 干貨 | 虹科KPA MoDK運行環境與搭建步驟(3)——MoDK例程測試
干貨 | 虹科KPA MoDK運行環境與搭建步驟(3)——MoDK例程測試
“虹科”工業自動化
本系列文章旨在幫助讀者對虹科KPA Automation體系進行一個簡要的理解,并且能使用MoDK進行快速的上手操作,包括:虹科KPA Automation、虹科KPA MoDK簡介,虹科KPA MoDK的運行環境搭建與例程測試。本文檔搭建的虹科KPA MoDK運行環境,是基于Win10,并且是以C/C++為開發語言進行的。
本篇推文將展示部分官方例程的測試。以下例程分別對應了MoDK可以控制的3類對象:EtherCAT從站(結合MDK)、Vrep機器人仿真平臺、Simulation(純文字仿真)。最后一個例程通過Motion Configuration Utility中的設置,實現了對實際電機以及Vrep中仿真機器人的同時控制。
溫故知新
點擊以下鏈接可回顧前文內容
? 虹科KPA MoDK運行環境與搭建步驟(1)——運行環境簡介
? 虹科KPA MoDK運行環境與搭建步驟(2)——MoDK運行環境搭建
1. Move_relative (EtherCAT & CiA402)
該例程的測試效果是控制一個物理電機軸進行3次相關運動,需要我們外接一個EtherCAT從站伺服和電機進行現象觀察,筆者的測試環境中,選擇的是maxsine的伺服。
 ?
?例程測試的步驟如下:
在虹科KPA Studio中進行網絡組態
打開虹科KPA Studio,導入maxsine伺服ESI文件。當虹科KPA MRT安裝完畢后,可用作本地EtherCAT Master與Studio進行連接。將maxsine伺服拖動至Master的位置,即實現了從站的掛載,也完成了網絡組態。
進行軸的配置,并導出配置文件
接下來在Motion Configuration Utility中將軸與伺服電機進行對接,并導出網絡組態與軸配置文件,然后進行電機軸與伺服的綁定,并導出相關文件。
修改程序源代碼的部分參數
