") MTi-30-2A8G4陀螺儀 XSENS品牌
MTi-30-2A8G4陀螺儀 XSENS品牌
MTi-3 是一個(gè)獨(dú)立的姿態(tài) 和 航向參考系統(tǒng)(人力資源部)。 除了 由 MTi-1 和 MTi-2收集和計(jì)算的數(shù)據(jù)外 , 它還 提供 真正的北參考 偏航角或航向。
作為在MTI的成員1 -系列,MTI-3突出其小外形(12.1毫米X12.1毫米),易于集成,低成本和魯棒性-以及其捷聯(lián)積分算法。MTi-3適用于廣泛的(嵌入式) 應(yīng)用,讓您無(wú)需集成和維護(hù)陀螺儀、加速度計(jì)和其他傳感器,也無(wú)需設(shè)計(jì)一體式 AHRS 解決方案。
傳感器融合性能
滾轉(zhuǎn)、俯仰
0.5 度 RMS
偏航/航向
2 度 RMS
位置
捷聯(lián)積分 (SDI):是
傳感元件
陀螺儀
標(biāo)準(zhǔn)全范圍:2000 度/秒
運(yùn)行中偏置穩(wěn)定性:10 度/小時(shí)
噪聲密度:0.007 o/s/√Hz
加速度計(jì)
標(biāo)準(zhǔn)全量程:16g
運(yùn)行中偏置穩(wěn)定性:30 μg
噪聲密度:120 μg/√Hz
可用磁力計(jì)
系統(tǒng)規(guī)格
機(jī)械
IP 等級(jí)(等效):IP00
尺寸:12.1 x 12.1 x 2.55 毫米
重量:0.6 克
電氣
輸入電壓:2.19 至 3.6V
功耗:44 mW @ 3V
接口/IO
接口:UART、SPI、I2C
協(xié)議:Xbus
輸出頻率:高達(dá) 2kHz
MTI-630R
MTi-2-0I-T
MTi-3-0I-T
MTI-670G
MTi-7-0I-T
MTi-620R
MTi-1-0I-T
MTi-610R
MTI-680G
MTI-200-2A8G4
MTI-300-2A8G4
MTi-620
MTi-670
MTi-630
MTi-670-DK
MTI-G-710-2A8G4
MTI-100-2A8G4
MTi-30-2A8G4
MTi-610
MTi-30-2A8G4-DK
CA-MP2-MTi
CA-USB2-MTI
CA-USB4-MTI
CA-USB6-MTI
ANT-P
CA-USB-MTi
MTI-3-DK
MTi-7-DK
ANT-MULTI
MTI-300-2A8G0
MTI-30-4A8G4
MTi-1-0I-C
MTi-3-0I-C
MTi-3-0I-R
MTi-1-0I-R
MTI-30-6A8G4
MTi-7-0I-R
MTi-2-0I-R
MTi-7-0I-C
MTi-2-0I-C
MTi-670G-SK
MTi-630R-SK
MTi-3-0I-DK
MTi-7-0I-DK
MTi-680G-SK
MTI-300-2A8G4-DK
MTI-200-2A8G4-DK
MTI-G-710-2A8G4-DK
CA-MP-MTI-12
ANT-GNSS-RTK
ANT-GNSS-RTK
CA-USB-CONV
CA-MTI-FLAT
MTI-100-2A8G4-DK
MTi-630-DK
MTI-G-710-6A8G4-DK
MTI-30-4A8G4-DK
MTI-30-6A8G4-DK
MTi-680-DK
MTi-680
CA-MP2-MTi
CA-USB4-MTI
CA-USB6-MTI
CA-USB-MTi
CA-USB2-MTI
CA-MTI-FLAT
-
陀螺儀
+關(guān)注
關(guān)注
44文章
828瀏覽量
99672 -
Xsens
+關(guān)注
關(guān)注
0文章
15瀏覽量
12958
發(fā)布評(píng)論請(qǐng)先 登錄
“MEMS陀螺儀”小到極致,穩(wěn)如磐石!

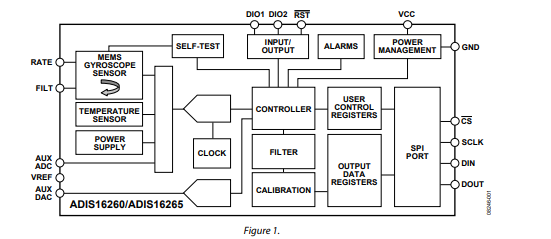
ADIS16260 ADIS16265可編程低功耗陀螺儀技術(shù)手冊(cè)
智能關(guān)停,高速風(fēng)筒方案中陀螺儀技術(shù)的精準(zhǔn)應(yīng)用

MCXN947怎么驅(qū)動(dòng)FRDM-STBI-A8974三軸陀螺儀?
愛(ài)普生XV7021BB陀螺儀傳感器在人機(jī)交互中的應(yīng)用

嵌入式學(xué)習(xí)-飛凌嵌入式ElfBoard ELF 1板卡-運(yùn)動(dòng)追蹤之六軸傳感器icm20607介紹
飛凌嵌入式ElfBoard ELF 1板卡-運(yùn)動(dòng)追蹤之六軸傳感器icm20607介紹
愛(ài)普生XV-9300LP汽車(chē)陀螺儀傳感器的特征和用途
愛(ài)普生M-G365PDC1/M-G365PDF1六軸陀螺儀

愛(ài)普生X2A0002710002 XV7011BB陀螺儀傳感器用于高精設(shè)備行業(yè)

優(yōu)可測(cè)白光干涉儀:激光陀螺儀提升良率與精度的關(guān)鍵
陀螺儀LSM6DSV16X與AI集成(11)----融合磁力計(jì)進(jìn)行姿態(tài)解算

愛(ài)普生(EPSON) 慣性測(cè)量單元(IMU)、陀螺儀傳感器等模塊應(yīng)用領(lǐng)域選型介紹

陀螺儀LSM6DSOW開(kāi)發(fā)(2)----上報(bào)匿名上位機(jī)實(shí)現(xiàn)可視化

愛(ài)普生(EPSON)陀螺儀傳感器的特點(diǎn)和應(yīng)用領(lǐng)域介紹





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論