤差輸出的,只不過(guò)它不僅要控制速度誤差(跟蹤速度-觀測(cè)速度),還要控制加速度(跟蹤加速度–觀測(cè)加速度),最終讓這兩個(gè)誤差同時(shí)為零。狀態(tài)誤差反饋控制律的做法有很多選擇,可繁可簡(jiǎn),對(duì)于電機(jī)控制,一般使用PID的“P”比例和“D”微分就有不錯(cuò)的效果;P負(fù)責(zé)控制速度,讓“跟蹤速度”和“觀察速度”相等;D 負(fù)責(zé)控制加速度,讓“跟蹤加速度”和“觀察加速度”相等。
擴(kuò)張狀態(tài)觀測(cè)器
- 這是ADRC的“靈魂”所在,一方面根據(jù)實(shí)際速度,觀測(cè)出觀測(cè)速度(理想時(shí)等于實(shí)際速度)和觀測(cè)加速度,參與到狀態(tài)誤差反饋控制律的速度和加速度的調(diào)節(jié);另一方面根據(jù)實(shí)際速度和控制電壓U,估算出觀測(cè)擾動(dòng),例如多少電壓、速度就應(yīng)該多少,這是已知的,如果不是這樣,也就意味著有干擾,觀察擾動(dòng)就疊加到Uo上,調(diào)整最終給電機(jī)的電壓U,讓速度調(diào)整過(guò)來(lái),其中bo和1/bo是根據(jù)驅(qū)動(dòng)器調(diào)節(jié)好的比例參數(shù)。有了擴(kuò)張狀態(tài)觀測(cè)器這個(gè)“自抗擾”的功能,就無(wú)需像PID那樣“躺平”,有誤差來(lái)才做事。
二、ADRC的特點(diǎn)
1. 速度穩(wěn)定
無(wú)油空氣壓縮機(jī)的工作過(guò)程就是要來(lái)回壓縮、排氣,電機(jī)在壓縮空氣時(shí)遇到的阻力極大,而排氣時(shí)阻力幾乎為零。