例程通過讀取網絡配置文件和軸配置文件進行MoDK運行環境的初始化,其讀取的文件名是通過宏進行設定的。可以通過修改宏來適應文件名。另外,我們還需要修改ecatm虹科KPA15_helper.c中的選用網卡編號,使得本地Master能夠通過正確的網卡進行從站伺服的控制。
以上配置完成后,點擊“ctrl+F5”,即可運行程序觀察現象。
2. Move_path (Vrep)
該例程不僅體現了虹科KPA MoDK的另一種被控對象(Vrep),并且也體現了另一種軸實例的初始化方式——源代碼配置,即通過直接在程序中添加源碼以到達修改軸配置參數的目的。相比上一個例程中的“界面配置+源碼導入”的環境初始化方式,這種配置方式無疑會更加繁瑣,而且會增加源代碼的代碼量。但是在此部分代碼完成后,再次修改軸配置參數的步驟可以直接在代碼中進行,而另一種環境初始化方式則仍需要重新配置生成ini文件。
例程測試的步驟如下:
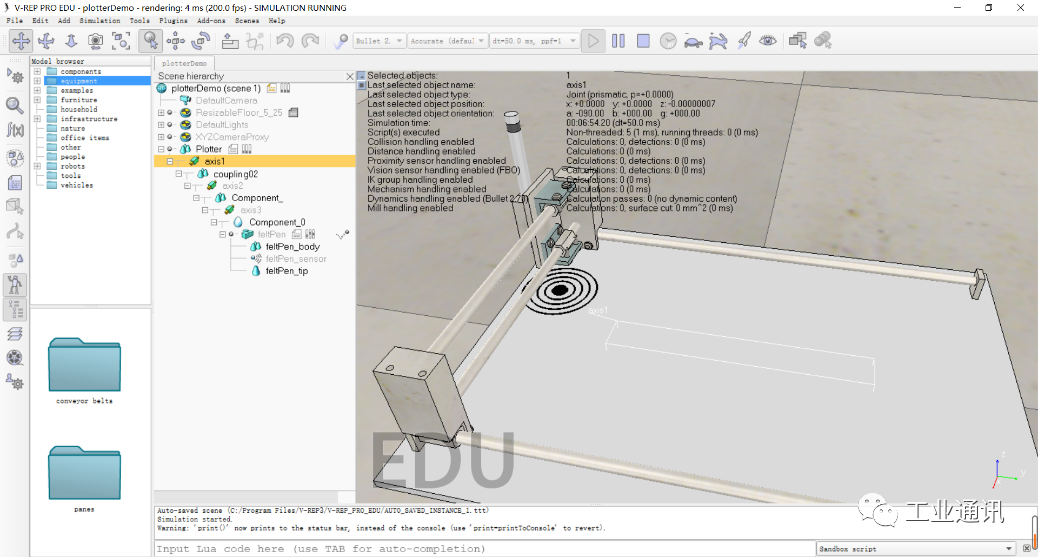
在VREP中打開官方提供的三軸線性機器人模型
虹科MoDK提供了一個Vrep三軸線性機器人模型,在開發包的samples文件夾下,安裝Vrep后,雙擊即可在Vrep中打開模型
在代碼中修改VREP的端口參數
虹科MoDK提供的Vrep模型使用3.04.00版本的Vrep開發,而目前在官網上下載的Vrep版本已經到達了3.5.0。不過這并不需要用戶進行太多的適配操作,新版本的vrep會向下兼容舊版本vrep的模型。
觀察控制現象
修改完成后,即可進行例程測試,點擊ctrl+F5,切換至VREP窗口,即可觀察到機器人末端按照預定的軌跡點進行運動。用戶也可以使用自己的算法生成所需要的軌跡在此demo中進行測試
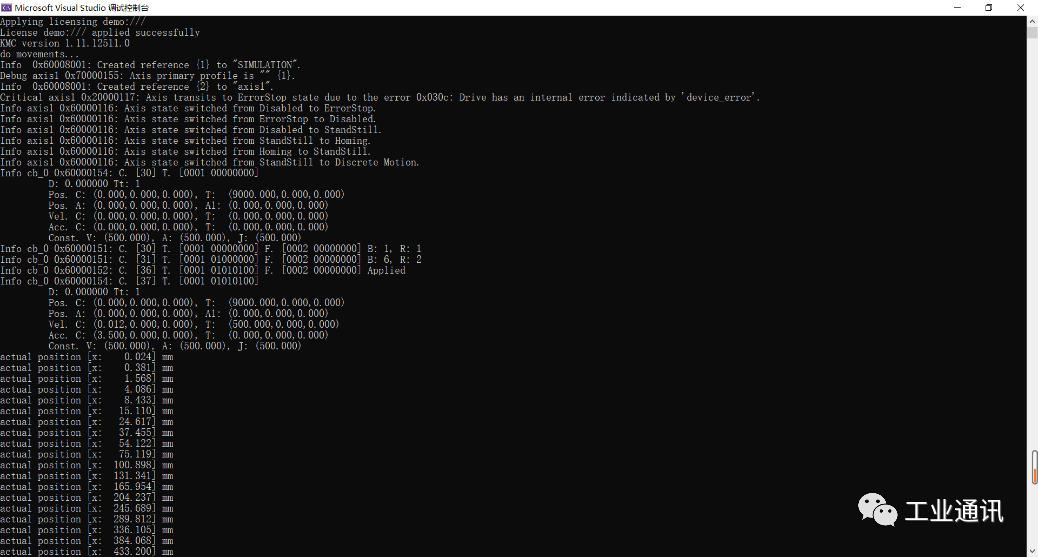
3.Simulation_move_absolute (Simulation)
此例程為純文字仿真,不需要進行額外的操作。MoDK在虹科KPA運行環境內創建了虛擬軸句柄,simulation即對這些虛擬軸句柄進行虛擬化運動,反映在讀取的各軸位置、速度值發生變化。
切換啟動項目,按下ctrl+F5,即可開始仿真。
 ?
