") 這款三維空間導航模塊,為您的巡檢機器人賦能
這款三維空間導航模塊,為您的巡檢機器人賦能
多傳感器、高精度、多接口的定位導航模塊是智司為了賦予各類機器人在各種地形中定位、導航、避障等能力而研發(fā)生產(chǎn)的產(chǎn)品,現(xiàn)已運用在室外機器人巡檢、機器人環(huán)境感知、多機器人協(xié)同等場景。
產(chǎn)品特點
適配任意底盤,通用性強
無論哪一款機器人底盤,無論是人形還是機械狗,無論是輪式還是履帶,無論是否是機器人,都能夠使用這款導航模塊。
小小身體,大大能量
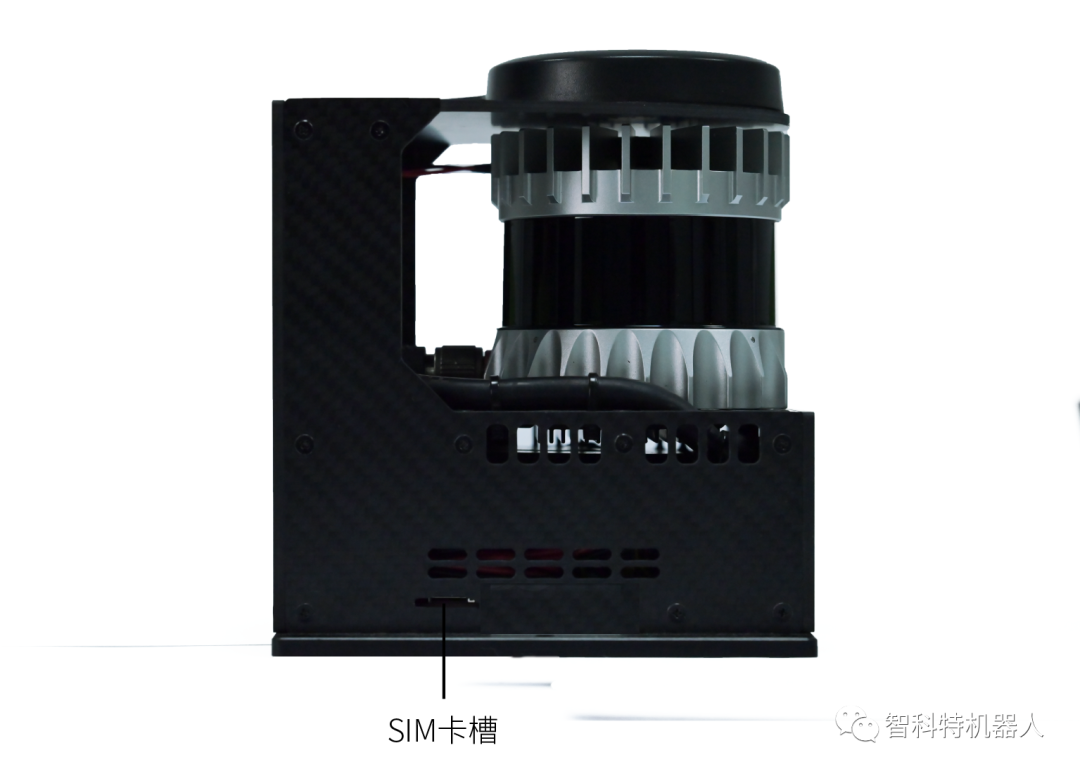
整個模塊只有巴掌大小,包含了機器人大腦與各類傳感器,單一模塊能夠完成自主測控、處理信息、定位導航等任務。
獨立模塊,即插即用
有手即可安裝,不需調試即可使用,產(chǎn)品軟硬件完成度極高,讓你快速深入自己的研究任務中。


參數(shù)表
| 智科特導航模塊 | |
| 激光雷達 | Ouster OS0-32 |
| 范圍:0.3-50m | |
| 精度:0.3 - 1 mL:±2 cm,1 - 10 m:±1 cm;10 - 15 m:±1.5 cm;>15 m:± 5 cm | |
| 水平視角:360° /垂直視角:±45° | |
| 測距:0.3cm | |
| 垂直分辨率:2.8°(32線),水平分辨率:0.35°(1024線) | |
| 激光等級:Class 1 人眼安全,符合 IEC/EN 60825-1: 2014 | |
| IMU | 型號:InvenSense ICM-20948 |
| 3軸陀螺儀,三軸加速度計 | |
| 最大量程±8g,±1000°/s | |
| 單目相機 | 視場角:110° |
| 分辨率:1280X730 | |
| 幀率:30FPS | |
| 機載計算機 | Intel NUC i5 Gen11 |
| 外部端口 | HDMI,USB3.0,RJ-45網(wǎng)口 |
| 操作系統(tǒng) | Ubuntu 20.04 |
| 全局定位系統(tǒng) | GPS:L1,L2;BEIDOU:B1,B2;GLONASS:G1,G2;Galileo:E1,E5 |
| 差分定位精度:平面<2CM、高程<5CM | |
| 輸出頻率:10Hz | |
| 重量 | 1.5KG |
| 操作溫度 | 0°-50° |
| 電源 | 外置電池包,直流供電 |
| 電池工作時間 | 3小時 |
| 掛載方式 | 手持,機載 |
| 建圖頻率 | 10Hz |
| 輸出格式 | .pcd(3D) |
| 后期處理 | 地面校正,平面校正,全局閉環(huán)檢測,地圖拼接,離線地圖優(yōu)化 |
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權轉載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
機器人
+關注
關注
213文章
29508瀏覽量
211627
發(fā)布評論請先 登錄
相關推薦
熱點推薦
詳細介紹機場智能指路機器人的工作原理
機場智能指路機器人主要依靠感知系統(tǒng)、定位系統(tǒng)、導航系統(tǒng)、智能交互系統(tǒng)和運動系統(tǒng)協(xié)同工作,來實現(xiàn)為旅客準確指路和提供服務的功能,以下是其詳細工作原理:
感知系統(tǒng)
傳感器類型 :機器人配備了多種傳感器
發(fā)表于 05-10 18:26
復合機器人是通過什么導航方式?
+AI動態(tài)決策”的三維導航體系,重新定義了復合機器人的移動邏輯,讓“精準、靈活、智能”成為智能工廠的標配。
一種基于基礎模型對齊的自監(jiān)督三維空間理解方法
三維空間理解是推動自動駕駛、具身智能等領域中智能系統(tǒng)實現(xiàn)環(huán)境感知、交互的核心任務,其中3D語義占據(jù)預測 (Semantic Occupancy Prediction) 對三維場景進行精準的體素級建模。然而,當前主流方法嚴重依賴大規(guī)模標注數(shù)據(jù),制約了模型的可擴展性和泛化能力
四足巡檢機器人特點和作用是什么
,工作人員因空間限制難以躲避,傷亡風險極高。而四足巡檢機器人以其獨特魅力闖入人們視野。它巧妙模仿動物身體結構,擁有四條靈活的“腿”,在很多場景替代了人工巡檢。 一、四足