如果FOC采用PID算法控制速度,在這種情況下速度無(wú)法很好地穩(wěn)定,而ADRC依靠擴(kuò)張狀態(tài)觀測(cè)器,觀測(cè)出擾動(dòng)(阻力變化)后自動(dòng)補(bǔ)償,速度波動(dòng)可以減低5~10倍。如下圖,12V無(wú)油空氣壓縮機(jī),同樣工作在1000RPM(轉(zhuǎn)/分), PID調(diào)速的速度波動(dòng)在40~50RPM,而ADRC在3~5RPM。采用ADRC的便攜制氧機(jī),工作時(shí)的震動(dòng)更小、噪聲更低。
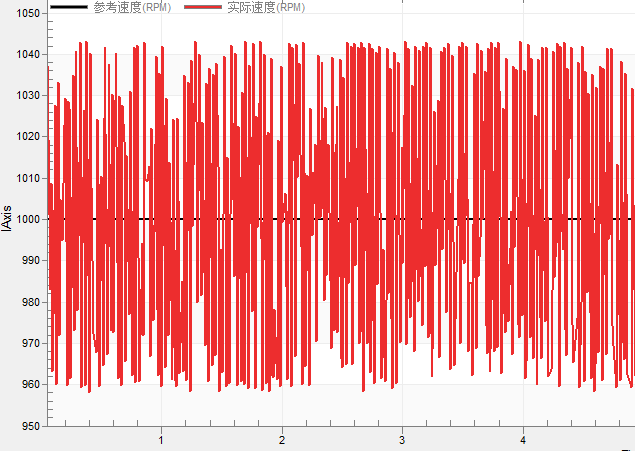
圖3PID速度波動(dòng)
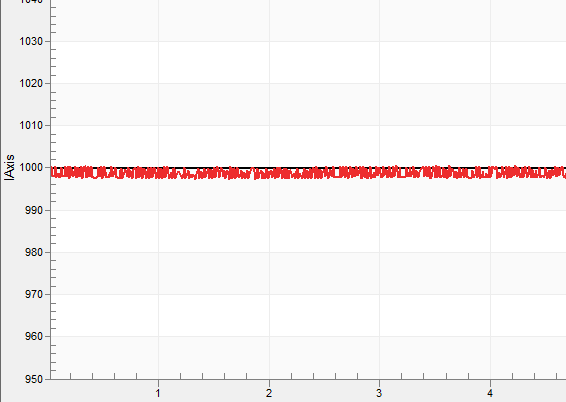
圖4ADRC速度波動(dòng)
2. 完美加減速
PID由于調(diào)節(jié)速度時(shí)“需要速度誤差”,所以在加速或減速過(guò)程中,往往會(huì)“跑過(guò)頭”,之后才“發(fā)現(xiàn)錯(cuò)誤”修正回來(lái),這個(gè)現(xiàn)象稱為超調(diào),并且在加速、減速的過(guò)程中,實(shí)際速度往往無(wú)法完全跟隨參考速度,這個(gè)時(shí)候需要更大的電流去調(diào)節(jié)。ADRC首先依靠擴(kuò)張狀態(tài)觀測(cè)器修正誤差,然后跟蹤微分器跟蹤著加減速,最后采用工業(yè)的S形加減速控制,讓實(shí)際速度和參考速度幾乎完全重合,需要的電流也更小。下面是24V醫(yī)療風(fēng)機(jī)的對(duì)比圖,因?yàn)镻ID在加速和減速時(shí),實(shí)際速度無(wú)法跟上參考速度,電源需要5A以上,而ADRC 實(shí)際速度和參考速度幾乎完全重合,電源只需3A。采用ADRC控制算法的便攜制氧機(jī)將更省電。
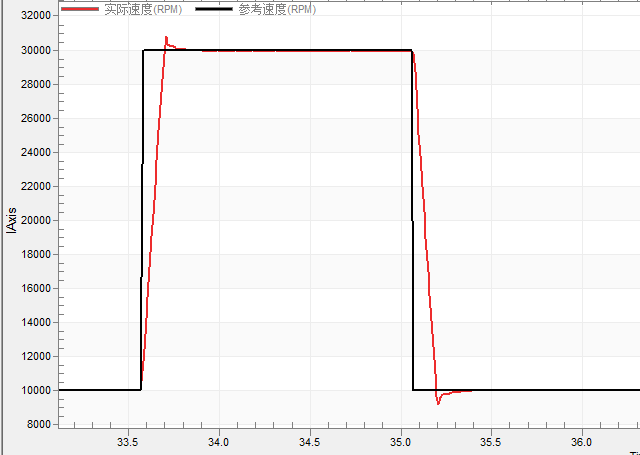