?4. Move_complex_drawing (EtherCAT & CiA402 + Vrep)
對于可控制的三種被控對象,虹科MoDK可以同時控制其中任意兩種,此部分選取EtherCAT伺服電機+Vrep機器人模型這兩種比較直觀的被控對象進行測試。測試控制的對象是三個maxsine的EtherCAT伺服電機,加上Vrep中的三軸線性機器人模型。
例程測試的步驟如下:
在虹科KPA Studio中進行網絡組態
此部分操作與第1個例程Move_relative (EtherCAT & CiA402)的操作基本相同,可參照前文進行。
打開Vrep中的三軸線性機器人模型,并將軸與伺服電機進行對接
留意此處線性機器人模型的名稱,后續會使用到。并且注意到,機器人的axis1使用y軸坐標表示,axis2使用x軸坐標表示。而代碼的邏輯是按照x、y的順序進行掃描的。因此在初始化配置的時候需要留意軸的編號指定,即將編號1(x軸)指定到axis2,編號2(y軸)指定到axis1。
修改V-REP參數和通用參數,并克隆電機軸
將參數修改為所需的參數,完成電機軸參數配置后克隆電機軸,然后只需要為克隆出來的電機軸綁定伺服、設定Vrep機器人模型的軸編號、修改Vrep端口號即可。
導出文件,修改源代碼部分參數后按下“ctrl+F5”,即可看到控制現象:Vrep中的機器人模型進行圓周運動,EtherCAT伺服也在帶動電機進行運動。
 ?
?
總結CONCLUSIONS
1. 觀察MoDK的例程代碼,可以發現其程序編寫遵循一個比較規整的三步走模式:聲明變量→創建實例→函數調用,軸控制循環則采用狀態機的方式實現。但這種PLC的編程方式雖然用起來的思路比較明確,但是代碼量看起來會相當龐大,可維護性相對較差。2. 因而MoDK最好的使用方式,仍是結合虹科Straton使用PLC語言進行開發。虹科Straton擁有獨立的變量編輯器,并且PLC功能塊創建與調用本身就是一體化的,可以極大減少開發的工作量,程序的維護也變得直觀與簡單起來。
-
測試
+關注
關注
8文章
5633瀏覽量
128338
發布評論請先 登錄
KaihongOS操作系統:開發環境搭建

虹科直播回放 | IO-Link技術概述與虹科IO-Link OEM

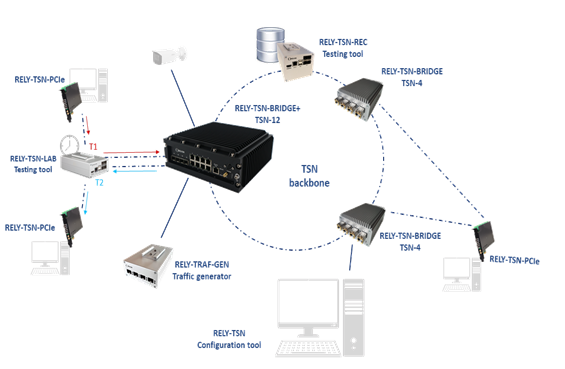
虹科方案 僅需4個步驟!輕松高效搭建虹科TSN測試網絡
【AI技術支持】ESP32-S3運行例程電腦無法識別USB設備問題處理

虹科活動回顧 | 波形診斷開放日-上海站圓滿落幕!