三維測量數(shù)據(jù)處理流程
一系列的處理步驟才能轉化為有用的信息。 1. 數(shù)據(jù)采集 三維測量數(shù)據(jù)處理的第一步是數(shù)據(jù)采集。這一步驟涉及到使用各種傳感器和設備來獲取三維空間中的點云數(shù)據(jù)。常見的設備包括: 激光掃描儀(LiDAR) 立體攝影測量設備 遙感衛(wèi)星
嵌入式學習-飛凌嵌入式ElfBoard ELF 1板卡-運動追蹤之六軸傳感器使用場景
六軸傳感器主要適用于需要測量和監(jiān)控物體在三維空間中的運動、速度、方向和姿態(tài)的場景。應用場景非常廣泛,涵蓋了許多不同的領域和行業(yè)。具體的應用包括但不限于:1.機器人控制:六軸傳感器可以被安裝在機器人
發(fā)表于 12-02 09:47
飛凌嵌入式ElfBoard ELF 1板卡-運動追蹤之六軸傳感器使用場景
六軸傳感器主要適用于需要測量和監(jiān)控物體在三維空間中的運動、速度、方向和姿態(tài)的場景。應用場景非常廣泛,涵蓋了許多不同的領域和行業(yè)。具體的應用包括但不限于:1.機器人控制:六軸傳感器可以被安裝在機器人
發(fā)表于 11-29 08:57
隧道智能巡檢機器人 爬坡 轉彎 IP65防護 賦能隧道管理
隧道智能巡檢機器人|爬坡|轉彎|?IP65防護|賦能隧道管理 隧道確實是極其難以巡檢的地方,這主要源于其特殊的地理位置和復雜的內部環(huán)境。隧道
三維觸摸面板-運用觸感功能
。
醫(yī)療領域 :
醫(yī)療設備 :在醫(yī)療診斷設備、手術機器人等醫(yī)療設備中,三維觸摸面板可以用于操作和控制設備的各種功能。醫(yī)生可以通過觸摸和按壓面板來調整設備的參數(shù)、查看患者的信息等,提高醫(yī)療操作的準確性
發(fā)表于 09-18 13:55
B3-111-A 小型掛軌式巡檢機器人:精準巡檢,高效運維
在現(xiàn)代工業(yè)自動化與智能化的浪潮中,巡檢機器人的應用日益廣泛,為各類復雜環(huán)境下的設備巡檢與運維提供了強有力的支持。杭州旗晟智能科技有限公司推出

安防巡檢機器人:守護安全的智能衛(wèi)士
安防巡檢機器人,作為機器人技術在安防領域的杰出應用,是一種集自主導航、智能巡檢、環(huán)境監(jiān)測、遠程監(jiān)控等多功能于一體的智能裝備。這些

三維可視化的魅力與應用
三維可視化是一種強大的工具,它融合了藝術、科學和技術,通過在三維空間中呈現(xiàn)數(shù)據(jù)、概念和想法,為人們提供了一種直觀而生動的方式來理解和探索信息。這項技術在當今世界中的應用非常廣泛,涵蓋了科學、教育
以機代人 機器人搭載圖像處理板實現(xiàn)變電站高效巡檢
機器人是AI落地應用的一個很重要載體,AI賦能的機器人能夠在安防巡檢、自動化作業(yè)、應急救援等領域發(fā)揮重要作用。在電力

6軸傳感器的工作原理及應用領域
隨著科技的不斷進步,6軸傳感器在現(xiàn)代機器人技術、航空航天、汽車工程等領域的應用越來越廣泛。它能夠提供三維空間中的線性加速度和角速度信息,為各種精密控制和導航提供關鍵數(shù)據(jù)。 一、6軸傳感

三維可視化系統(tǒng)平臺介紹及優(yōu)勢
三維可視化 系統(tǒng)平臺是一種基于三維技術開發(fā)的軟件系統(tǒng),主要用于實現(xiàn)對三維空間中數(shù)據(jù)、模型、場景等內容的可視化展示和操作。這樣的系統(tǒng)平臺在各個領域都具有廣泛的應用,包括但不限于建筑設計、工程建設






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論