圖5PID加減速
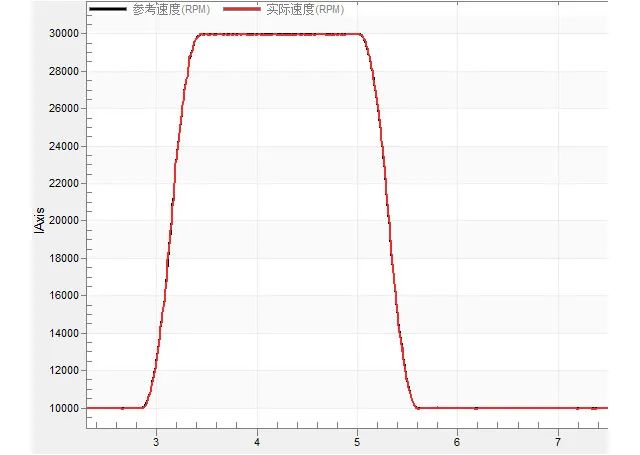
圖6ADRC加減速
?便攜制氧機(jī)驅(qū)動(dòng)板
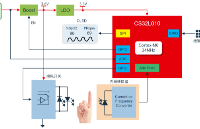
致遠(yuǎn)電子針對(duì)微型無(wú)油空氣壓縮機(jī),出品了便攜制氧機(jī)專用的無(wú)刷直流電機(jī)驅(qū)動(dòng)板,具有以下特點(diǎn):
- 優(yōu)化的算法,根據(jù)制氧機(jī)深度改進(jìn)的無(wú)感FOC算法,傳統(tǒng)無(wú)感FOC算法在此運(yùn)行會(huì)劇烈震動(dòng)、無(wú)法使用;
- 大范圍轉(zhuǎn)速無(wú)感FOC算法支持低速大扭矩,能在50~3500RPM大范圍轉(zhuǎn)速穩(wěn)定工作,制氧機(jī)能輕松實(shí)現(xiàn)多檔位選擇;其他方案一般只能在1000~3000RPM小范圍轉(zhuǎn)速下工作;
- 穩(wěn)定的轉(zhuǎn)速,ADRC算法替換傳統(tǒng)的PID算法,在1000~3000RPM滿載下,轉(zhuǎn)速波動(dòng)僅為5RPM左右;其他基于PID的FOC方案約50RPM;方波方案一般無(wú)法勻速,速度會(huì)受吸氧量的影響而波動(dòng);轉(zhuǎn)速越穩(wěn)定,震動(dòng)越小,更安靜、更省電;
- 優(yōu)化加減速,采用工業(yè)伺服的S曲線控制加減速,換擋平順、不抖動(dòng);
- 穩(wěn)定且靈活,醫(yī)療產(chǎn)品級(jí),基于高性能ARM處理器,DC12~24V/120W,1~2ms PWM脈沖輸入調(diào)速,過(guò)流、過(guò)壓、欠壓、堵轉(zhuǎn)、缺相、功率保護(hù)等等。