干貨!基于RK3568的 AI 人工智能環境搭建步驟
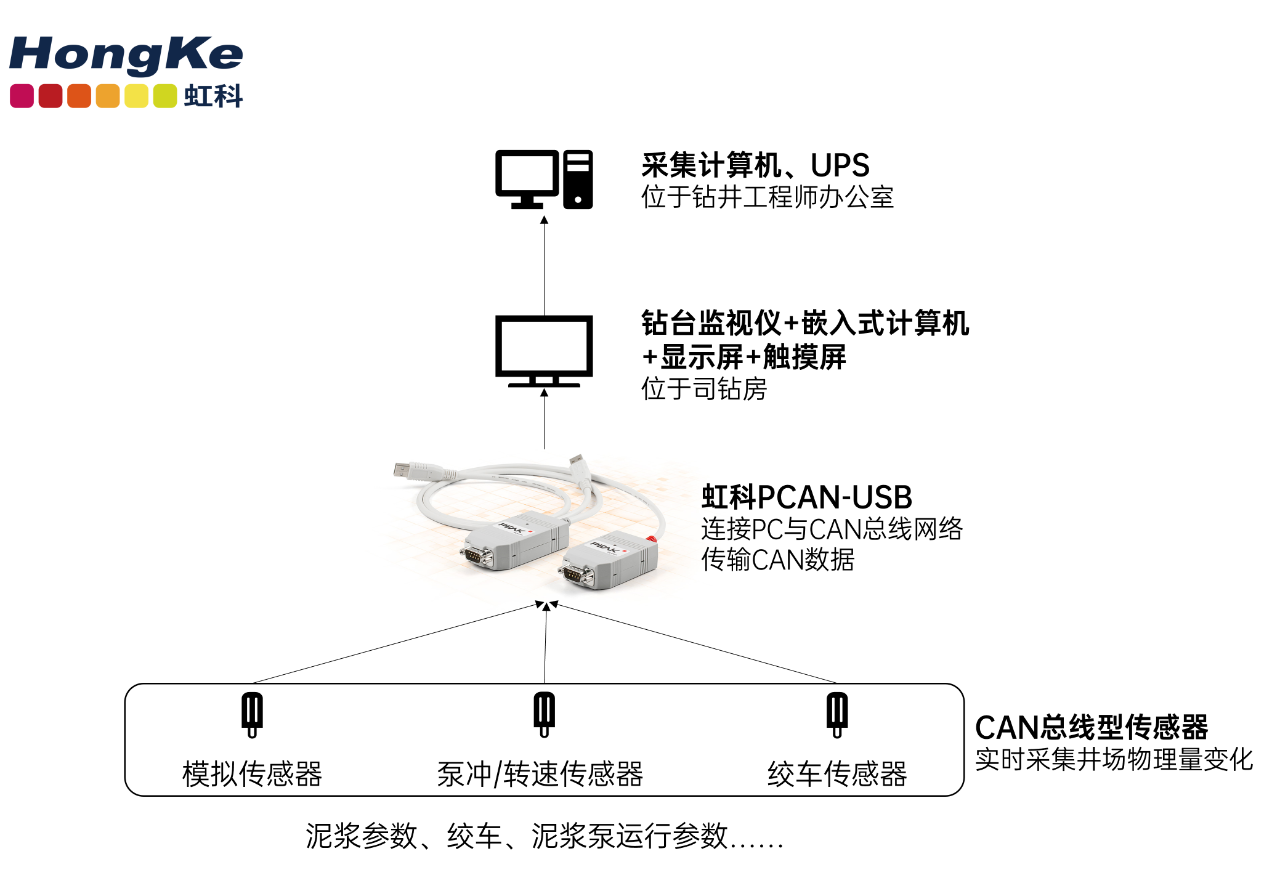
虹科應用 為什么虹科PCAN方案能成為石油工程通訊的首選?
手冊上新 |迅為RK3568開發板NPU例程測試
虹科干貨 輕松掌握PCAN-Explorer 6,dll調用一文打盡!
手冊上新 |迅為RK3568開發板NPU例程測試
pytorch環境搭建詳細步驟
在美國VPS上設置開發和測試環境的基本步驟和技巧

虹科干貨 |?多設備協同無憂:Linux環境下PCAN固定設備ID/通道分配指南






 工商網監
工商網監
評論