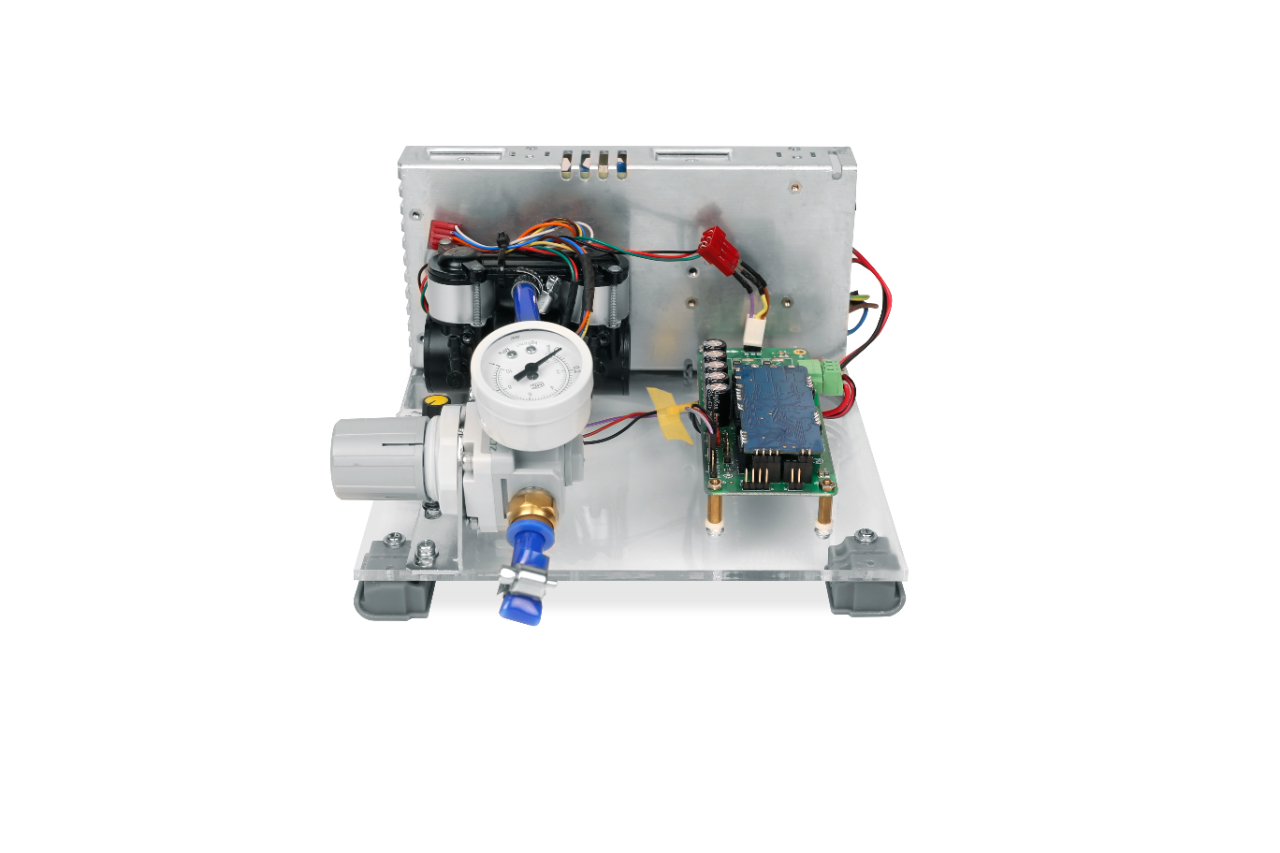 圖7便攜制氧機(jī)驅(qū)動(dòng)板演示
圖7便攜制氧機(jī)驅(qū)動(dòng)板演示
-
電機(jī)
+關(guān)注
關(guān)注
143文章
9256瀏覽量
148413
發(fā)布評(píng)論請(qǐng)先 登錄
抗干擾與穩(wěn)定性:無(wú)刷血氧儀驅(qū)動(dòng)方案的電路設(shè)計(jì)精髓 --其利天下

車(chē)載充電機(jī)(OBC)和熱泵空調(diào)等車(chē)載領(lǐng)域成為柵氧可靠性問(wèn)題的“爆雷重災(zāi)區(qū)”
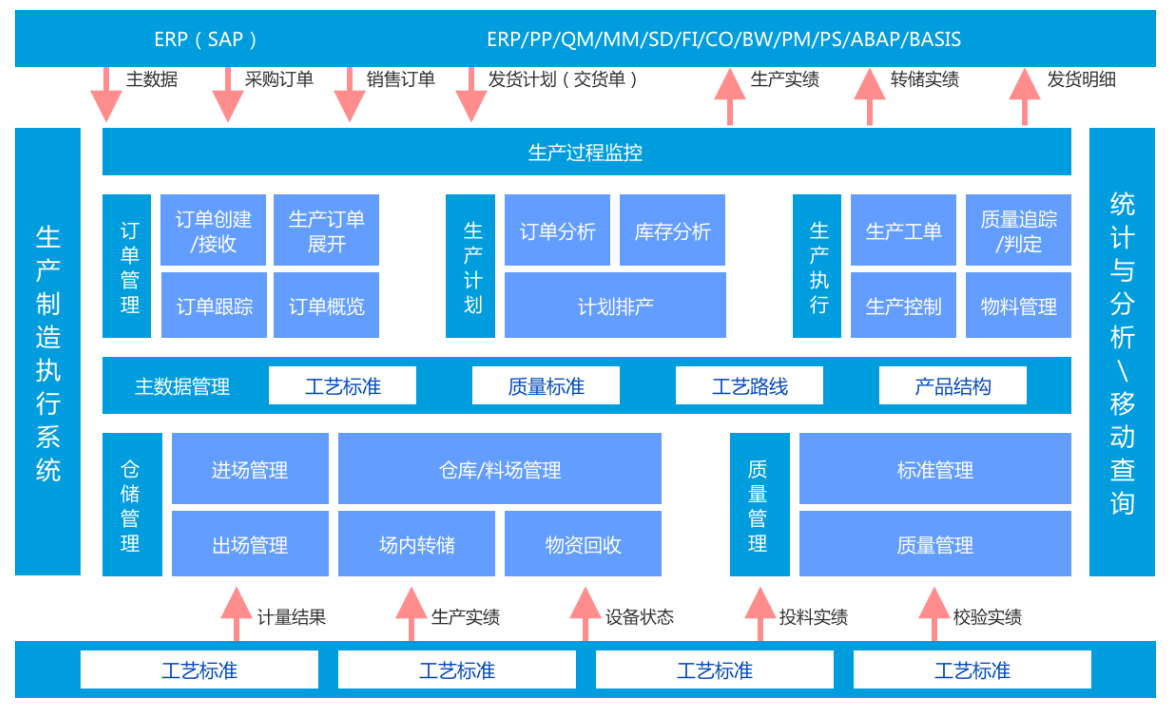
無(wú)刷電機(jī)工廠生產(chǎn)管理MES系統(tǒng)解決方案
電機(jī)行業(yè)MES系統(tǒng)功能介紹及實(shí)施方案
效率提升20%,噪音降低30%!智能風(fēng)扇的電機(jī)驅(qū)動(dòng)方案有多強(qiáng)?

電摩電機(jī)控制器解決方案
萬(wàn)界星空科技電機(jī)行業(yè)MES系統(tǒng)解決方案
曝氣增氧設(shè)備遠(yuǎn)程監(jiān)控控制物聯(lián)網(wǎng)方案
芯海科技推出高精度血氧儀應(yīng)用方案
天然氧吧負(fù)氧離子監(jiān)測(cè)設(shè)備:守護(hù)清新之源的科技精靈

智能調(diào)優(yōu),使步進(jìn)電機(jī)安靜而高效地運(yùn)行

短文5:電機(jī)的效率計(jì)算問(wèn)題
6類非屏蔽網(wǎng)線需要含多少無(wú)氧銅
電機(jī)工廠MES系統(tǒng)解決方案





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論